
有限空间针状科普艺术装置的优化方案与系统设计
2023-10-10 08:34郑波
机电信息 2023年19期
郑 波
(合肥探奥自动化有限公司,安徽 合肥 230000)
0 引言
科技馆的存在,不仅仅是给参观者提供信息,其真正的价值在于培养人们的好奇心和洞察力[1],激发人们思考和创新的热情以及最重要的行动力。本文针对科技馆中的标志性展项“魔针”展开分析,通过探讨魔针设计方案落地与施工安装调试的过程,最终完成有限空间作业面内的系统设计和优化方案。
1 展品原型设计理念
1.1 初期构思
最初的设计思路为:结合整体环境做一个包含几何内容的具有代表性特点的展品,并将展品单独陈列,将它作为一种标识、一种缩影、一种象征,能够引导参观者在游览后想到“魔针”就会想到特定的科技馆。
1.2 分析、优化
当初步设计思路制定后,团队对设计理念进行深入的探索研究,并在与业主方反复沟通、对比、确认后,终于确定了展品的最终方案思路:在原设计理念里加入一些科学和艺术元素,使展品整体不再只是一个为了展示而展示的展品,而是成为一个具有科学、人文、艺术等多方面元素的综合体,不仅从展品本身体现科技馆的固有特色,更从展品的设计上突出对科学理念的挖掘。
1.3 形体确认
根据最终确定的设计理念,展品定义为:研究空间结构与性质的几何内容与LED相结合的“魔针”展项[2]。此展项中既有对数学研究的探索,又有在科技加持下的展品,展现在参观者眼前给予一种视觉冲击的效果。展项“魔针”将机械运动与几何知识相结合,旨在展示几何学的多变性与无限可能性。
魔针位于展墙上,利用超高压水刀在展墙上开取数个孔洞,魔针的整套机械结构和控制系统全部设置在这些孔洞背后,魔针的动力系统主要由伺服电机构成,每个电机连接着转轴穿过孔洞伸出到展墙的表面,每个转轴上均有4个摆杆,上面覆盖着全彩LED灯带,通过展墙后面的控制系统变幻出形态各异的奇妙图案。
2 总体结构与施工内容
2.1 总体结构
魔针位于某科技馆中庭建筑墙内,制作于其中一层扶梯的反面墙体上,由三行三列模块分布而成,展示在8.8 m×8.8 m的平面上,每个模块有4根1.8 m的LED灯板,通过展墙后面的控制系统变幻出形态各异的奇妙图案,其造型如图1所示。

图1 魔针现场展示图
2.2 施工内容
本展品的展示方式不同于普通展品那样仅是平放在地面或墙面上供人参观、游览,它是采用壁挂模式悬挂在墙体之上,所以在展示科技的同时[3],强度和承重也成为其基础制作的要点,故而需在其背后的墙面内部预埋管件做承重基础。而墙面为原建筑墙面,已完成干挂大理石装饰面,在早期施工时未曾预留预埋管线,经讨论询问后得知,将墙面拆除重建属于危险系数较大的工程,须在不破坏墙面承重的基础上改造部分区域,而后在墙面背面进行钢架搭建,并使前面展示部分与后面基础部分拼接在一起,在为展品固定基础的同时也对展品的承重起到了关键作用。所以,施工方式为在原建筑墙面进行开孔穿管,并将管件拼接固定在墙面后背的钢架之上(图2)。

图2 魔针安装示意图
2.3 电气系统设计
“魔针”展项是一组三维立体运动与显示相结合的项目,为了实现馆方和效果设计方的设计意图,在整个项目图像显示方面采用了先进的图像处理和传输技术,在整个项目的运动方面采用了强大的伺服驱动技术。DP总线协议是工业上非常成熟的一种通信方式,具有高效率、低成本的特点,绝大多数工业级产品都可以支持DP协议,因此整个项目通过PROFIBUS DP协议与各子站进行通信,性能稳定可靠,这将为以后魔针的升级换代带来不可替代的优势。“魔针”展项以工控机为控制载体,NI控制卡为控制核心,采用WAGO分布式模块、西门子分布式模块和施耐德伺服系统为输出载体,驱动外围硬件来体现魔针的魔力(图3)。工控机发出指令,通过WAGO分布式模块控制柜内低压器件动作,通过西门子分布式模拟量模块控制彩灯的闪烁颜色变化,通过施耐德伺服系统驱动外围机械结构。整个系统以一个高效而稳定的方式有条不紊地执行设定的动作,可变换升级性强,维修方便。
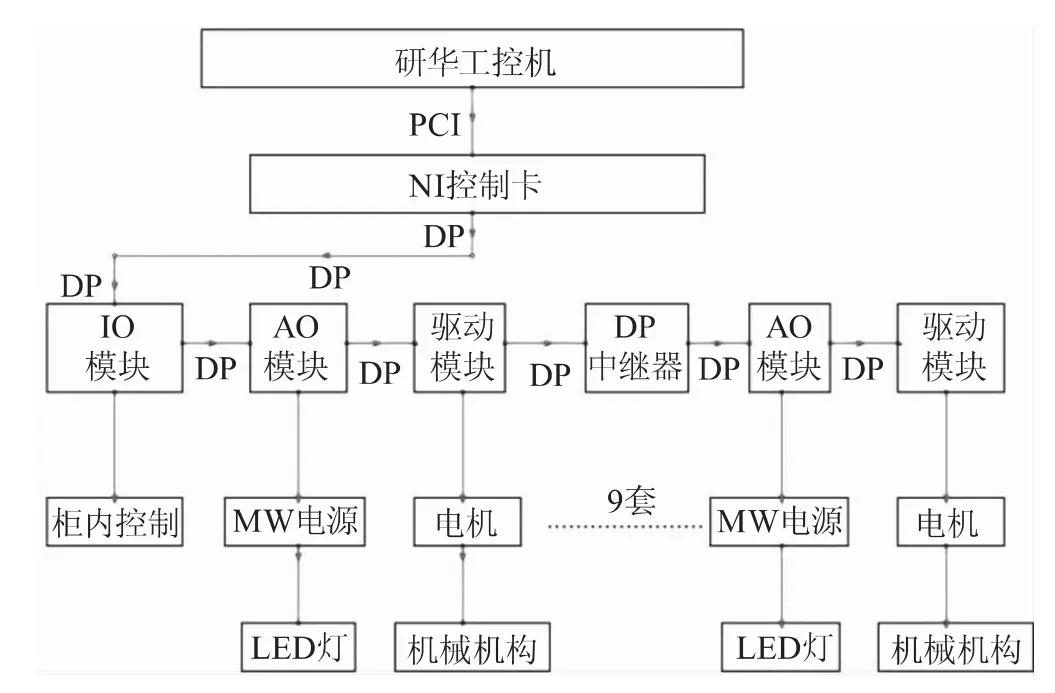
图3 电气系统配置示意图
2.4 控制系统及组成
2.4.1 电控设计思路
“魔针”展项是将空间几何学和视觉影像艺术相结合的一种高科技产物,对于运行轨迹和灯光变幻的控制都提出了非常高的要求,其电控部分主要包括电机、导电滑环、控制柜,主要实现空间不同位置组合和灯光变幻的组合。为了能准确完成整个系统的精确控制和灯光变幻艺术效果的控制[4],采用当前最新的现场总线控制技术,选用主从模式,在轨迹和位置运算方面,功能运算和规划放到主站实现,用LabView编程语言来实现主站的编程;对生成的过程控制数据通过PRIFIBUS DP总线主站板卡来实现对从站的通信。从站由36台伺服从站、9台灯光控制从站、1台IO点控制从站组成,所有从站都能通过总线通信的方式来交互数据。伺服电机使用施耐德进口电机,IO点从站模块采用德国知名品牌——WAGO模块,主站卡也是德国进口品牌,主控制柜和低压电器选用法国施耐德电气产品。
2.4.2 电控设计方案
2.4.2.1 控制过程
主站通过过程控制模型计算出每个运动伺服电机的参数,如速度、加速度、时间、位置参数,再一起下发到每个伺服电机,然后发送“开始运行”指令,在运行过程中,不停刷新灯光控制模块的参数值,来实现灯光颜色和亮度的变幻。总线通信具有高速性,因此可以实现位置变化和灯光变幻的统一和配合(图4)。
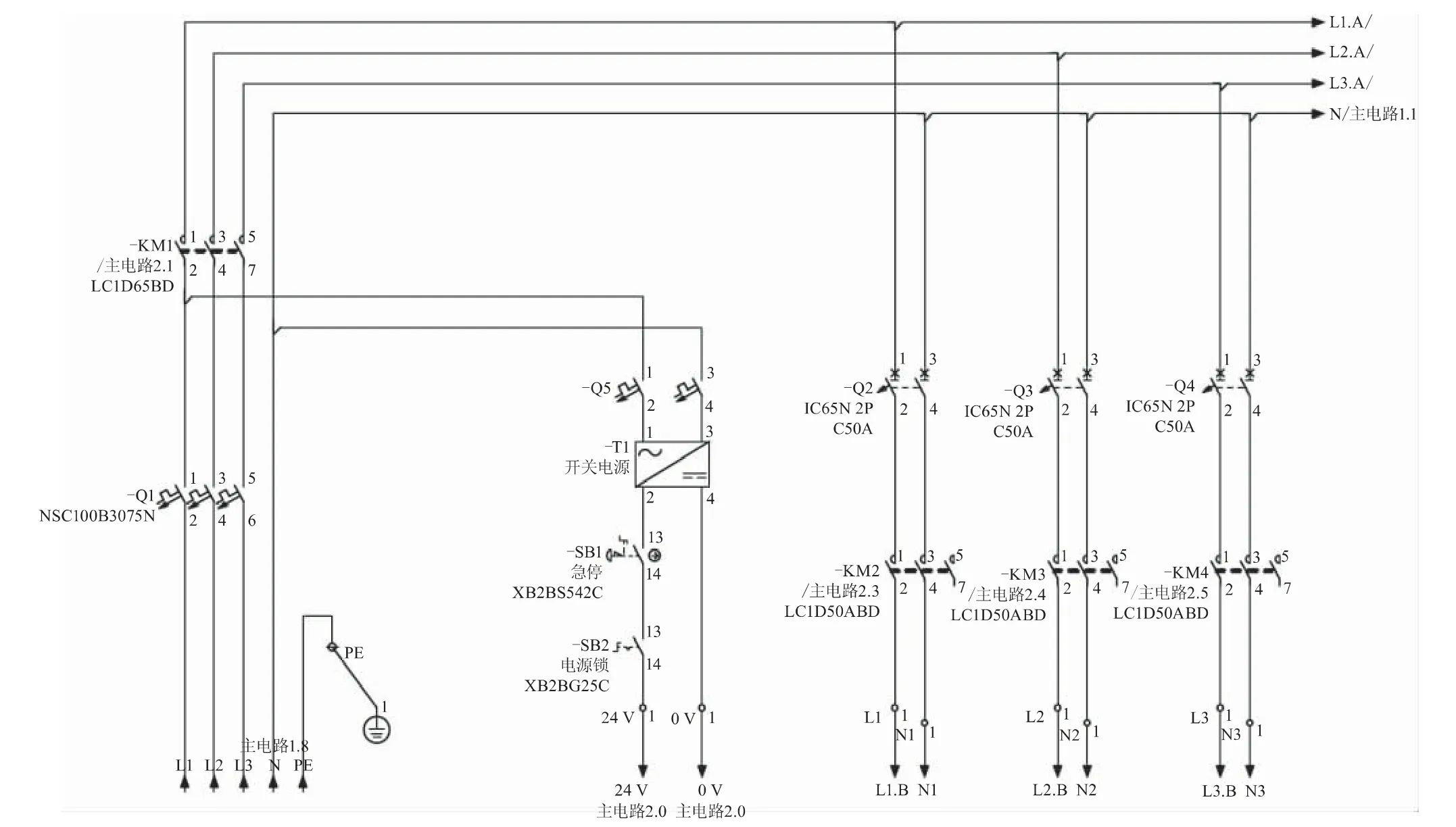
图4 电控系统示意图
2.4.2.2 技术参数
整个系统在设计时考虑了电磁兼容和抗干扰方面的要求,对于总线增加了一个西门子的总线控制器,来提高整个总线的信噪比,减少通信的误码率,为整个系统的高速高效稳定运行提供了硬件保证。在低压电器方面进行了优化设计,使得手动和自动模式可以自由转换,简单操作,能实现全自动运行,减少人员操作工作量,简单易用。
展项参数如表1所示。
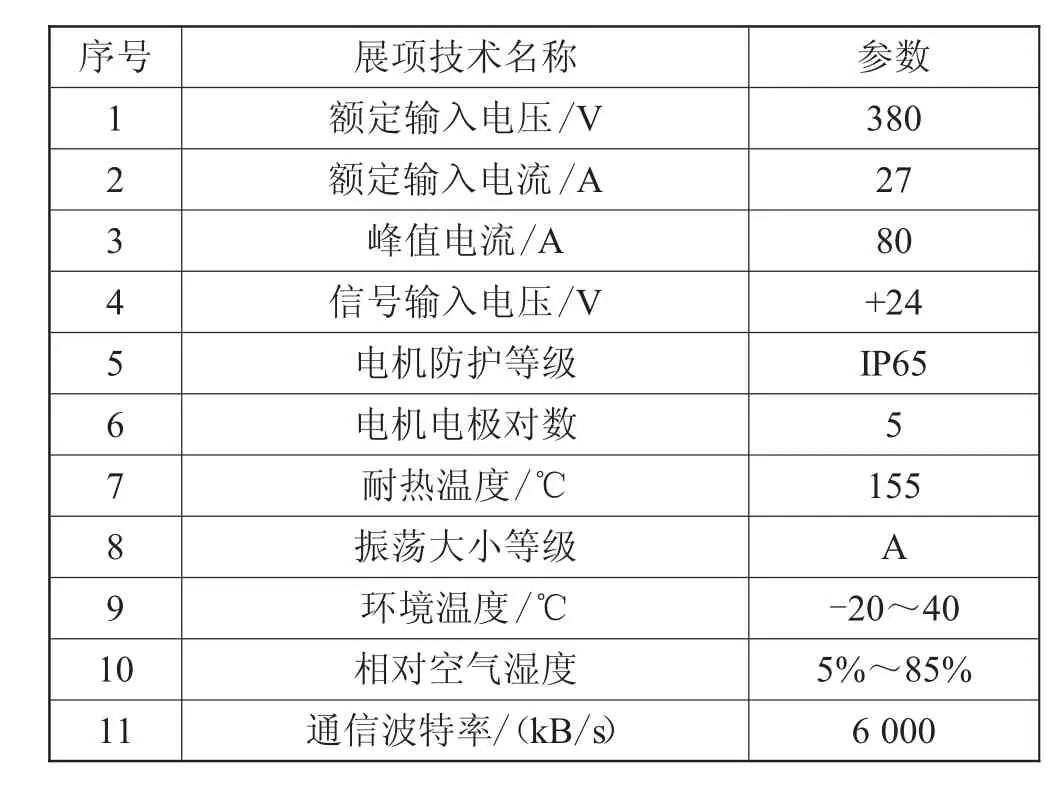
表1 展项参数表
2.5 机电设备安装难点分析、解决方案
本展项设备间后部施工空间有限且需高空拼接作业,因此为施工过程带来了不小的困扰。其中登高作业难度较大,不仅需要在高处进行拼接施工,还需要保证施工安全[5]。因此,会同现场技术人员测量探讨后决定,前部中庭的灯管模组将脚手架作业模式优化为脚手架结合自行式升降机模式,既能保障安全又能方便灯管的安装作业。在设备间后部作业顶面位置加装吊装葫芦,为上方拼接作业人员提供安全作业平台,用跑车葫芦将已拼接完成的部分吊至指定位置,后由作业人员在下部进行拼接组装,整体作业完成后由吊装葫芦将作业人员运送至高处指定位置,将已拼接完成的拼接件与前面展示部分连接为一个整体,完成钢架施工全部作业内容。
因为空间狭小,无法同时堆积大量材料及施工器具,所以展品所需钢架由外部空旷空间拼接为80 cm×40 cm×80 cm的拼接段(图5),相继运至作业区内,而后由跑车葫芦将拼接段已完成部分整体向上拖移至指定位置,进行拼接组装。

图5 展品焊接段照片
展品整体固定及承载施工均应避开原建筑墙面中的钢梁部分,如钢梁位置与施工位置有冲突,则采取绕梁处理,处理办法如图6所示,冲突部分则采用绕梁办法进行固定。绕梁施工区域需要钻孔处理,孔径一般为100 mm,绕梁钢架呈U形固定。
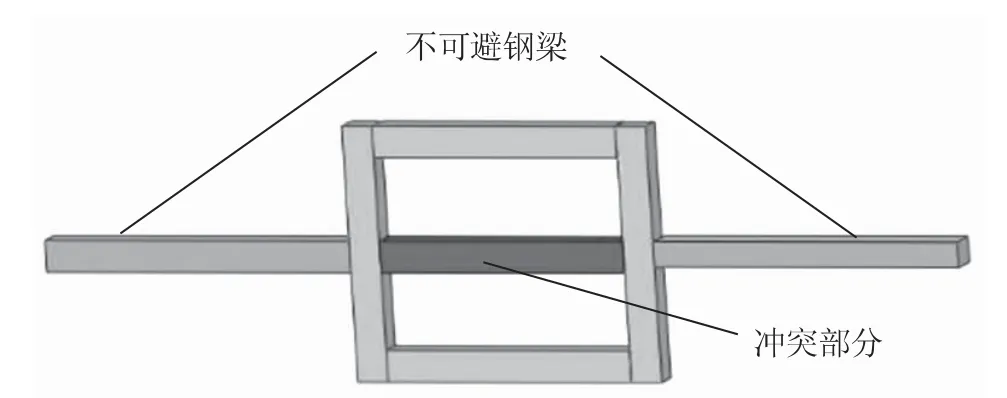
图6 过梁示意图
2.6 灯具组装
拼接件安装完成后,由现场操作人员将指示灯从中心模块开始往四周安装,其中横向和纵向的指示灯是交叉重叠的,所以安装的层次也应隔开,灯组宽度为80 mm,每两个之间的距离为100 mm(图7)。当所有灯管每组都处于同一个平面且运行无交叉干涉时,即为安装结束。
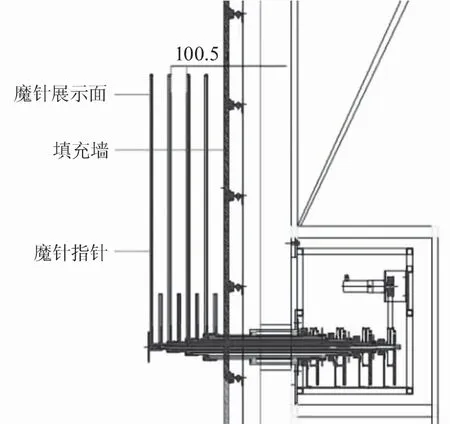
图7 灯组示意图
2.7 设备间恢复
当展品全部安装完成且调试无误后,将展项背面进行装饰恢复,使用轻钢龙骨进行支撑,顶面由阻燃板做基层面层,使用石膏板做恢复。整体恢复完成后,在管阀部位预留60 cm×60 cm检修口,以方便后续维修时使用。
3 结束语
综上所述,针对有限空间内的高空作业,充分考虑物体的运输和现场环境,对装置进行设计优化及方案落地,可以最大程度为项目增值,同时也可以实现科技馆的科普功能。“魔针”展项的施工不仅把“服务公众,安全第一”放在了首位,更使得项目质量得到了大幅提升。
猜你喜欢
设备管理与维修(2023年17期)2023-10-31
小主人报(2022年18期)2022-11-17
宝藏(2022年5期)2022-08-29
科普童话·神秘大侦探(2022年1期)2022-05-31
现代装饰(2021年2期)2021-07-21
小学生学习指导(低年级)(2017年12期)2017-11-22
制造技术与机床(2017年3期)2017-06-23
快乐语文(2016年12期)2016-11-07
科技传播(2015年13期)2015-09-16
世界制造技术与装备市场(2015年6期)2015-02-28
