
基于绿色农业的智能喷药机器人的设计与应用
2023-10-10 18:44:23申宾德崔玉萍徐生龙
甘肃农业科技 2023年9期
申宾德 崔玉萍 徐生龙

摘要:随着农业生产的发展,传统的喷药方式存在着药剂浪费、环境污染和作物质量下降等诸多问题。通过智能喷药机器人的应用,提高农业喷药的效率、减少药剂的使用量和环境污染,以推动绿色农业发展和提高农产品质量。结合物联网、大数据和人工智能等技术,设计了一款由底盘、四轮驱动机构、自动配药装置、喷药装置及智能控制器、传感器等组成的喷药智能机器人,能在不同路况下行走工作。通过图像识别技术深度分析农作物所受病虫害情况,通过控制模块获取速度传感器、压力传感器及流量传感器瞬时数值动态调整药液浓度、喷药压力,实现喷药过程平稳工作。该系统的设计为后续根据作物生长态势精准靶向喷药及远距离喷药等功能实现提供思路。
关键词:绿色农业;智能喷药机器人;物联网;大数据;人工智能
中图分类号:S224 文献标志码:A 文章编号:2097-2172(2023)09-0859-06
doi:10.3969/j.issn.2097-2172.2023.09.014
Design and Application of Intelligent Spraying Robots Based on
Green Agriculture
SHEN Binde, CUI Yupin, XU Shenglong
(Wuwei Vocational College, Wuwei Gansu 733000, China)
Abstract: With the development of agricultural production, traditional spraying methods are faced with many problems such as pesticide waste, environmental pollution, and decreased crop quality. Through the application of intelligent spraying robots, the efficiency of agricultural spraying could be improved, and the amount of chemicals used, and environmental pollution could be reducedso as to promote the development of green agriculture and improve the quality of agricultural products. By combining technologies such as the Internet of Things, big data, and artificial intelligence, an intelligent spraying robot is designed which consists of a chassis, four-wheel drive mechanism, automatic dispensing device, spraying device, intelligent controller, sensor, etc., and could walk and work under different road conditions. By using image recognition technology to deeply analyze the situation of diseases and pests that crops suffer from, the instantaneous values of speed sensors, pressure sensors, and flow sensors are obtained through control modules to dynamically adjust the concentration and spraying pressure of the pesticide solution, which achieves smooth operation during the spraying process. The design of this system provides ideas for the subsequent implementation of precise and targeted and long-distance spraying functions based on crop growth.
Key words: Green agriculture; Intelligent spraying robot; Internet of Things; Big data; Artificial intelligence
收稿日期:2023 - 07 - 16
基金項目:2023年武威职业学院校级科研项目(ZYY2023002)。
作者简介:申宾德(1982 — ),男,甘肃武威人,副教授,硕士,主要从事农业机械装备及控制工程的研究工作。Email: 119251219@qq.com。
通信作者:崔玉萍(1983 — ),女,甘肃武威人,副教授,硕士,主要从事物联网及控制研究工作。Email: 119268827@qq.com。
绿色农业是一种以生态环境保护为导向,注重可持续发展的农业发展类型。其核心目标是实现高产、高效、高质、低耗、安全的农业生产方式[1 ],同时最大限度地减少对自然资源的损害和环境污染[2 ]。我国为农业大国,但农用机械技术应用相对落后,尤其果蔬喷药类机械和技术应用尚未成熟,传统的果蔬喷药作业大多采用人工背负沉重药箱喷洒药液的方式,而该作业方式因作业人员近距离接触药液,且缺乏一定的保护装置,在喷药过程中极易造成人体伤害甚至中毒死亡,而滥用或过量使用农药也给生态环境带来很多危害。
近年来随着科技发展,用于农业生产各种场景作业的农业机器人应运而生,如采摘机器人、移栽机器人、浇花机器人等智能机械。而智能喷药机器人基于国外喷药机器人通常以拖拉机牵引,大型机械为主,而国内喷药机械缺乏个性化智能控制,价格较高等原因尚未推广应用,因此目前我国大部分地区喷洒农药依然采用传统手工作业的方式,人们通过自身的经验和感知,根据农药说明书手工配兑农药的比例和喷洒剂量,存在农药配比浓度、喷洒剂量不均衡的现象,且手工作业存在覆盖范围小、工作效率低下、造成人力物力浪费以及农药对喷洒作业人员的身体健康存在一定的危害等,各种农药、废弃污染源等使农业作业环境变差,操作人员在喷药时容易中毒,导致工人不愿意给农作物喷药。
基于以上因素分析,笔者研制了一款基于绿色农业发展的智能喷药机器人,该设备能够通过系统识别植物病虫害的种类,系统将根据事先设定好的比例进行混合,根据所规划的路径进行工作,且农药配比准确,喷洒均匀,也能够避免对农药喷洒人员的健康产生危害,减轻了人工,提高了工作效率。
1 智能喷药机器人机械结构总体设计
1.1 智能喷药机器人总体结构
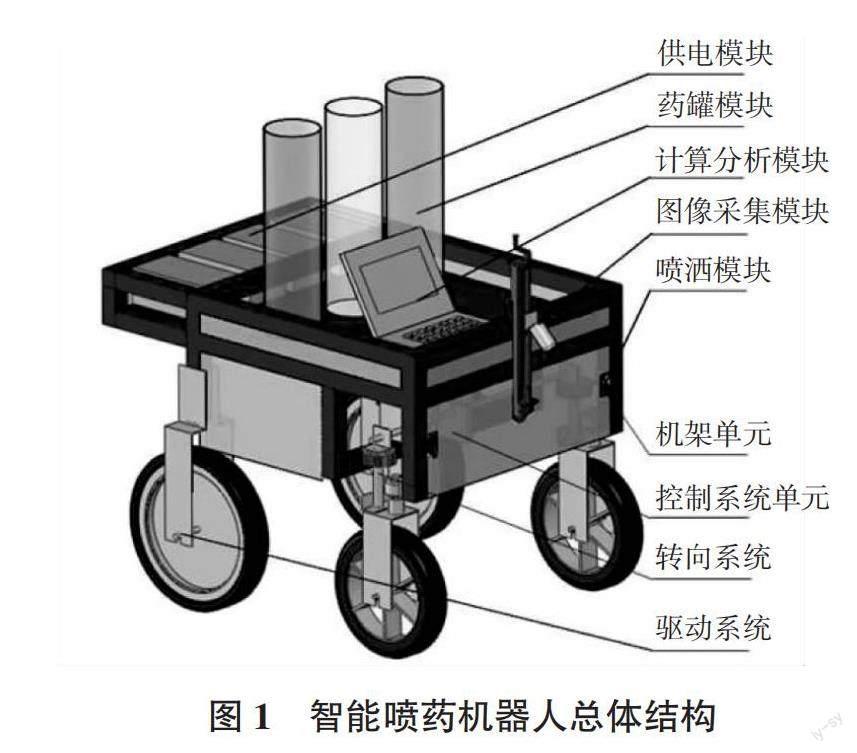
智能喷药机器人主要由供电模块、药罐模块、计算分析模块、图像采集模块、机架单元、控制系统单元、转向系统和驱动单元组成(图1)。
1.2 机械结构设计思路
智能喷药机器人是绿色农业中的重要装备之一,其机械结构设计需要考虑机器人的移动性、稳定性和可靠性。结合喷药机器人的实际工作环境,智能喷药机器人的机械结构具备良好的移动和变向功能,并能够适应田间地形和地势。
1.3 关键结构设计
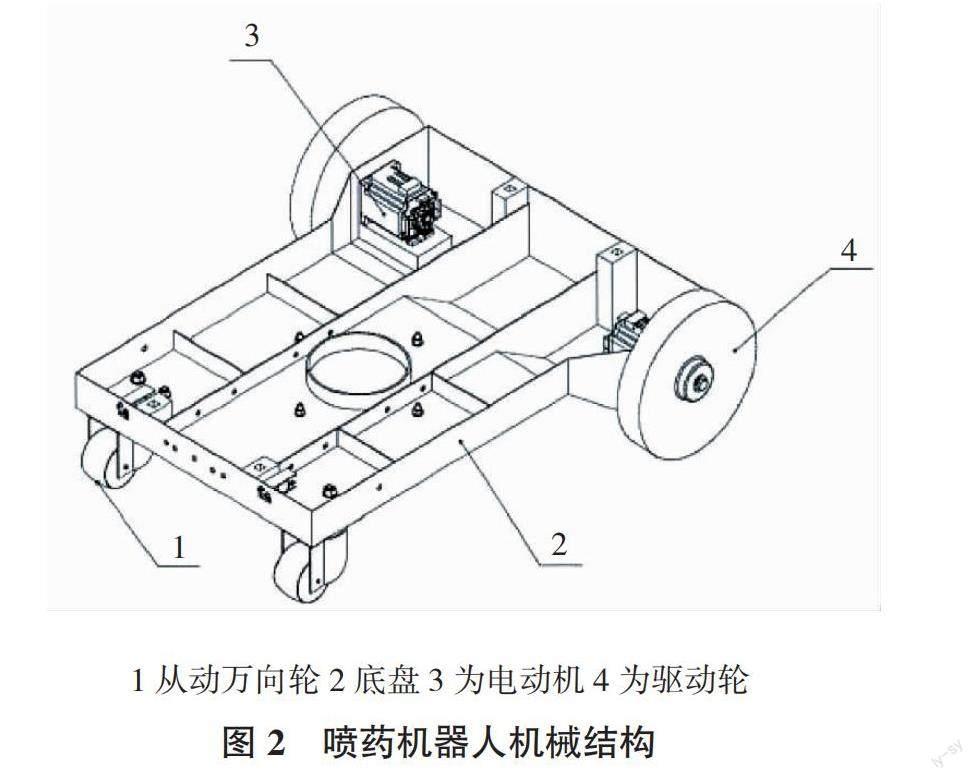
1.3.1 行走机构机器人 行走机构在工作中需在复杂的地面环境下能实现平稳直行、转弯灵活,不碰撞农作物造成伤害。其底盘结构具有一定的承重能力,能够承受药液箱、各种监测传感器及控制板等部件满负荷状态下的重量。行走驱动装置能通过电池或电缆提供电力作为动力。目前机器人的行走方式主要有两种,仿生机构(仿人或动物)及轮式或履带式机构[3 ]。本设计采用了轮式驱动机构,轮式因速度快、运转灵活被普遍应用,可实现在平稳直行、转弯等动作。喷药机器人驱动装置如图2所示,在驱动方式的选择上选用控制较为简便、灵活的后轮驱动,动力源为电动机。而前轮为从动万向轮,主要作用是辅助移动和平衡支撑。
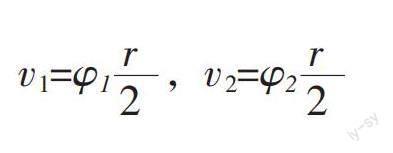
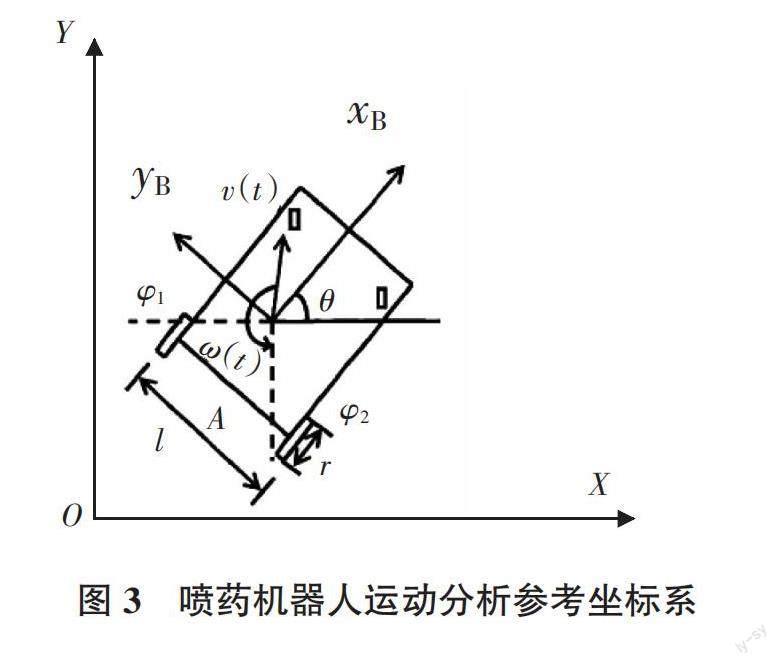
喷药机器人的运动环境是理想的平面,忽略地面与地形的影响;喷药机器人的轮子始终与地面保持垂直,仅存在单点接触,且没有相对滑动。喷药机器人运动分析参考坐标系的XOY为全局坐标系,XOY为轮式喷药机器人自身坐标系[4 ](图3)。其中,A为驱动轮轴中心点,l为驱动轮间距,r为驱动轮直径,v(t)为运动时机器人质心的线速度,ω(t)为质心的角速度,v1、v2为驱动轮速度[5 ],1、2为驱动轮转速,运动学方式如公式所示。
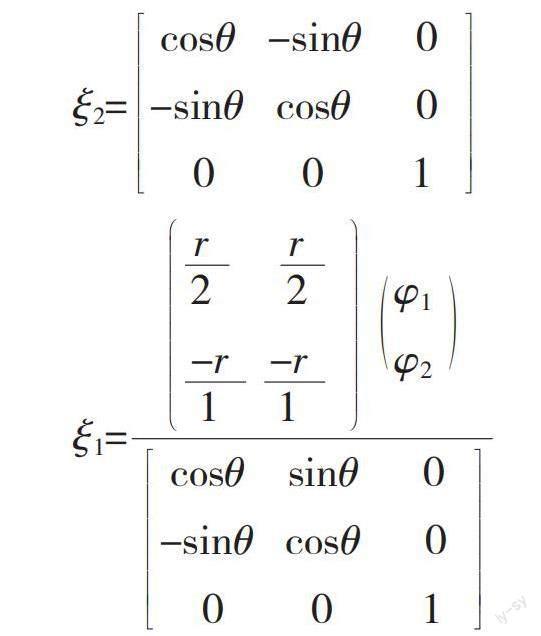
另外,需要将全局坐标系下的运动情况映射到喷药机器人自身的坐标系中来构建喷药机器人的运动学模型,即通过正交旋转矩阵来实现相应的映射,如以下公式所示。
式中,ξ1代表全局坐标系下的运动状态, ξ2代表自身坐标系下的运动状态。喷药机器人的运动学模型为其运动控制分析提供了理论基础,为后续的智能控制系统设计提供必要的依据。
1.3.2 药液箱的设计与材质 选用由于田间地势平整度不高,喷药机器人行走路况较为复杂,行走过程中会造成药液箱大幅晃动或倾倒等问题,为防止药箱内液体流通受限,在药液箱内采用等距离三格隔板对内部空间进行分离。药箱材料和隔板应选用重量轻且耐腐蚀性好的塑料箱体,降低喷药机器人的自身负荷。本设计的药液箱和隔板的材料均采用PE材料,常溫下耐酸碱腐蚀。药液箱规格为500.0 mm×400.0 mm×300.0 mm,三格隔板后的规格为389.0 mm×161.9 mm×285.5 mm,体积约18 L。整体药液箱包括进药口、储液箱体、水箱、隔板、出药管等装置。水箱安装在储液箱体的底部。分隔板竖直设置在储液箱体内,上端与储液箱体的顶部留有间隙,出水管的一端与水箱相连。出水管的另一端与三向阀相连,出水管上安装有抽液泵,套筒环绕在储液箱体的外侧,通过第一进液支管与三向阀相连,管道设置在储液箱体的出液室内,管道的一端通过第二进液支管与三向阀相连。本药液箱设计结构简单、便于制造和储液。
2 智能喷药机器人控制系统设计
2.1 智能喷药机器人循迹控制系统设计
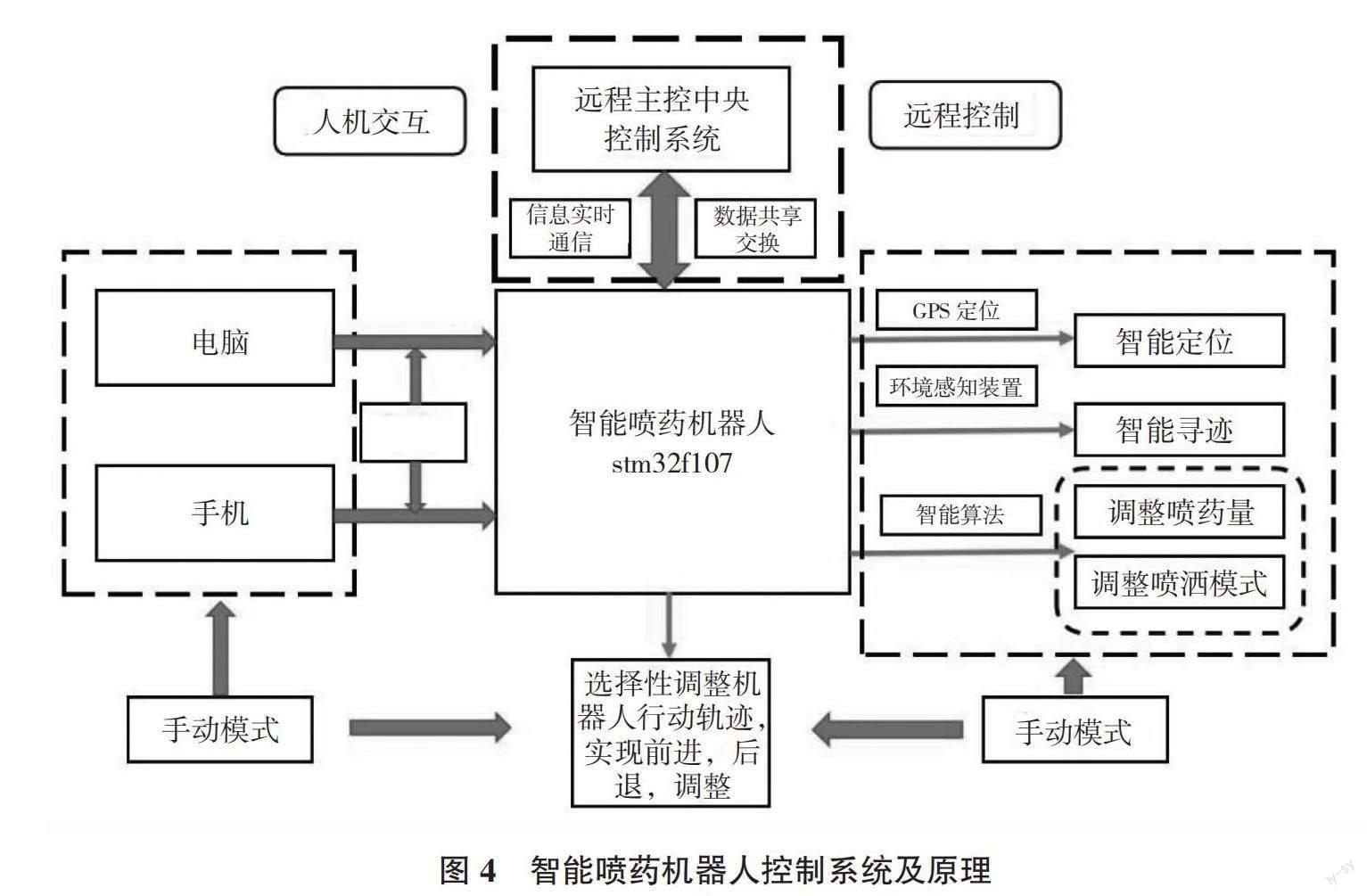
智能喷药机器人的循迹控制系统包括机器人智能感应控制系统,电脑、手机监控机器人循迹及移位系统,远程主控中央控制系统等三部分。为了进一步保证机器人喷药的稳定性,安全性和精准性,整个系统采用远程手动和智能自动控制完成(图4)。
2.1.1 机器人智能感应控制系统 路径规划与导航循迹利用定位系统和环境感知装置,机器人可以通过建立地图和规划路径来实现自主导航。可以采用SLAM(同步定位与地图构建)算法来建立环境地图并规划路径[6 ],以实现机器人的自主避障和路径规划。为实现自动行走过程通过性高且按照较为简单的运动路径执行,本设计的智能机器人主要依靠自身安装的工业相机、速度传感器及角度传感器来实现自身姿态和外部路径及环境信息的感知,对于采集的数据经过融合并运用已有的经验知识对环境空间的信息进行判断从而寻找到高效或者近似于最优的无碰撞的路径,实现安全快速地通行[7 ]。在两行农作物间采用局部定位的方式,通过实时地收集处理传感器采集机器人行走前方的图像信息,进而获得相对于两侧农作物的局部定位信息,最终实现该机器人自主避障及最优路径自主导航行走。
2.1.2 远程主控中央控制系统 通过物联网技术、大数据技术实现机器人可以与中央控制系统进行实时通信和数据交换。用户可通过人机交互界面完成机器人的远程控制。主控中央控制系统拥有较高权限,可以随时调整喷药机器人参数和目标要求,切换当前工作状态等。该智能机器人接收到中央控制系统的相关指令后,比对数据执行命令;同时中央控制系统具有对智能机器人统筹、管理、服务的功能。本设计的智能机器人也是远程中央控制系统的终端设备,既可以智能控制实施喷药,拥有一定的自主权,也需要由中央控制系统远程监控实施,防止智能机器人出现故障或者突发状态及时由远程中央控制系统接管处理。
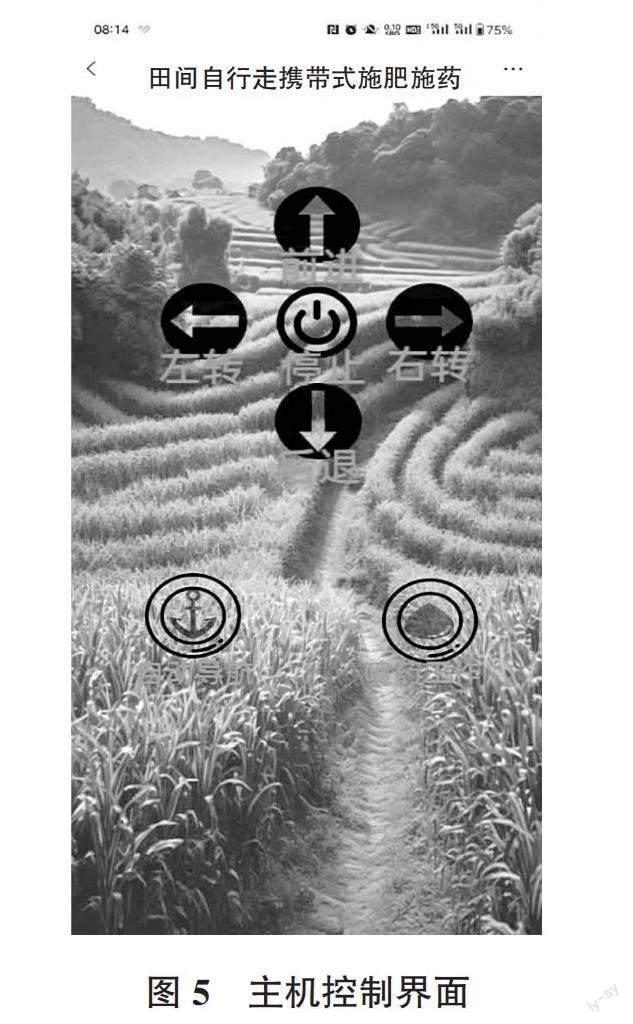
2.1.3 电脑、手机监控机器人循迹及移位系统 电脑、手机监控机器人循迹及移位系统是农户或专业技术人员通过手机应用或电脑远程监控机器人的工作状况,并进行必要的调整和控制。结合智能喷药机器人的基本结构设计和运动分析可知喷药机器人将支持机器人的前进、后退、转向以及调速。本设计的智能机器采用Blinker 自定义组件布局,按照当前的需要,可远程操作机器人循迹及移位控制、变量喷药控制等多个功能,其主机界面如图5所示。当点击手机或电脑界面上的不同按钮时,即时调用程序中所对应的回调函数,不同的回调函数对应着智能喷药机器人不同的执行动作,从而实现对智能喷药机器人的远程操控与监控。
2.2 速度、 压力和流量传感器
喷洒农药时,根据喷药机器人行走速度、病虫害种类及密度控制喷药剂量、浓度以及药液输送管道中药液的压力和流量[8 ]。该系统工作时通过速度传感器获取机器人行进速度确保管道中药液供应稳定,通过压力传感器和流量传感器使整个喷药装置形成闭环系统,采用模糊 PID 控制算法[9 ],共同检测管道中的压力值和流量值,动态调整药液喷洒剂量及喷雾大小,从而能较好地调整喷药系统最终实现稳定喷药作业。
2.3 自动变量喷药系统及控制方法
为了最大程度地提高喷洒效果和减少农药的使用量,通过图像识别技术获取农田病虫害的小面积差异信息[10 ],采用变量配药施药技术按需喷药,从而实现喷药量的精准控制。
2.3.1 基于图像识别的农作物病虫害 识别系统不断增加扩充目标农作物病虫害病理库,存储于计算机存储器中,喷药机器人通过图像识别技术,根据摄像头传送的影像资料,与库文件进行对比,深度分析农作物所受病虫害情况,提供分析结果给智能打药控制系统,为农作物选择农药种类提供依据。
2.3.2 基于微控制器的智能喷药控制系统 主要包括①基础数据采集。包含作业环境数据、智能喷药机器人运行参数、喷洒作业参数等[11 ]。②基于物联网技术的通信系统构建。各软件系统之间的数据通信,及人机界面与核心控制器之间的數据通信(注:遥控驾驶方案无人机界面与核心控制器之间的通信)。③控制程序的编写。根据气象环境数据,判别是否适合喷洒作业[12 ]。据图像识别技术的判别结果,选择农药种类,打开对应通道的电磁阀,启动喷洒泵,调整喷头机构,进行农药喷洒作业,并适时优化喷洒距离、喷洒速度、喷洒时间,实现设计预想的喷洒效果。④数据呈现及上位机操控功能实现。通过人机界面(注:遥控驾驶方案无人机界面),呈现智能喷药机器人的作业环境数据、运行参数及操作人员对喷洒车的远程操控功能的实现[12 ]。
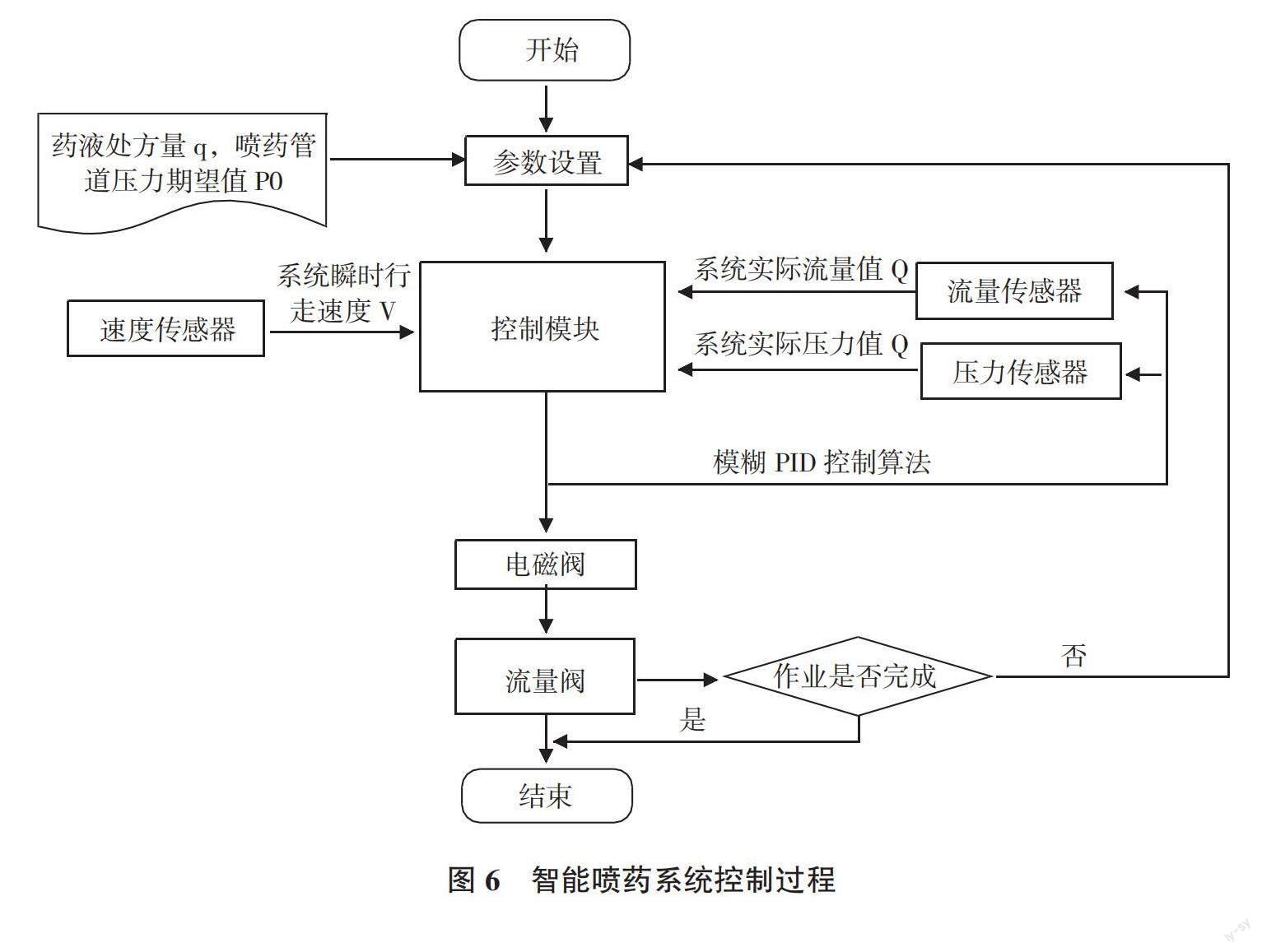
2.3.3 喷药控制系统参数的控制与调节 本设计的智能机器人喷药系统主要由药箱、变频泵、药液输送管道、流量传感器、压力传感器、速度传感器及控制模块等部分组成。根据病虫害种类及密度等信息处理结果通过压力传感器及流量传感器调节管道中药液的压力和流量,进而控制喷药浓度[13 ]。为了提高控制精度,该系统中的控制模块采用PLC控制器,用于接收速度传感器、流量传感器及压力传感器采集的信号,从而控制变频泵及流量阀,最终实现送药管道的流量动态控制。智能控制过程如图6所示:
3 应用效果
3.1 喷药效果
2023年6月中旬,在武威市凉州区、古浪县大棚内进行对智能喷药机器人进行喷药量实验和雾滴沉积量试验。该试验对同1行植株的喷药量和人工喷雾进行比较[14 ]。喷药机两边共14个防滴漏喷头,喷嘴可喷角度为105°,用自来水代替混合药液[15 ]。本喷药系统为自动变量喷药,通过在进液管和回流管上个安装1个流量传感器,即可测量出实际喷药量。为了试验的准确性,试验时分别设计3个行驶速度对同1组植株连续测试3次,试验距离为50 m。相比于传统均匀喷施,变量喷施能够有效减少农药的使用[16 ],其原因是在无须喷药的种植间隙,控制系统会关闭阀门,从而减少无效的喷施。而在有植株存在时,控制系统能够根据植株的生长情况及病虫害情况调整喷药量的大小,对于个体较小的植株也能够减少喷药量,从而能够在不降低喷施效果的前提下达到节约农药使用的效果。
3.2 样机行走效果
通过手机远离机器人的方式测试手机远程控制距离,测试距离由近及远,试验发现在手机直线距离远离机器人50 m以上,手机控制机器人信号传输不稳定[17 ]。用手机控制喷药机器人转置最大转向角,以2 km/h速度分别向左、向右各转4圈,以喷药机器人中心线的中点为转弯半径的参考点[2 ]。试验结果表明,机器人样机控制相对灵活,最小转弯半径为1.8 m,向左向右转向基本一致,可实现平稳直行、转弯等动作。
4 应用建议
设计的智能农药喷洒机器人可以实现远程遥控作业,可以减轻农户劳动强度,改善喷药作业环境。农户喷洒农药应尽可能采用智能喷药设备进行,可以节约农药,避免农户长时间作业身体受到侵害。应用建议如下,一是农户在喷药作业时最大遥控作业不超过50 m;二是喷药机器人的最小转弯半径为1.8 m;三是喷药机器人以2 km/h在田间作业除草作业间距双侧约8 m。样机控制灵活,喷雾效果好,在以后的田间作业中充分改进优化智能喷药机器人多项关键技术,精准喷洒农药,提高作业效率。
该智能喷药机器人设计通过融合人工智能、无人机和传感器等技术,实现了农药施用的自动化和精准化,有效提高了喷药效果和农作物产量,并减少了对环境和人类健康的潜在风险。下一步针对喷药过程中智能喷药机器人运行的平稳性、根据作物生长态势精准靶向喷药及喷药效率做进一步优化,增加喷药自动升降及转向装置、增大喷药射程以适应更远的喷洒距离。
参考文献:
[1] 刘 勇,徐识溥,胡雯雯,等. 基于Wi-Fi的农业环境数据远程监控系统研究[J]. 上海农业学报,2021,37(4):140-146.
[2] 谭 洁,刘 震,唐雪刚,等. 基于物联网技术的智能农药喷洒机器人的设计[J]. 物联网技术,2022,12(5):138-140.
[3] 赵建柱,宗玉峰,王枫辰,等. 基于机器视觉技术的大棚农作物喷药机器人[J]. 广东水利电力职业技术学院学报,2022,20(13):28-32.
[4] 师五喜,姜万蕾,李宝全. 输入受限轮式移动机器人轨迹跟踪控制[J]. 天津工业大学学报,2022,41(5):73-78.
[5] 汪先超. 多AGV系统的组合导航控制与调度方法研究[D]. 大连:大连理工大学,2016.
[6] 张学峰,王仕仪,刘 傲,等. 基于ROS的室内导航配送机器人设计[J]. 现代信息科技,2022,6(12):159-164.
[7] 牛文琦. 基于深度学习的多功能自主导航农业机器人的研制[D]. 銀川:北方民族大学,2021.
[8] 张连滨,葛浙东,刘传泽,等. 杆状物攀爬机器人关键技术综述[J]. 计算机测量与控制,2018,26(1):1-5.
[9] 张成远. 自走式喷杆喷药机喷杆平衡与变量喷药系统设计及试验[D]. 北京:中国农业机械化科学研究院,2022.
[10] 关桂娟. 农用喷药机的电控系统功能及技术优化方向[J]. 农机使用与维修,2022(8):69-71.
[11] 王万军,贾秋珍,曹世勤,等. 15%三唑酮喷施次数对小麦条锈病的防治效果[J]. 寒旱农业科学,2023,2(5):464-467.
[12] 石新丽,赵墨然,李海川,等. 基于图像处理的玉米害虫种类识别系统研究[J]. 农业与技术,2021,41(12):28-31.
[13] 谭 静,刘莉滋. 施肥喷药机械装备在农业生产中的现状及发展趋势[J]. 南方农机,2023,54(15): 69-71;78.
[14] 王炯锡,胡天让,陈立涛,等. 基于PLC的小型智能喷药机控制系统的研究[J]. 南方农机,2023,54(11):53-56.
[15] 周 通,李 雯,左小林. 果园喷药机智能管控平台的建设研究[J]. 农业装备与车辆工程,2023,61(1):23-27.
[16] 靳文停,葛宜元,张闯闯,等. 履带式温室智能喷药机器人的设计[J]. 农机使用与维修,2019(1):8-11.
[17] 马志凯,赵达卫,霍 倩,等. 田间智能喷药车的设计与试验研究[J]. 农机化研究,2021,43(10):259-263.
猜你喜欢
绿色科技(2017年1期)2017-03-01 11:17:26
中国科技博览(2016年19期)2016-10-19 14:58:22
电脑知识与技术(2016年21期)2016-10-18 22:33:02
科技视界(2016年20期)2016-09-29 10:53:22
环球时报(2016-08-01)2016-08-01 07:04:45
商场现代化(2016年10期)2016-05-13 19:00:09
安徽农学通报(2015年23期)2015-12-25 00:31:11
安徽农学通报(2015年11期)2015-06-22 10:59:42
