
单CT配置方式下线路末端故障快切风险分析及解决方案
2023-10-09 06:38:36高逸舟
通信电源技术 2023年16期
高逸舟
(国网湖北省电力有限公司谷城县供电公司,湖北 谷城 441700)
0 引 言
随着电力系统的发展和智能化程度的提升,人们对电力系统运行的安全性和可靠性要求日益提高。在电力系统中,故障快切的处理是保证系统安全运行的重要环节之一[1]。传统的故障快切方案需要对不同的线路末端单独配置电流互感器(Current Transformer,CT),以快速切除线路末端故障。然而,这种方式在成本和工程实施方面存在一定问题[2,3]。文章针对单CT配置方式下线路末端故障快切风险进行分析,并提出解决方案。通过定值优化和跳位加速逻辑的设计,有效降低故障快切的风险,提高整个系统的保护可靠性。
其中,定值优化是根据系统的特点和需求,对判据定值进行优化调整,使故障切除的动作能够更准确地定位故障。通过对系统参数和工作条件的分析,结合求解优化问题的方法,得到最优的定值配置方案[4]。跳位加速逻辑是在故障快切触发后,通过设计合理的跳位判据和快速切除逻辑,缩短故障切除时间。通过联合检测电流和电压,建立故障参考模型,可缩短故障切除时间,提高系统的保护可靠性[5]。
1 单CT配置线路线末故障快切风险分析
单CT配置方式如图1所示。线路间隔断路器仅配置了一只CT。为避免断路器与CT间发生故障,线路保护跳开断路器后仍然无法切除故障,要求CT必须安装在断路器靠线路侧。单CT配置方式下,为避免线路保护与母线保护范围出现死区,要求线路保护和母线保护交叉使用CT绕组,即母线保护使用CT靠线路侧保护绕组,线路保护使用CT靠母线侧保护绕组,从而实现保护范围交叉,消除保护死区。
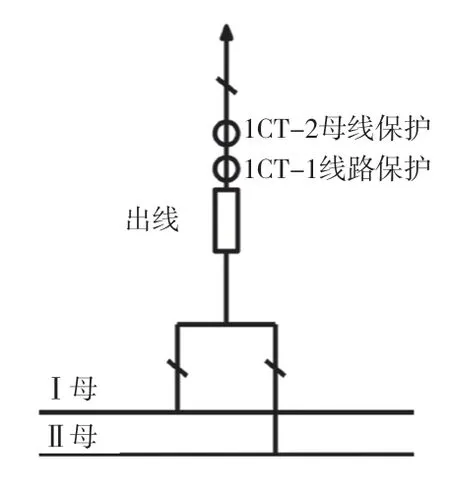
图1 线路间隔典型单CT配置方式
传统的继电保护系统中,通常使用2个互为备份的CT来快速切除线路末端故障。然而,在某些情况下,由于一些特殊的限制或者经济因素,只能采用单CT配置方式,如图2所示。单CT配置方式下的线路末端故障快切存在一定风险。由于只有一个CT进行电流采集,当该CT发生故障或失效时,将无法正常检测到故障电流,从而导致保护系统的失效。另外,由于只有一个CT提供电流信息,容易受到负荷变化、电压波动等因素的影响,引起保护误动作或漏动作的问题。为解决这些问题,引入跳位加速逻辑,即在检测到故障时,通过比较故障电流的大小和方向判断故障位置,并采取相应的保护动作。这种逻辑可以加快保护系统的响应速度,减少误动作的可能性。此外,需要进行防误动特性分析。通过分析单CT配置方式下的故障情况,确定误动作的原因和特点,制定相应的防护措施,确保保护系统的可靠性和稳定性。

图2 单CT配置保护范围
2 解决方案
当前的电网运行规程并未充分考虑单CT配置带来的线路末端故障快切风险,系统运行方式和整定原则仍存在一定的优化空间,线路保护也未针对此类故障设计快速切除逻辑[6,7]。文章从优化运行管理和完善保护逻辑2个维度研究解决方案。优化运行管理解决方案主要从电网运行方式和整定原则2个方面实施,而完善保护逻辑方案主要在发生故障时通过快速保护动作逻辑切除故障来降低风险。
2.1 运行管理优化措施
2.1.1 电网运行方式优化
第一,复电操作顺序优化。单CT侧往双CT侧充电的过程如图3所示。首先,复电操作顺序的优化应考虑故障的位置。当线路K点发生故障时,可通过充电过流保护以较快速度切除故障。在复电时,可以先恢复离故障点较近的支路,以便尽快恢复该支路的供电。这样可以缩短用户的停电时间,减少对用户的影响。其次,复电操作顺序的优化要考虑供电范围。如果单CT侧充电后故障点在单CT范围外但位于线路保护范围内,可由线路差动保护快速切除故障,先恢复重要用户的供电,然后逐渐扩展到其他用户。这种方式可以保证供电的优先级,确保重要用户得到及时供电。最后,复电操作顺序的优化还要考虑系统的稳定性。在进行复电操作时,应合理控制复电速度,避免短时间内大规模复电导致系统不稳定。采取逐级复电、分段复电的方式,逐步将线路引入系统,有助于确保系统的稳定运行。

图3 单CT侧往双CT侧充电
第二,系统断点位置优化。通过对线路故障类型、故障位置以及故障电流等参数进行研究,可合理选择系统断点位置。对于容易发生故障的部位,应优先设置系统断点,以快速切除故障点,减少对整个系统运行的影响。此外,充分利用现有的监测和控制技术来支持系统断点位置优化。通过实时监测系统的电流、电压等参数,结合保护设备的动作情况,及时判断故障点位置,并进行相应的切除操作,有效降低故障快切风险。利用自动化控制技术,实现对系统断点位置的智能判断和调整,提高系统的自动化程度与运行效率。
2.1.2 整定原则优化
在单CT配置方式下,为了降低线路末端故障快切风险,需要优化保护装置的整定原则。整定原则是根据电网的特点和设备的参数来确定保护装置的整定参数,确保保护装置能够准确检测和切除故障[8]。
第一,优化保护装置的动作时间。动作时间是保护装置从检测到故障发生到切除故障的时间。在单CT配置方式下,由于不能同时检测线路两端的电流,需要通过优化整定原则来减少动作时间。采用经验公式或者模拟计算的方法,可确定合适的动作时间范围。实际应用中,还可以根据运行经验和设备状态来进一步优化动作时间。
第二,优化保护装置的灵敏度。灵敏度指保护装置对故障信号的检测能力。在单CT配置方式下,由于只能检测到一侧的电流,需要通过优化整定原则来提高保护装置的灵敏度。通过调整整定参数,如电流阈值和时间延迟等,来提高保护装置对故障信号的检测能力。同时,考虑设备的参数变化和噪声的影响,确保保护装置的灵敏度能够满足实际应用需求。
第三,优化保护装置的稳定性。稳定性是保护装置在正常工作条件下不发生误动的能力。在单CT配置方式下,由于只能检测到一侧的电流,需要通过优化整定原则来提高保护装置的稳定性。通过调整整定参数,如时间延迟和灵敏度等,来减少误动的概率。同时,考虑设备的参数变化和系统的运行状态,确保保护装置的稳定性能够满足实际应用需求。
第四,验证和优化整定原则。实际应用中,可以通过模拟计算、实验验证以及运行监测等方法验证和优化整定原则。通过与实际故障的比对和分析,进一步优化整定原则,提高保护装置的性能。
2.2 保护动作逻辑完善
2.2.1 跳位加速逻辑
跳位加速逻辑是一种用于单CT配置方式下线路末端故障快切的解决方案。传统的单CT配置方式中,由于只有一个CT对线路进行保护,当线路末端发生故障时,需要经过一系列的判断和计算才能确定故障位置,并触发保护动作。这个过程会有一定的时间延迟,导致故障处理不及时,对电网的稳定性和安全性造成影响。为解决这个问题,引入跳位加速逻辑。跳位加速保护本侧逻辑和跳位加速保护对侧逻辑分别如图4和图5所示。
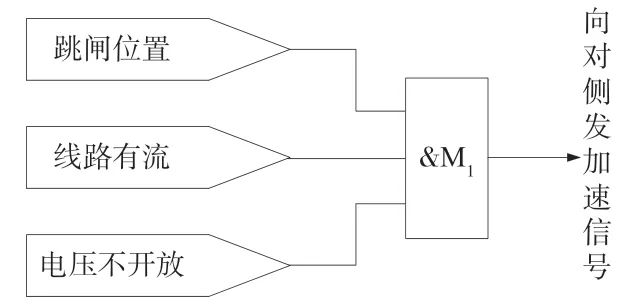
图4 跳位加速保护本侧逻辑

图5 跳位加速保护对侧逻辑
当线路末端发生故障时,故障电流会通过线路上的电阻和电感元件流向线路的起点;而在故障发生位置之前的线路上,由于没有故障电流的注入,电压波形会与正常情况下的波形有所不同。因此,通过检测线路上电压波形的变化,可以间接判断故障位置。
2.2.2 防误动特性分析
在发生故障时,保护装置能够正确判断故障的类型和位置,避免虚假动作或误动作。针对单CT配置方式下的防误动问题,可以采取以下措施。
第一,信号滤波。通过对电流、电压等信号进行滤波处理,消除干扰信号对保护装置的影响,提高保护装置的判断准确性。常用的滤波方法有低通滤波、高通滤波以及带通滤波等。
第二,整定参数优化。合理设置保护装置的整定参数,确保在正常工作条件下能够灵敏检测故障,而不受外界因素的影响。
第三,加强逻辑判断。改进保护装置的逻辑判断算法,提高对故障类型的识别能力。引入多重判断逻辑,通过对不同信号的综合分析,提高故障判断的准确性。同时,根据历史故障数据进行训练,建立故障模型,进一步提高判断精度。
3 结 论
通过对单CT配置方式下线路末端故障快切风险的分析及解决方案的研究,为电力系统中故障快切问题的解决提供新的思路和方法。通过定值优化和跳位加速逻辑的设计,有效降低故障快切的风险,提高系统的故障处理能力和保护可靠性。
猜你喜欢
法律方法(2022年2期)2022-10-20 06:44:24
中学生百科·大语文(2021年11期)2021-12-05 14:27:54
纺织科学研究(2021年7期)2021-08-14 01:42:34
建材发展导向(2019年5期)2019-09-09 09:25:10
电子制作(2018年12期)2018-08-01 00:48:08
37°女人(2017年11期)2017-11-14 20:27:40
现代工业经济和信息化(2016年19期)2016-05-17 05:38:21
设备管理与维修(2016年6期)2016-03-16 02:21:58
电测与仪表(2015年2期)2015-04-09 11:29:24
河南科技(2014年15期)2014-02-27 14:12:26
