
基于RobotStudio的机器人搬运码垛虚拟仿真平台
2023-10-08 12:20邓华军段月红卢培文
自动化与信息工程 2023年1期
邓华军 段月红 卢培文

本文引用格式:邓华军,段月红,卢培文.基于RobotStudio的机器人搬运码垛虚拟仿真平台[J].自动化与信息工程,2023,44(1): 27-32.
DENG Huajun, DUAN Yuehong, LU Peiwen. Virtual simulation platform for robot handling and palletizing based on RobotStudio[J]. Automation & Information Engineering, 2023,44(1):27-32.
摘要:以机器人搬运码垛平台为研究对象,通过SolidWorks软件建立该平台的三维模型;利用RobotStudio软件设计动态物料输送链、动态快换工具和动态真空吸盘3个Smart组件,分别用于模拟机器人搬运码垛平台的物料运动、吸取/释放物料和装载/卸载吸盘,并虚拟仿真机器人搬运码垛的工作过程。仿真结果表明:该虚拟仿真平台可以准确地模拟机器人搬运码垛平台的动态效果,顺利地完成预定的工作程序,达到与真实平台相同的搬运码垛效果。
关键词:RobotStudio;机器人搬运码垛平台;Smart组件;虚拟仿真平台;SolidWorks
中图分类号:TP249 文献标志码:A 文章编号:1674-2605(2023)01-0005-06
DOI:10.3969/j.issn.1674-2605.2023.01.005
Virtual Simulation Platformfor Robot Handling and Palletizing Based on RobotStudio
DENG Huajun DUAN Yuehong LU Peiwen
(Ganzhou Polytechnic, Ganzhou 341000, China)
Abstract:Taking the robot handling and palletizing platform as the research object, the three dimensional model of the platform is established by SolidWorks software; Use RobotStudio software to design three Smart components: dynamic material conveying chain, dynamic quick-change tool and dynamic vacuum suction cups, which are respectively used to simulate the material movement, material absorption/release and loading/unloading suction cups of the robot handling palletizing platform, and to simulate the working process of the robot handling palletizing. The simulation results show that the virtual simulation platform can accurately simulate the dynamic effect of the robot handling and palletizing platform, and successfully complete the predetermined work procedure, achieving the same handling and palletizing effect as the real platform.
Keywords:RobotStudio; robot handling and palletizing platform; Smart component; virtual simulation; SolidWorks
0 引言
搬运码垛是机器人的一个典型应用场景,约40%的机器人被用于柔性搬运、码垛、传送等场合[1]。传统的示教编程方法存在精度不高、效率较低等问题。借助虛拟仿真技术建立机器人虚拟仿真平台,不仅可以快捷、方便地调试程序,还可以多角度地观察机器人的运行情况。另外,随着职业教育的发展,以工业机器人为代表的自动化实训平台被广泛应用于实验
实训教学。但由于工业机器人相关实训设备价格昂贵、数量较少,制约了技能型人才的培养。虚拟仿真平台不仅可以优化教育资源,还可以将技能大赛的成果高效地转化为实际教学,提高人才培养的质量[2-3]。
本文利用三维建模软件SolidWorks建立机器人搬运码垛虚拟仿真平台设备的三维模型,并为模型设置材质和外观,使模型最大程度地反映真实设备;利用高效离线编程软件RobotStudio[4]的Smart组件设计动态物料输送链、动态快换工具和动态真空吸盘,使机器人搬运码垛虚拟仿真平台具有真实平台的效果,模拟机器人搬运码垛平台的工作过程。
1 虚拟仿真平台搭建
1.1 平台三维模型建立
本文以全国职业院校技能大赛机器人技术应用项目竞赛设备为基础[5],分离出机器人搬运码垛平台。利用三维建模软件SolidWorks建立机器人搬运码垛虚拟仿真平台中的工作台、快换工具、真空吸盘、吸盘支架、物料取料架、物料放料架等设备的三维模型。这些设备的三维模型可直接导入RobotStudio,搭建虚拟仿真平台,提高设计效率。通过设备间的通讯连接,实现机器人搬运码垛的工作过程。
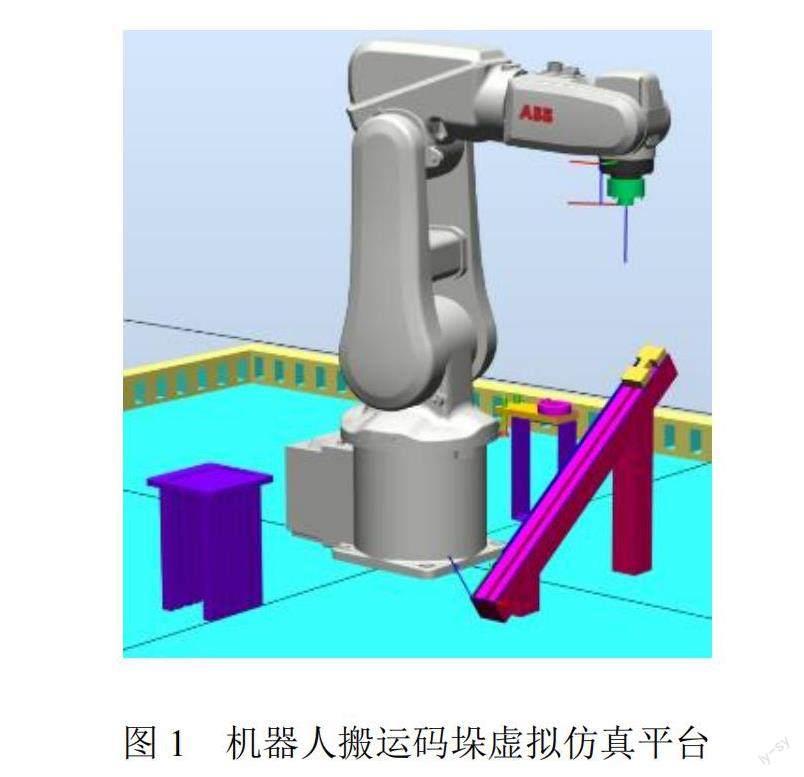
机器人搬运码垛平台采用ABB IRB120型工业机器人[6-7]。建立机器人搬运码垛虚拟仿真平台时,首先,从RobotStudio<基本>功能选项卡中的ABB模型库直接导入该型号工业机器人;然后,其他设备利用SolidWorks建立与真实设备一致的模型,并导入RobotStudio中;最后,通过修改设备模型的位置,完成虚拟仿真平台的布局,如图1所示。
1.2 工具坐标系的创建
为方便目标点位的示教,将工具中心点(tool center point,TCP)轉移到工具末端,并在工具末端自动生成工具坐标系。首先,创建1个快换工具Tool1,将框架原点设置在快换末端的中心处,方便捕捉真空吸盘的装载/卸载位置;然后,创建1个真空吸盘工具Tool2,将框架原点设置在真空吸盘末端的中心处,方便物料拾取/释放位置的示教。
1.3 工件坐标系的创建
物料取料架导轨是一个与水平面成35°的斜面,三维模型如图2所示。为方便用户手动控制机器人规划路径、编写程序,以物料取料架为基准创建1个工件坐标系。采用三点法标定工件坐标系Wobj1,如图3所示。该坐标系的原点在物料取料架底端顶点处,X轴与物料取料架底面的边重合,Y轴与物料取料架斜面上的边重合,Z轴与物料取料架斜面垂直。
2 Smart组件的设计
2.1 动态物料输送链S_InFeeder
机器人搬运码垛平台在实际工作时,人工将物料放置在取料架顶端;在重力作用下,物料沿斜面导轨滑落至取料架底端;机器人控制真空吸盘将物料吸走,依次循环。在机器人搬运码垛虚拟仿真平台中物料无重力,无法自由滑落到取料架底端。为达到与真实平台相同的动态效果,利用RobotStudio软件中的Smart组件设计一个动态物料输送链S_InFeeder。动态物料输送链S_InFeeder的动态效果主要包括:在取料架顶端自动生成物料;物料沿着斜面导轨斜向下运动;物料到达取料架底端后停止运动;物料被真空吸盘吸走后,在取料架顶端再次生成物料,依次循环[8-9]。
动态物料输送链S_InFeeder的创建过程:先新建1个Smart组件并命名为S_InFeeder;再依次创建Source、Queue、LinearMover、PlaneSensor和LogicGate 5个子对象组件。
首先,添加子对象组件Source,其属性选择为“物料”。每触发一次Source的Execute信号,就会自动生成1个物料复制品。
然后,添加子对象组件Queue,其属性保持默认,将物料复制品加入队列中。
其次,添加子对象组件LinearMover。为保证物料沿斜面导轨作线性运动,设计线性运动参考坐标系Reference,即框架_3,其坐标方向与工件坐标系Wobj1一致,如图3所示。LinearMover组件的运动方向为框架_3的Y轴负方向。
再次,添加子对象组件PlaneSensor。在取料架底端挡板处设置1个面传感器,用于检测物料是否到位。
最后,添加子对象组件LogicGate。通过创建1个非门逻辑运算,实现面传感器信号由1变为0时,触发Source的Execute信号[10]。
对象组件设计完成后,创建S_InFeeder组件的属性和连结,如表1所示。
通过表1所示的属性和连结,实现当触发入列动作时,物料的复制品自动加入队列Queue,并作线性运动;当触发出列动作时,物料的复制品自动退出队列Queue,并停止线性运动。
创建1个数字输入信号DIStart,用于触发Source的Execute信号,即启动S_InFeeder输送链。创建1个数字输出信号DOArrive,作为物料到位反馈信号。建立S_InFeeder组件的I/O信号和连接,如表2所示。
S_InFeeder组件的工作过程为:输入信号DIStart触发Source的Execute信号,使其产生1个物料复制品;物料复制品触发Queue的入列动作,并沿斜面导轨作线性运动;物料复制品与面传感器接触后,触发Queue的出列动作,并将物料到位反馈信号置1;通过非门连接触发Source的Execute信号,当物料复制品出列后,自动触发Source再产生1个物料复制品。
2.2 动态快换工具S_Hand
动态快换工具的动态效果主要包括:机器人控制快换工具从吸盘支架上装载真空吸盘;机器人控制快换工具在吸盘支架上卸载真空吸盘;自动置位/复位真空反馈信号[11]。
动态快换工具S_Hand的创建过程:首先,新建1个Smart组件并命名为S_Hand;然后,将快换工具Tool1添加到S_Hand组件,设定为角色Role,使S_Hand组件具有工具属性;最后,将S_Hand组件安装到机器人上,依次创建LineSensor、Attacher、Detacher、Logicgate[Not]和LogicgateSRLatch 5个子对象组件。
首先,添加子对象组件LineSensor。创建1个线传感器并将其安装到快换工具上。该传感器位于快换工具与真空吸盘的接触面上,用于检测真空吸盘的到位状态。
然后,添加子对象组件Attacher。设定Attacher的父对象为快换工具,子对象为真空吸盘,实现快换工具装载真空吸盘的动作效果。
接着,添加子对象组件Detacher。设定Detacher的子对象为真空吸盘,实现快换工具卸载真空吸盘的动作效果。
最后,添加逻辑信号子对象组件Logicgate[Not]和LogicgateSRLatch。其中,Logicgate[Not]实现数字输入信号S_DIHand由1变为0时,触发快换工具卸载真空吸盘动作;LogicgateSRLatch用于触发真空反馈信号S_DOVacuum1的置位/复位动作。
在机器人搬运码垛虚拟仿真平台中,利用S_ Hand窗口的<设计>选项卡添加线传感器和Attacher之间的连结、Attacher和Detacher之间的连结,以保证快换工具上的线传感器能检测到真空吸盘。S_Hand组件的属性和连结如表3所示。
创建I/O信号之间的连接关系:首先,创建1个数字输入信号S_DIHand,用于触发装载/卸载动作;然后,创建1个数字输出信号S_DOVacuum1,用于触发快换工具的真空反馈信号;接着,建立各子对象组件之间的I/O连接,如表4所示;最后,实现快换工具装载/卸载真空吸盘的动作执行,并反馈真空信号。
2.3 动态真空吸盘S_Sucker
动态真空吸盘的动态效果主要包括:机器人控制真空吸盘从物料取料架上拾取物料;机器人控制真空吸盘在物料放料架的指定位置释放物料;可以自动置位/复位真空反馈信号。
动态真空吸盘S_Sucker与动态快换工具S_Hand的设计方法、属性和连结方法类似,属性和连结参考表3。不同的是:S_Sucker的线传感器安装在真空吸盘末端,用于检测物料的到位状态;子对象组件Attacher和Detacher的子对象Child无需直接指定,而是通过属性和连结来关联物料复制品。
创建1个数字输入信号S_DISucker,用于触发真空吸盘的拾取/释放动作。创建1个数字输出信号S_DOVacuum2,用于触发真空吸盘的反馈信号。与S_Hand组件中的信号和连接类似,创建S_Sucker组件中各子对象组件之间的I/O连接,实现真空吸盘拾取/释放物料动作的执行,并反馈真空信号。
3 平台整体设计
3.1 工作流程
机器人搬运码垛虚拟仿真平台的工作流程如图4所示。
首先,机器人从工作原点出发,运动到吸盘支架装载真空吸盘;然后,控制真空吸盘运动到物料取料架吸取物料,并将其释放在物料放料架的指定位置;接着,机器人完成6个物料的搬运码垛工作,垛型如图5所示,并将真空吸盘卸载在吸盘支架上;最后,机器人回到工作原点,完成搬运码垛的工作流程。
3.2 机器人I/O信号的创建
根据机器人搬运码垛虚拟仿真平台创建机器人控制系统System5。RobotStudio软件的控制器状态变为绿色,此时虚拟仿真平台具有与真实平台相同的功能,可在虚拟示教器中配置参数、设计运行程序等。
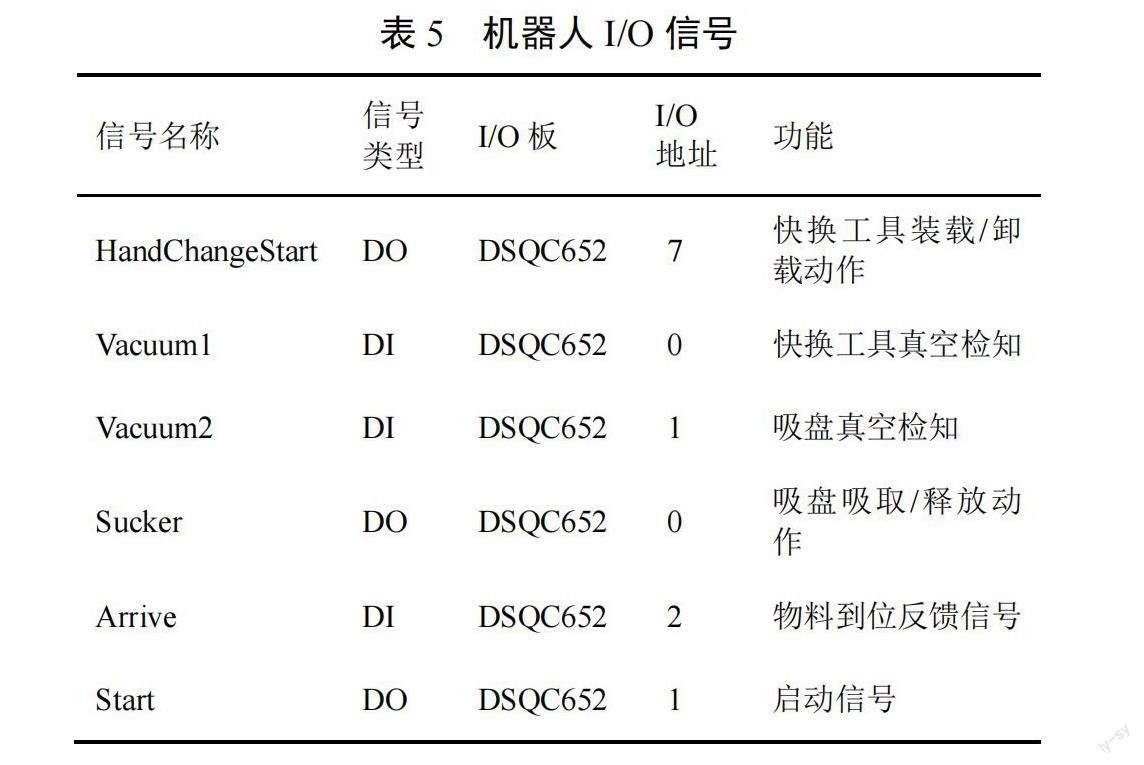
在虚拟示教器的控制面板中,先创建DSQC652標准I/O板,地址为10;再配置机器人的I/O信号,如表5所示。
3.3 工作站逻辑设计
工作站逻辑设计是指将机器人端的I/O信号与Smart组件端的I/O信号进行连接,实现信号交互[12]。利用<仿真>功能选项卡中的<工作站逻辑>控件,建立机器人与S_InFeeder、S_Hand、S_Sucker 3个Smart组件之间的信号连接。
3.4 程序设计
根据机器人搬运码垛虚拟仿真平台的工作流程,设计1个主程序和3个子程序。3个子程序分别为装载真空吸盘程序、搬运码垛程序、卸载真空吸盘程序。通过主程序调用该3个子程序,完成整个工作流程。在程序编写之前,利用RobotStudio的“同步”功能,将创建的工具数据、工件数据同步到RAPID,方便程序的后续处理。利用虚拟示教器创建1个一维数组Position{6}来存放6个物料的放置点位置数据,利用for循环来实现6个物料的循环搬运码垛。
主程序格式如下:
PROC MAIN() 主程序
GetTool; 调用装载真空吸盘程序
MA_D; 调用搬运码垛程序
PutTool; 调用卸载真空吸盘程序
ENDPROC
4 仿真结果分析
程序编写和点位示教完成后,首先,利用RobotStudio<仿真>功能选项卡中的控件,启动动态物料输送链S_InFeeder的动画仿真;然后,在虚拟示教器中启动主程序进行机器人搬运码垛虚拟仿真平台工作流程的仿真测试,运行效果如图6所示。
由图6可知,机器人搬运码垛虚拟仿真平台中的机器人能够按照程序的要求完成規定的搬运码垛工作,即虚拟仿真平台中的物料可以按要求沿斜面导轨线性运动到底端挡板处停止,待机器人控制真空吸盘吸走底端物料后,再自动生成1个物料做相同的线性运动至底端挡板处停止。这一过程模拟了机器人搬运码垛平台中,物料依靠重力从物料架顶端自由滑落到底端的过程。机器人搬运码垛虚拟仿真平台中的机器人快换工具可以根据程序要求顺利地装载/卸载真空吸盘。这一过程模拟了机器人搬运码垛平台中,机器人自动装载/卸载真空吸盘的过程。机器人搬运码垛虚拟仿真平台中的机器人控制真空吸盘可以顺利地吸取/释放物料,并按程序要求码好相应的垛型。这一过程模拟了机器人搬运码垛平台中,机器人搬运码垛物料的过程。综上所述,机器人搬运码垛虚拟仿真平台达到了真实平台搬运码垛的效果,可代替真实平台进行程序编写和调试。
5 结束语
本文利用RobotStudio建立了机器人搬运码垛虚拟仿真平台,并设计了动态物料输送链、动态快换工具和动态真空吸盘3个Smart组件,模拟了机器人搬运码垛平台中物料运动、装载/卸载吸盘和吸取/释放物料的动态效果;建立了机器人I/O信号和3个Smart组件I/O信号之间的连接;利用虚拟示教器设计了机器人搬运码垛6个物料的程序,实现了机器人搬运码垛平台工作过程的仿真。为仿真试验平台的设计和开发提供了新思路和可行性依据。
参考文献
[1] 叶晖.工业机器人典型应用案例精析[M].2版.北京:机械工业出版社,2022.
[2] 郝翠霞,叶晖.基于Smart组件的工业机器人码垛仿真设计[J].自动化技术与应用,2018,37(8):63-66.
[3] 何剑敏,羊荣金,沈孟锋.基于RobotStudio的智能制造单元实验平台仿真设计[J].实验技术与管理,2022,39(3):99-104.
[4] 叶晖.工业机器人工程应用虚拟仿真教程[M].2版,北京:机械工业出版社,2021.
[5] 李海胜,田东亮,黄俊杰.工业机器人技术及应用[M].上海:同济大学出版社,2019.
[6] 张春芝,钟柱培,许妍妩.工业机器人操作与编程[M].北京:高等教育出版社,2018.
[7] 王晓勇,武昌俊,许妍妩.工业机器人工作站操作与应用[M].北京:高等教育出版社,2021.
[8] 李福武,黎昌南.工业机器人码垛工作站的设计与仿真[J].工业技术创新,2021,8(6):19-24;40.
[9] 李志梅.基于RobotStudio的机器人夹具动态更换系统仿真设计[J].机电工程技术,2021,50(12):122-126.
[10] 郝建豹,许焕彬,林炯南.基于RobotStudio的机器人码垛工作站虚拟仿真设计[J].自动化与信息工程,2017,38(2):26-29.
[11] 郝建豹,林子其,吴新丽.基于RobotStudio的异形轴加工生产线仿真设计[J].制造技术与机床,2020(9):83-87.
[12] 周谦.工业机器人离线编程及其在光纤激光加工平台中的应用[D].青岛:山东科技大学,2010.
作者简介:
邓华军,男,1988年生,硕士,讲师,主要研究方向:机电一体化技术。E-mail: 724631005@qq.com
