
渡槽安全评估中空地点云融合方法应用研究
2023-10-07 02:29:06丁国章胡栋辉吉顺文何朝辉
浙江水利科技 2023年5期
丁国章,胡栋辉,吉顺文,何朝辉,来 晟
(1.浙江省水利河口研究院(浙江省海洋规划设计研究院),浙江 杭州 310017;2.余姚市水利局,浙江 余姚 315400;3.浙江广川工程咨询有限公司,浙江 杭州 310020)
0 引 言
渡槽是南水北调工程中重要的交叉建筑物[1],数十年来,渡槽在华东南部山区乡村供水、农田灌溉发挥着重要的调度作用,滋养着山区宝贵的农田,造福沿途的百姓[2]。但是,渡槽这样的水利设施多建于20世纪70年代左右[3],距今已达50 a之久,受到气候、氧化、腐蚀等因素的影响而自然老化,在长期静载或地震荷载作用下,强度和刚度均已降低[4-5]。历经几十年的风雨,原来渡槽之下的原野已不复存在,被繁华的新时代农村代替,为了推进水利高质量发展及保障乡村振兴的基础设施建设,科学高效的渡槽安全评估工作迫在眉睫[6-7]。
1 一般评估方法
渡槽安全检测主要有外观质量、形变、混凝土强度、碳化深度、钢筋保护层厚度等多个项目。本文主要讨论的是渡槽形变评估中点云融合方法的研究,一般形变评估的方法是目测观察外立面,再结合皮尺、全站仪量测。具体做法:人工巡查渡槽周身,备注隐患处,利用皮尺和全站仪进行测量,获得渡槽部分参数,与设计值进行比较,得到形变偏差值。这种方法有几个弊端:①人工目测寻找隐患处,凭借个人经验,容易缺漏;②皮尺和全站仪的测量,属于点状测量,覆盖范围有限,反应的参考值比较局限;③人工巡查和常规测量的人力和时间成本都比较高。
2 点云评估方法
三维激光在测绘领域的成熟应用已经得到广泛的认可,在水利工程的安全检测方面也得到推广应用[8-9]。对于渡槽而言,机载Lidar、架站式三维扫描、背包式三维扫描都可以作为数据采集方式。①机载Lidar:对于长距离的渡槽而言,作业效率高,覆盖范围广,不受地形限制,自带RTK模块的信号也不受影响,但是,激光点的密度一般,渡槽底部盲区无法覆盖。②架站式三维扫描:对于结构复杂的渡槽而言,点云密度高,分辨率高,但是,作业效率低,多站式的拼接需要借助标靶球实现精确拼站,增加工作量,另外,渡槽顶部亦无法覆盖扫描。③背包式三维扫描:可以实现边巡查边扫描,操作灵活便捷,点云密度处于机载Lidar与架站式三维激光之间。
综上所述,兼顾效率和质量,本次选择机载Lidar和背包式三维激光联合作业。由飞手操作M300飞行器按照预定航线采集覆盖渡槽的Lidar数据,另一技术员背负R8,按照“S”型绕渡槽槽墩全过程采集slam激光数据。数据处理按照解算、去噪、匹配、赋色的步骤分别得到2种作业方式的点云成果数据。作业设备见表1和图1。

表1 作业设备清单
3 空地融合的方式
点云的格式较多,从压缩度和多平台应用的角度,las格式的通用性较强。市面上,激光雷达设备诸多,各家硬件厂商均有各自的内部解算方法,第一时间采集的数据是不能够直接使用的,需要通过各自硬件匹配的软件进行数据结算,然后输出为统一的数据格式,如“*.las”。
机载Lidar与地面站的点云融合可以有几种方式,像控法、云匹配法(cloud to cloud)、同一坐标系法。
3.1 像控法
在作业准备阶段,渡槽周边布设4个以上的地面像控点,尽可能完全的包围渡槽,像控点标志明显,选址视野开阔,无遮挡,边缘锐利,大小符合作业标准。
无人机和背包式三维激光扫描作业时,确保激光扫描范围覆盖像控点,比如像控点为Pi=(xi,yi,zi)(i=1,2,3,4),根据空间定位几何基础原理,机载Lidar扫描的渡槽体视为空间A,背包式扫描的渡槽体视为空间B,为了确保空间A与空间B的重合,即通过像控点可以确定空间A和空间B中的随机点O(x0,y0,z0)为同一个空间的点,节点Pi与随机点O之间的距离为Di,换句话说就是由像控点确定的随机点都只有唯一性,见图2。

图2 空间定位几何原理图
随机点O与节点Pi之间的距离关系可以构建方程组如下:
式(1)经过方程组解算和转换,可以得到一个线性方程组:
由式(2)可知,当Δ3=0时,方程组无解,此时P1、P2、P3、P4在同一平面上;而当Δ3≠0时,方程组有唯一解,此时P1、P2、P3、P4不在同一平面上。
在野外实际布设像控点时,渡槽周边布设的4个角点只要有高差即可满足唯一性要求。
3.2 云匹配法
云匹配法,又称作cloud to cloud,顾名思义,由点云与点云之间进行匹配。可以手动拼接、也可以由软件识别操作,一般建议先手动粗匹配,再由软件实现精确配准。
云匹配法示意见图3,假设以机载Lidar渡槽成果作为固定参照,拖动背包式点云成果,拖动时寻找公共点X,让公共点X重合,分别从X轴、Y轴、Z轴3个方向上参考拖动,直到3个方向上的X点都是重合的。

图3 云匹配法示意图
机载Lidar数据与背包式的数据处在2个不同的空间中(图4和图5),采用云匹配法进行数据融合,红、蓝、绿三轴可以实现整体沿对应轴滑动点云,红、蓝、绿三环可以实现沿对应环旋转点云,最后的结果见图6,灰色的点云为机载Lidar,蓝色的为背包式数据,实现了点云数据2种采集方式的良好融合。

图4 渡槽的2种不同扫描方式汇集的点云成果图

图5 云匹配法拖动过程图

图6 云匹配法匹配结果图
3.3 同一坐标系法(GNSS模式法)
激光雷达作为测物设备,仅能获取被测物的相对于激光雷达的位置,构建一个虚拟的相对空间坐标系,如果机载Lidar与背包式三维激光扫描仪可以感知设备本身在同一坐标系中的绝对位置,那么它们获取的数据也将在同一坐标系中保持一致。GNSS模块便发挥出重要作用,集成了GNSS模块的激光雷达,可以精确定位自身位置,无论机载Lidar还是背包式三维激光扫描仪均可以实现被测目标的精确定位,见图7。
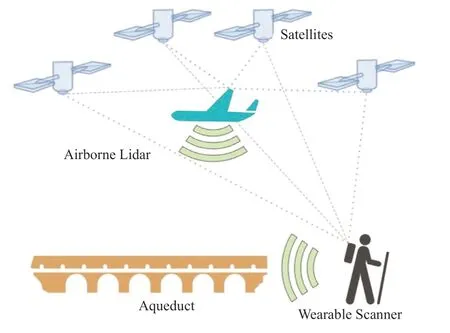
图7 机载Lidar与背包式扫描仪在GNSS模式下作业原理图
4 染色对比分析
综合以上3种融合方式进行简单比对,可以得出表2:
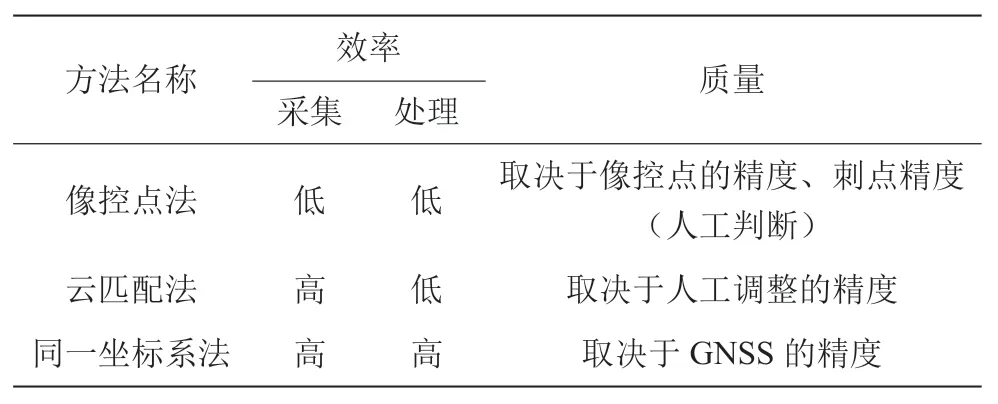
表2 3种融合方法对比表
作业效率方面:鉴于像控点布设工作的时间成本,像控点法在点云数据采集效率不如云匹配法,而在采集效率和处理效率上均不如同一坐标系法,云匹配法虽然采集效率上等同于同一坐标系法,但是因数据处理阶段,手工调整点云配准的用时不确定性又影响了作业效率。
点云质量方面:像控点法与云匹配法较多地依赖于人工后期处理,给点云质量带来较多不确定因素。而同一坐标系法只取决于卫星解算和虚拟基站数据解算的质量。
综上,从采集效率上,可以先排除像控点法;云匹配法的质量与同一坐标系法的质量差异,将通过下面实验比对得出结论。
4.1 云匹配法
首先将同一渡槽的机载Lidar和无GNSS信息的背包式激光数据进行云匹配(见图8),再将两组数据分别赋色(见图9),沿渡槽槽墩顶部垂直渡槽的方向进行剖切,得到槽墩侧面的轮廓点云集,最后抽取相同槽墩相同位置的双色点云,进行偏差比对,计算出该模式下点云融合的中误差。
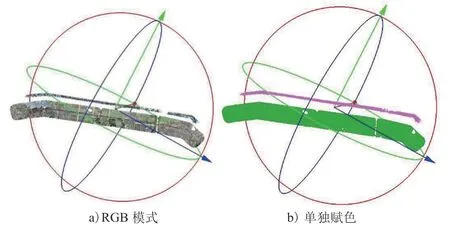
图8 匹配过程中的机载Lidar和背包式激光数据图

图9 匹配后的机载Lidar(绿色)和背包式激光数据图(粉色)
图10中,分别抽取5个渡槽槽墩作为检验目标,以渡槽水流平面作为XY平面,垂直于XY平面为Z轴,沿Z轴俯视渡槽水流面,从1号槽墩到5号槽墩,分别沿Z轴垂直于水流方向切割,获取槽墩轮廓断面(见图11),从轮廓断面中,再抽取任意位置的邻近绿色点与粉色点,计算点位中误差,评估点云融合质量,融合结果见表3。
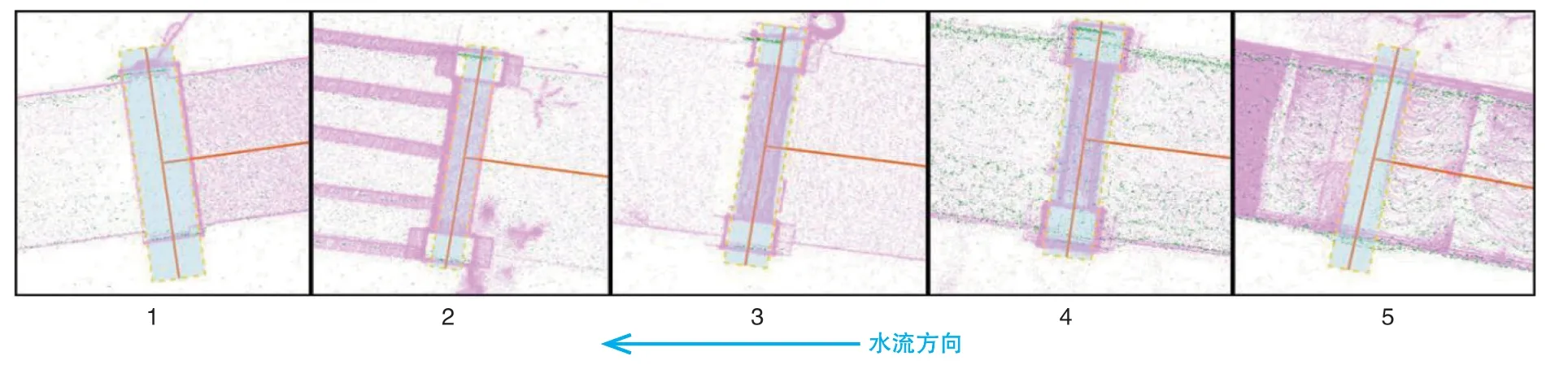
图10 云匹配法中渡槽点云融合数据俯视图
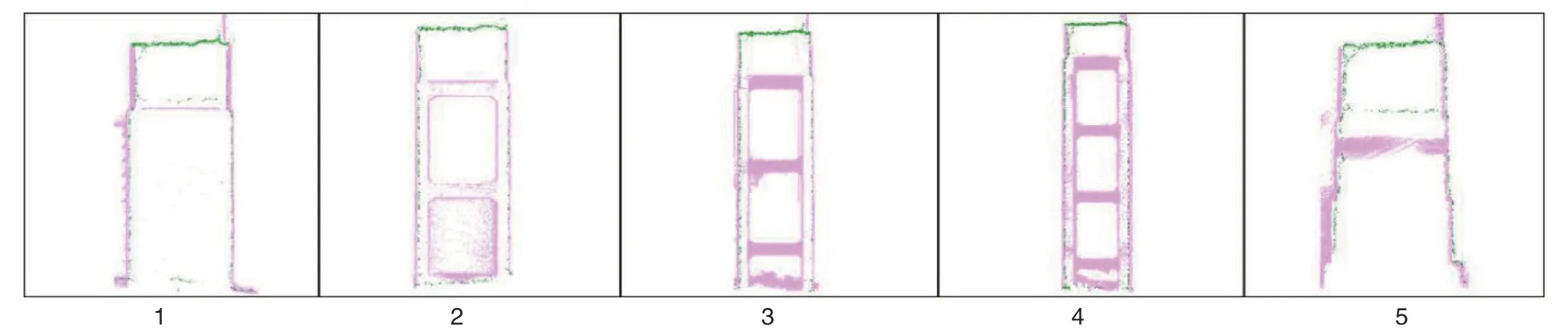
图11 云匹配法中剖切后的槽墩点云轮廓图
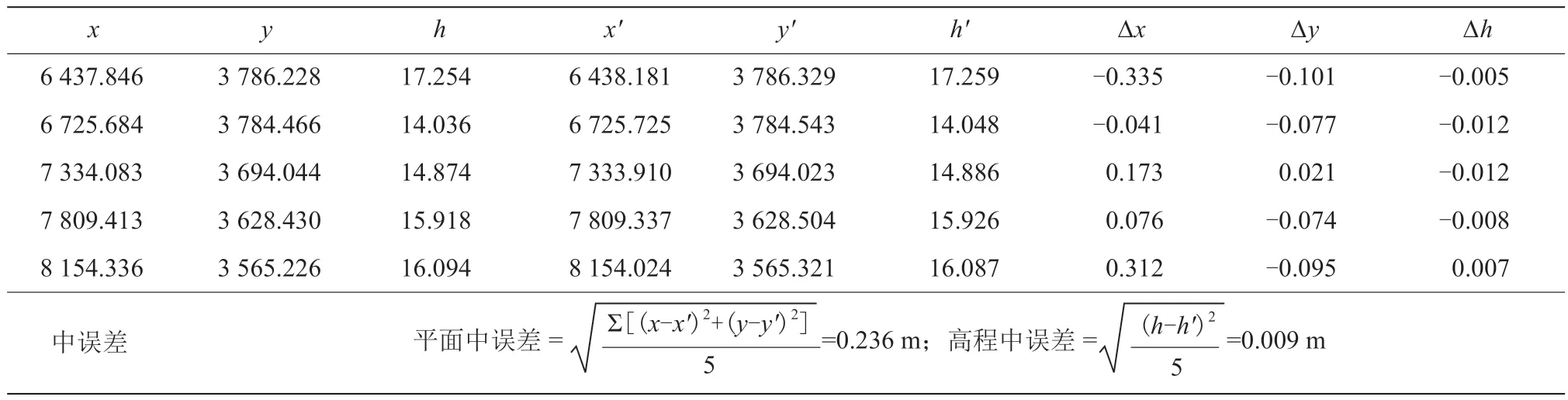
表3 云匹配法中点云融合随机抽样对比表(数据已偏移处理) 单位:m
4.2 同一坐标系法
通过对同一坐标系法下的机载Lidar和背包式激光数据进行染色比较,分析该种模式下的点云质量。先将2组数据置放于同一坐标空间中,然后分别对两组数据进行赋色,图12 a)为点云RGB模式,图12 b)为2组数据单独赋色模式,红色点云为机载Lidar,蓝色点云为背包式数据。
参照云匹配法,自左往右分5个断面抽取比较点,见图13~14,以判断2组数据的偏差情况。
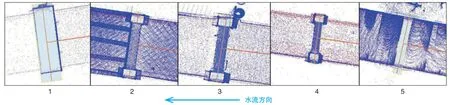
图13 同一坐标系法中渡槽点云融合数据俯视图
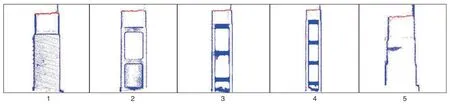
图14 同一坐标系法中剖切后的槽墩点云轮廓图
由表3和表4对比可以发现,同一坐标系法中,点云融合的平面偏差中误差为0.044 m,明显优于云匹配法的0.236 m;高程偏差中误差为0.008 m,略优于云匹配法的0.009 m,因此,同一坐标系法的点云融合精度更高。

表4 同一坐标系法中点云融合随机抽样对比表(数据已偏移处理) 单位:m
5 结 语
本文以渡槽安全评估中的三维激光扫描数据为例,指出其相对于传统方法的突出优势,探讨了机载Lidar与地面激光扫描成果的三种融合方式,并通过染色比对分析云匹配法和同一坐标系法的点云融合精度,证明了同一坐标系法在空地点云融合中的精度优势。在下一阶段研究中,将继续通过项目案例研究渡槽安全检测中机载Lidar扫描的最佳控制高度和背包式三维激光扫描仪的最优控制距离。
猜你喜欢
建材发展导向(2022年24期)2022-12-22 07:45:56
中华建设(2020年5期)2020-07-24 08:55:46
农民文摘(2019年11期)2019-11-15 01:03:48
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
河北水利(2017年6期)2017-09-05 11:04:13
作文周刊·小学一年级版(2016年42期)2017-06-06 22:16:15
中等数学(2017年2期)2017-06-01 12:21:50
童话世界(2017年11期)2017-05-17 05:28:26
