
基于点云技术的景深与层次量化分析方法研究
2023-09-26 08:25张潇涵成玉宁
中国园林 2023年8期
张潇涵 成玉宁
长期以来,景深与层次一直是建成环境景观空间营造所关注的热点话题之一[1]。景深,即景观空间深度,是由人可视范围内景观空间要素与人眼的距离所决定,反映空间要素在纵深方向的分布状态;层次则是由于要素到人眼距离差异、要素间相互遮挡及人视觉感知特性等因素,导致空间在纵深方向形成的多个视觉界面,通常可将空间划分为近景、中景和远景3个层次。传统基于定性描述及低精度的景深与层次分析方法,已难以满足景观视觉感知与偏好等风景园林领域研究及高品质景观空间营造中所面临的量化分析需求。点云作为风景园林领域三维空间信息记录的工具之一,能够辅助多尺度空间精细化展现与研究[2]。运用点云等数字景观技术对景观空间的组构及形态特征进行深入探析,将对辅助建成环境高品质空间营造具有积极作用。由此,本文尝试构建基于点云技术的景深与层次量化分析方法,深描建成环境景深与层次客观特征,并探讨其在多场景运用中的潜力。
1 景深与层次研究现状
1.1 景深与层次相关研究
景深与层次在视觉景观评价、景观感知与偏好、城市开放空间形态分析及植物造景等领域被国内外学者广泛探讨[3-5]。自20世纪80年代以来,景深与层次作为表征景观空间形态复杂度及开敞度的重要因子之一,被运用于城市视觉景观特征与空间结构的研究中[6-7]。同时,其作为城市开放空间形态评价指标之一,相关研究通过照片、图纸及三维模型模拟分析等方法对城市公园、城市森林等研究对象展开量化分析,并将其作为空间质量评价的重要依据[4,8]。艾普顿于1975年在其“瞭望-庇护”理论中对视距与人群景观偏好的关联进行了论述。自此,相关领域学者通过大量照片、问卷等实验方式验证了景深与层次对人群景观偏好影响的客观性[9-10]。眼动追踪技术的运用进一步助力了学者从心理与生理层面对相关机制展开深入探究[11]。
近年来,环境行为与健康领域相关研究表明,景深是影响人运动方式与心理压力缓解的重要因素之一[3]。随着城市开放空间形态与人群健康福祉的关联得以验证,通过精确分析建成环境景深与层次特征,进而辅助提出符合人群偏好、有益人们健康的设计策略,将会对营造出以人为本的高品质城市空间具有重要意义。
1.2 过往研究中景深与层次量化分析方法的局限
在过往景观感知与偏好领域研究中,二维图像作为主要的实验刺激材料,虽能对人视觉感知界面的要素占比与位置形状进行分析,但却无法精确量化空间纵深维度形态特征,导致研究中对景深与层次的评价多以主观判断为主。同时,景深与层次多作为不同空间质量评价体系中的单一因子,被简化为如最大视距和立面层次的面积比值等。然而单一数值难以全面描述空间全要素深度与视觉界面层次特征。
地理信息系统技术的发展使得景深与层次在视觉景观与城市开放空间形态研究领域得以定量化分析。通过视域分析工具可对特定视点可视域范围内的要素分布及层次轮廓线等形态特征加以分析。该方法被广泛应用于城市公园空间形态、城市天际线及城市眺望景观等研究中[4,12-13]。然而,粗颗粒度的空间模型难以精确展现景观环境中如植被等要素,且以二维栅格图像和视域平面图形几何属性为主的分析结果,缺少对人真实视觉界面的模拟,从而导致难以与城市街景照片、VR等影像研究材料相结合,无法满足当下人群感知与偏好等领域的精细化研究需求。
1.3 利用点云进行景深与层次量化分析的优势
点云作为能够精确展现空间信息的数据类型,目前已在三维景观格局分析、城市三维绿量、林业监测、古典园林测绘等领域大量运用[14-17]。将点云模型通过体素法转变为封闭的实体模型虽能够对要素的体积和形态进行分析,但基于体素模型的三维可视分析方法在计算的效率与量化结果的精度方面存在一定局限[18-19]。
随着机器视觉等领域的发展,利用点云模型三维视觉模拟的技术已在无人驾驶等领域有了较为成熟的使用。其不仅能够模拟出环境中任意位置视点全视域范围的视觉界面,还能通过深度图的像素色彩差异表达要素纵深维度的分布特征,即能够将空间形态三维属性在二维视觉界面上呈现,兼具了二维实景图像分析与三维可视域模拟方法的部分优势。Yokoya等学者早期利用激光雷达等多源数据模拟得到的深度图像来计算空间开敞度指标,以作为空间视觉质量评价的标准[20]。但由于其所采用的数字地表模型无法精确展现植被形态,导致模拟结果与真实环境存在一定偏差,且未有对多种空间形态指标分析方法的探讨,难以应用于景观空间的精细化研究中。因此,本文将以点云三维视觉成像技术为基础,探讨从原始空间数据采集、算法模拟、数据分析及结果可视全过程的景深与层次量化分析方法,并通过在实际案例中的运用及与过往方法比对论述该方法的可行性与实操性。
2 基于点云技术的景深与层次量化分析方法构建
2.1 基本技术路线
以点云技术为基础的景深与层次量化分析方法分为3个部分,分别为数据准备与参数设定、算法模拟与结果可视、量化分析与辅助判断(图1)。

图1 基于点云技术的景深与层次量化分析模型
2.2 景深与层次模拟算法
以1.9.1 版本的点云库(Point Cloud Library,PCL)为代码源,构建景深与层次模拟分析算法。研究主要利用PCL中的点云获取、可视化及深度图像生成等功能相关代码,构建包含景观空间点云加载与转换、点云模型显示、点云模型球形投影转换和结果输出等功能的算法程序。
2.3 具体操作
2.3.1 原始空间数据采集与处理
利用无人机倾斜摄影或机载激光雷达扫描的方式能够高效地获取大范围景观空间点云模型。首先,利用无人机航拍与地面人工补拍照片的方式获取完整的场地图像数据。其次,通过Context Capture软件生成场地三维点云模型。最后,利用Trimble Realworks软件将不同要素类型的点云进行分类并区分颜色,为后续要素语义图生成做准备。
2.3.2 景深与层次模拟
景深与层次模拟分为点云数据输入、参数设定和量化结果输出3个部分。由于本文采用单目相机球形投影,因此需要对视点三维坐标、水平视轴方向、水平与竖直方向视角范围、最大视线长度等视觉特征参数进行确定。视觉特征参数需根据人在景观空间中的观景方式而确定,如静观发生在供人驻足停留的地点,人在头不转动的情况下,双眼水平视角最大可达到188°,竖直方向视角可达到120°。动观则为人在行进中对景物的观赏,如在沿道路行走或者慢跑且头的方向保持直视前方时,水平视角为124°[21]。
将处理好后的点云模型与视点等参数载入算法程序中,即可进行球形投影转换得到的深度图像和要素语义图像,以及图像每个像素点对应的深度数值与语义数值(图2)。
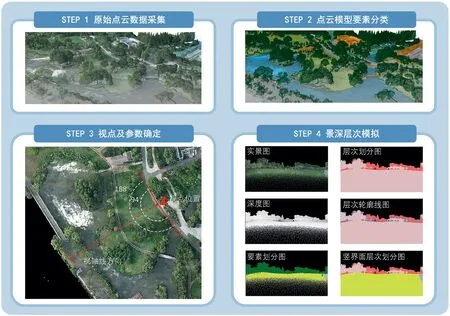
图2 景深与层次模拟具体步骤示意
2.3.3 景深与层次量化分析
1)景深量化分析指标。
景深作为空间要素到人眼距离数值的集合,需对其数值的分布特征进行探讨。本文结合过往相关研究,选取空间最大延伸度、空间整体深度和空间深度差异度3个指标进行量化分析。
(1)空间最大延伸度。
空间最大延伸度指标反映空间在纵深方向的延伸程度,用空间要素深度的最大值来表示,其公式为:
式中,Es为空间最大延伸度;di为深度图像中除天空外部分像素点对应深度数值。
(2)空间整体深度。
空间整体深度指标反映空间的开敞程度,用人视野范围内要素距离人眼的平均距离来表示。对空间中各要素深度值求取平均值即可得到空间整体深度数值,其公式为:
式中,DA为空间整体深度;di为深度图像像素对应深度数值;n为除天空外总像素点数量。
(3)空间深度差异度。
空间深度差异度指标用来描述空间视觉界面纵深方向的变化(凹凸)程度。当视觉界面纵深方向凹凸变化显著时,空间深度值差异较大,界面的丰富度较高。本文采用要素深度值的方差作为反映该特征的指标,其公式为:
式中,DD为空间深度差异度;di为深度图像各像素点对应深度值;n为除天空外总像素点数量。
2)层次量化分析指标。
根据人在外部空间中对不同距离要素形态感知的差异,并结合过往相关研究成果,本文以距离人眼小于25m、25~100m、大于100m的景观要素形成的空间界面作为近景、中景和远景[22]。根据深度图像中各像素点的深度值进行层次划分,在此基础上将景观空间层次的特征用层次度(近、中、远景面积占比)、层次轮廓起伏度和层次渗透率3个指标来描述。
(1)层次度。
层次度指标为近、中、远层次面积占人总视野面积的比值,用来反映视野中不同距离范围内的要素形成界面层次数量,以及不同层次比例的均衡程度。分别计算各层次面积占总视野成像面积百分比数值。本文延续过往学者对于层次度指标的表达形式,即用三者占比的比例形式,其公式为:
式中,LD为层次度;S1为近景层次面积;S2为中景层次面积;S3为远景层次面积;SW为全视野范围成像面积。
(2)层次轮廓起伏度。
层次轮廓起伏度是描述空间各层次轮廓线起伏程度的指标。过往学者对于轮廓线起伏程度采用天际线相邻拐点之间的高度差值或轮廓线分形维数为起伏度数值[14]。本文采用将3个层次的轮廓线长度与视野成像总宽度的比值之和作为层次轮廓起伏度,其公式为:
式中,FL为层次轮廓起伏度;L1、L2和L3分别为近、中、远层次轮廓线长度;LW为视野成像画面总长度。
(3)层次渗透率。
层次渗透率反映了空间竖向界面的渗透程度。在近、中、远景划分的基础上,去除底界面部分,即得到竖界面的近景、中景及远景层次。将竖界面3个层次面积与总竖向界面可视面积的比值分别乘以系数1、2/3和1/3,数值相加即得到了空间渗透率,其公式为:
式中,PS为空间渗透率;Sa、Sb、Sc分别为竖界面近景、中景和远景层次面积。
3 景深与层次量化分析方法的实践应用
3.1 案例选取
考虑到研究对象的普及性和空间形态的丰富性,本文选取南京市情侣园和河西生态公园作为研究对象,从单一视点与动态多视点2个层面展现该方法的具体运用。2个研究对象皆为面积在20~30hm2的城市综合性公园,受公众认可度较高,且内部包含滨水、广场、草地与林地等不同类型的空间。
3.2 方法运用
3.2.1 点云模型采集与处理
为避免天气等外界因素对数据精度产生影响,选择在夏季晴朗少云且风速小于2m/s的天气下利用无人机对研究场地进行倾斜摄影,人工在地面补充拍摄林冠覆盖密集区域照片,进而在软件中生成三维点云模型,并按要素类型进行分类。
3.2.2 单一视点景深与层次模拟分析
为验证该方法是否能对特定视点景深与层次进行分析,满足以单一视点照片为材料的研究需求,随机挑选情侣园中一处视点作为研究样本进行实景拍照。首先,根据相机镜头参数与拍摄操作,设置水平视角、垂直视角、视轴方向与视点高度参数。其次,通过三维视觉模拟即可得到与照片视野范围一致的深度图、要素语义图,以及各像素点对应数值。最后,利用公式计算得到该视点景深与层次各指标的结果(图3)。

图3 单一视点实景照片及景深与层次模拟结果
从分析结果看,该方法能够有效弥补二维图像缺少空间纵深方向信息的缺陷,且通过图像结合多个指标数值的方式能更加全面直观地描述其景深与层次的特征。
通过实地调研,选取2个公园中20处供人驻足观景的节点,涉及广场、路口、建筑与构筑物等重要景观节点和视线通廊,进一步验证该方法的普适性(图4)。从分析结果来看,多指标的数值能够直观地展现不同视点所在空间形态的差异。例如,视点2和视点6皆为滨水空间,视点2对应河道纵深方向的视廊,视点6所在位置为开敞近圆形水面,四周被高大乔木围合。因此,视点2在空间整体深度和空间深度差异度方面显著较高,且具有更大的层次渗透率。同时,笔者初步发现,空间深度差异度的数值大小与空间整体深度、远景层次面积占比及层次渗透率几个指标间存在一定关联。后续研究可考虑增大样本数量,验证各指标的有效性并优化完善指标体系。
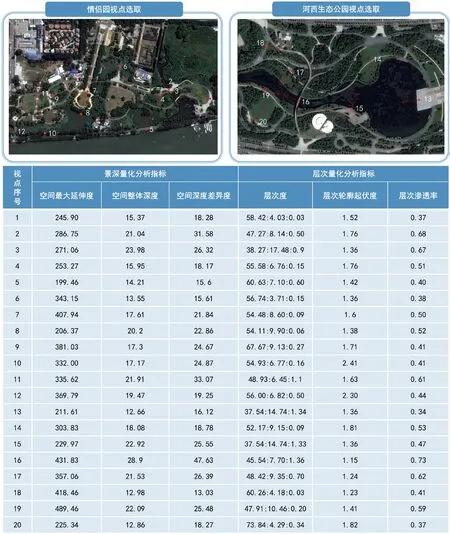
图4 单一视点景深与层次量化结果
3.2.3 多视点路径空间景深与层次模拟分析
选取情侣园南部片区2条路径作为研究样本,以探究本文所提方法是否能够应用于较大尺度的景观空间多视点分析。以人行走15s的长度为间隔,沿道路中心线等距连续设置21个视点进行模拟(图5)。通过折线图直观地展现2条路径景深与层次各指标数值总体分布、变化幅度与频率及重要拐点,以辅助设计师客观认知路径空间景深与层次的动态变化特征,进而结合设计需求,找到空间提升的潜力位置,提出道路沿线要素配置与空间形态优化策略(图6)。
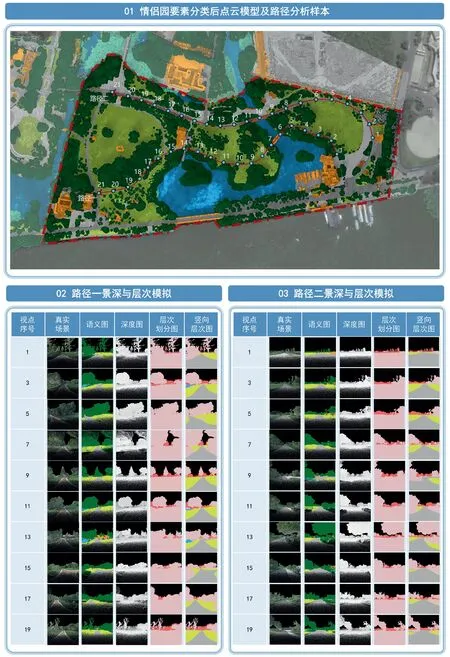
图5 多视点路径样本景深与层次模拟结果
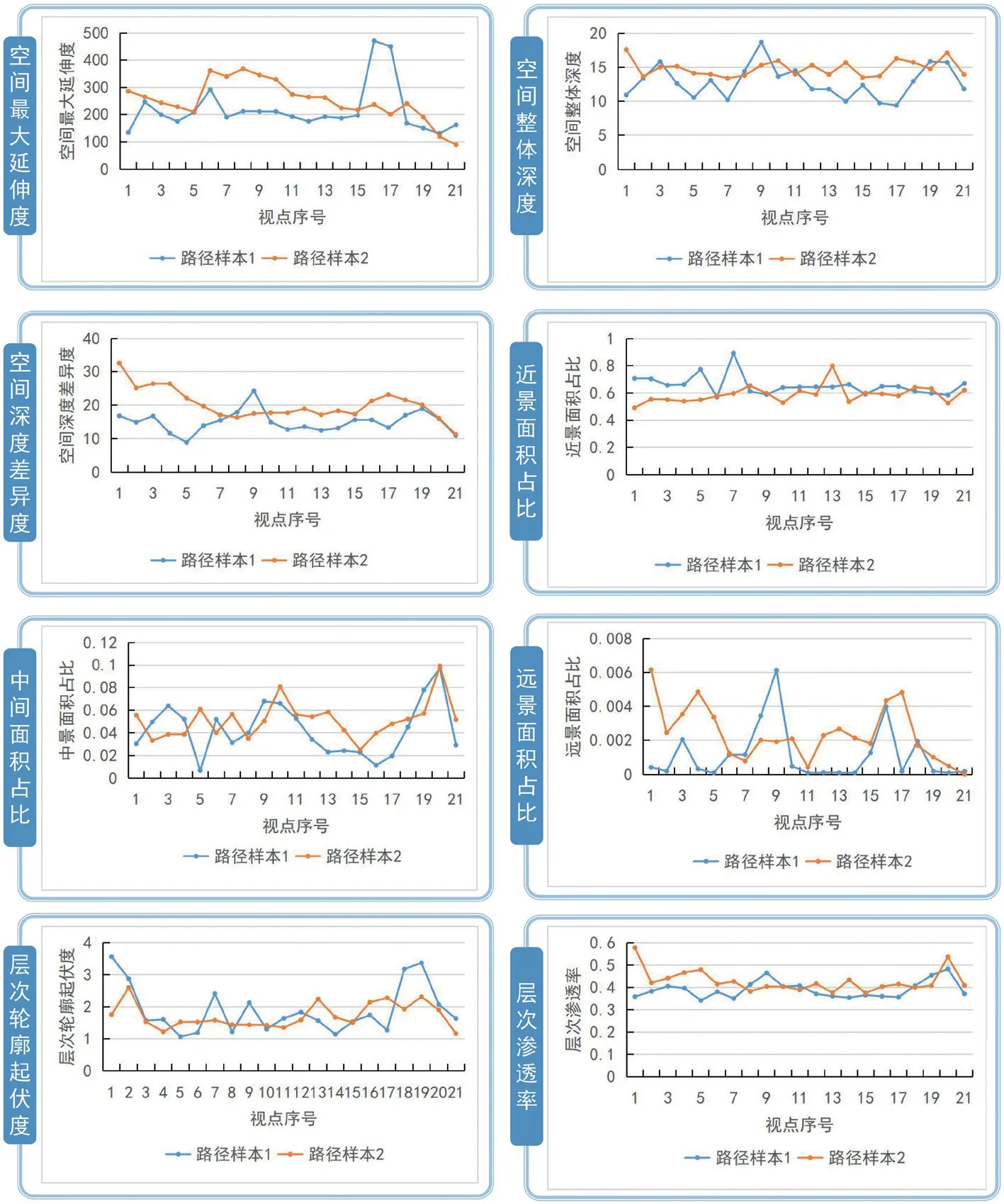
图6 路径样本景深与层次量化分析结果
首先,对路径样本景深变化特征进行分析。路径1空间最大延伸度数值变化总体平稳,而路径2在视点5处数值陡增后随着人的前进呈现出下降趋势。可以考虑将路径1中部两侧植被局部打开形成视窗,增加空间最大延伸度的变化;路径2可改变后半段现状两侧由平均分布的行道树所形成的单调界面。
其次,对样本空间层次变化特征进行分析。路径1层次轮廓起伏度以及渗透率的变化呈现出近似的周期性,一定程度表明了路径1在层次的变化上存在重复性;路径2层次轮廓起伏度与渗透度指标数值变化幅度与频率较低,以及层次轮廓起伏平均值较低。因此,在实际的改造中,可考虑在路径1中部通过移除部分近景植被来增加空间渗透率,提升中景占比以丰富层次轮廓线形态;增加路径2两侧林缘线的曲折度,局部增加近景占比,营造出多层次的植被界面。
最后,对景深与层次多量化指标数值拐点进行判断。路径1在视点6、7、9、16、17、19、20处多个指标出现了峰值,视点9的空间最大延伸度、空间深度差异度、远景层次占比及渗透率指标都为全路径最大,表明该处空间具有较好的视线延伸感、渗透性及层次的丰富度。路径2则难以找到具有代表性的空间特征点,可考虑依托现状广场、桥梁及建筑打造空间形态丰富的节点。
由此可见,该方法将多视点景深与层次的动态变化特征转译为数值与可视化图表,以此为依据,设计师可以直观认知人在路径空间行进中对于景深与层次的实际感受,从而更加准确高效地做出判断与设计。
3.3 与传统计算方法比对
为总结出基于点云技术的景深与层次量化分析方法的优势,选取情侣园中的一处测试点,分别利用本文提出的方法同传统景深与层次分析方法加以比对分析(图7)。
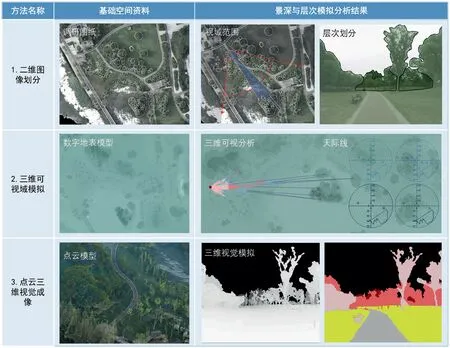
图7 景深与层次量化方法比对
1)传统景深与层次分析方法。
(1)二维图像分析。
依据画面中要素的相对位置及透视原理对拍摄的照片进行手动划分层次,描绘层次轮廓线。绘制平面图纸,并在其上画出视点对应可视范围,作为空间层次分析的依据。
(2)三维模型可视域模拟。
将数字地表模型导入ArcGIS软件,利用3Danalysis工具集中的可见性工具对选定视点进行三维可视模拟,进而对可视域栅格、视线长度及天际线轮廓进行分析。
2)分析方式对比。
(1)分析的效率。
利用本文的方法,在获取点云模型后,对单一视点的模拟可快速完成。三维模型可视域模拟方法对不同指标的计算需要多次操作,耗时较长且需要对多种格式的结果进行处理。人工二维图像分析需要较长时间的平面基础图纸准备过程,且对不同的视点进行分析时需重复实地摄影与调研工作。
(2)数据的精度与结果可读性。
二维图像分析方法的可视范围及空间层次依靠人工绘制,无法避免主观判断带来的误差;分析的结果可读性较强,但仅能够对空间最大深度及天际线曲折度等少量指标进行分析。三维可视域模拟分析方法中植被等要素空间信息被简化为栅格像素属性值,导致在层次轮廓线等视觉界面指标的分析结果与实际产生较大误差,且最终结果难以直接与空间实景照片要素对应。
3)适用的场景。
通过对3种方法优劣势的分析,进一步总结出其所适用的场景。二维图像分析由于其便捷性与直观性,适用于对结果精度要求不高的空间分析,如在方案初步设计中。三维可视域模拟依托于地理空间系统平台,拥有完善的分析方法和操作流程,适用于较大尺度的城市空间形态研究。本文所提方法由于在分析效率、数据精度及结果可读性等方面的优势,且能同时满足视觉界面二维与三维特征的分析,在建成环境景观空间形态精细化研究、景观空间感知与偏好等领域展现出优势。
3.4 应用于多种研究对象的潜力
选取4类尺度差异较大的景观空间作为案例,以探讨该方法在不同类型景观空间中运用的潜力和差异(图8)。
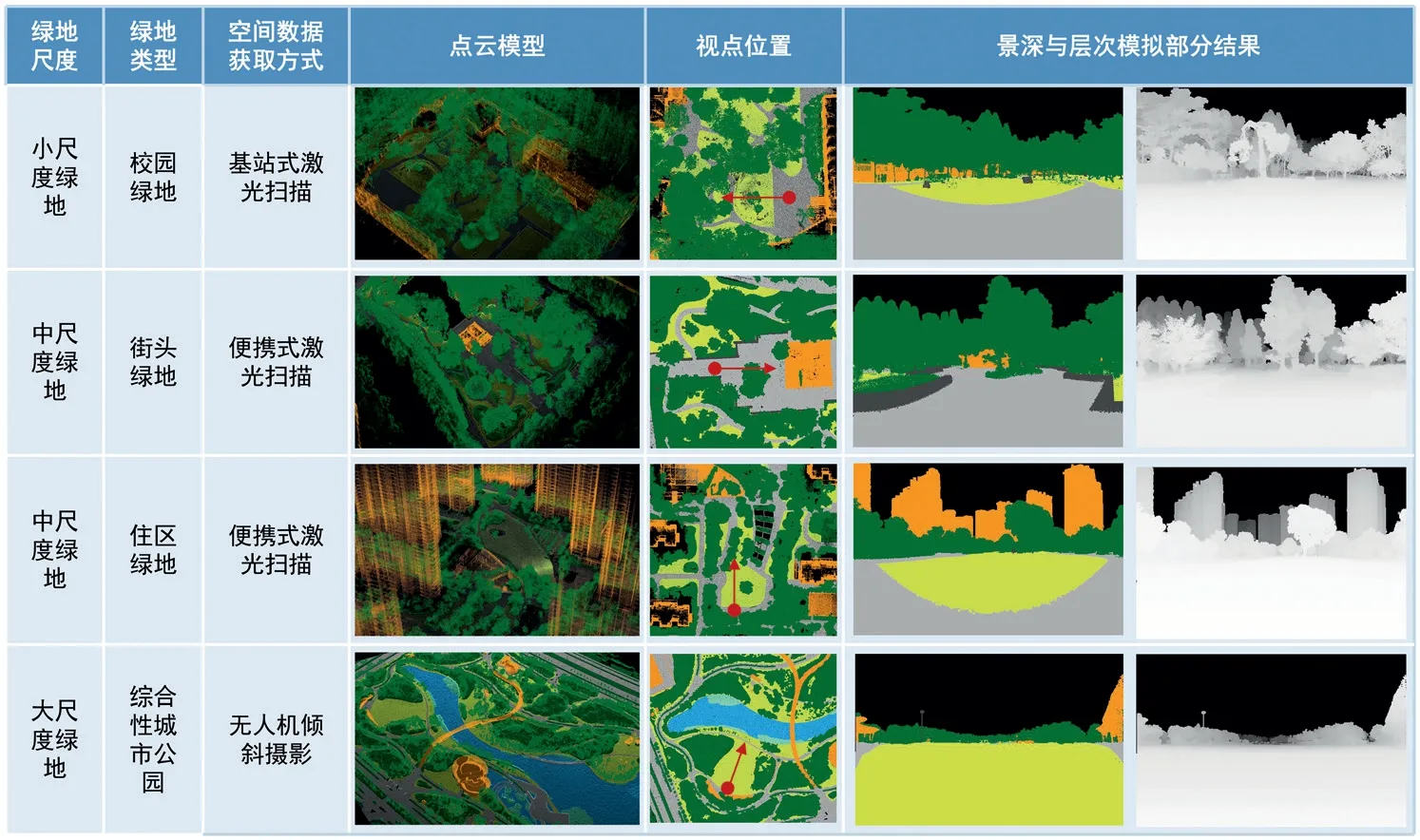
图8 不同类型研究对象应用过程比对
1)空间数据采集方式。对于城市小微绿地而言,可选用地面基站式激光扫描仪采集精细的林下空间及树冠形态数据。中观尺度的街头绿地与住区绿地面积较大,使用便携式激光扫描仪能够高效获取精度较高的点云数据。而对于大尺度的城市综合性公园,可利用无人机倾斜摄影或机载雷达扫描快速采集数据,但数据的精度相对较低。
2)点云模型范围大小。三维视觉模拟结果的准确性取决于点云模型是否涵盖视点在真实环境中的所有可视要素。城市中小尺度景观空间外围的乔木、高楼及山体皆可成为影响其内部空间景深与层次的重要因素。因此,在实际应用过程中,需先实地调研以判断周边关键要素,进而通过无人机补充采集或人工建模的方式补全点云模型,以确保最终模拟结果的精确性。
3)具体模拟参数设定。研究对象的尺度及要素分布的不同使得空间深度值分布区间差异较大,前文以25和100m为界划分近、中、远层次,但该划分依据难以适用于小微尺度景观空间的研究中。在实际模拟参数设定时,需根据对象的实际情况调整参数,如对于小尺度景观空间可以采用将视觉焦点要素作为中景进行层次划分。
笔者在对多类型对象的实验中发现,利用该方法得到结果的稳定性与以下因素相关。一是点云模型的密度。密度的降低虽能带来计算机运行效率的提升,但当密度过低时,会导致模拟视线穿过点间空隙,使得要素成像存在像素点缺失现象。二是视点的位置。由于三维视觉模拟方法遵循透视法则,当视点与周围的要素距离过近时,模拟视线会从近处要素点云模型的缝隙中穿过,导致空间深度计算出现误差。三是模拟视线的数量。其与输出二维图像精度大小直接相关,当其数值设置过大时,会导致运算的速度降低。
4 讨论与展望
4.1 价值与不足
本文首创性地将点云三维视觉模拟等技术在景深与层次分析中进行应用,全流程数字化及以点云模型作为单一数据类型使得该分析方法更为客观与便捷,在量化分析的效率、数据的精度及可读性等方面较传统方法具有较大提升。
但不可否认,基于点云的景深与层次量化方法存在以下局限性。首先是在点云模型的处理方面,由于目前自动分割算法对于景观空间要素的精确划分还难以实现,因此在前期数字模型的处理阶段仍需要人工的介入。其次,该方法还未与现有学科领域常用的软件相结合,且操作过程中涉及算法编程与多平台的转换。同时,本文虽枚举了6个在过往研究中已采用过的指标进行量化计算,以期展现方法对于景深与层次特征描述的全面性和便捷性,但指标仍存在进一步优化的可能。未来仍需进一步探讨如何将该方法与其他景观空间形态评价方法相结合,以更加全面地认知景观空间形态特征,进而提出精准优化策略。
4.2 未来发展与运用前景
该方法在使用的便捷性与算法的全面性方面仍存在优化提升的空间。如可将算法改编为Grasshopper插件,以Rhino软件作为点云模型编辑与展示平台,在实现分析与方案设计一体化操作的同时,使其具备与参数化、智能化设计方法相结合的潜力。增加距离衰减系数等设定对天气、光线等影响因素的模拟。由于景观空间具有历时性特征,可在不同季节采集点云数据,并与单木分割、骨架提取等技术结合,模拟分析不同季节的景深与层次。
从运用前景来看,未来该方法可以运用于人群感知偏好、视觉景观评价、环境行为与心理健康等领域的研究中。如将该方法与实景照片、眼动仪、皮电仪、VR等技术相结合,以精确探讨真实环境或虚拟方案景深与层次对人群偏好的关联或心理压力缓解作用等。与之对应,可将相关领域的研究成果作为依据,用该方法进行方案评判,更好地促进循证设计的实现。将其与绿视率、空间界面色彩、要素类型及空间尺度等多个量化评价方法结合,通过实时、直观、全面地展现景观空间形态分析结果,辅助景观方案的设计、评价与优化。
注:文中图片均由作者拍摄或绘制。
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22
当代水产(2020年4期)2020-06-16
现代园艺(2017年22期)2018-01-19
河北书画研究(2017年1期)2017-08-22
山东青年(2016年2期)2016-02-28
河南电力(2016年5期)2016-02-06
新闻前哨(2015年2期)2015-03-11
中国水利(2015年5期)2015-02-28
数码摄影(2009年8期)2009-10-14
中国校外教育(上旬)(2009年6期)2009-08-04
