
基于冠层信息的马铃薯喷雾机喷杆高度控制系统研究
2023-09-23 03:47王相友曲军哲许英超李学强肖正伟王琳琳
农业机械学报 2023年9期
王相友 曲军哲 许英超 李学强 肖正伟 王琳琳
(1.山东理工大学农业工程与食品科学学院,淄博 255091; 2.山东省马铃薯生产装备智能化工程技术研究中心,德州 253600;3.山东思代尔农业装备有限公司,德州 253600)
0 引言
马铃薯是继水稻、小麦、玉米之后的世界第四大粮食作物,随着马铃薯种植面积的不断增加,马铃薯田间病虫草害的防治成为提高马铃薯产量的关键环节[1-4]。目前,国内大田种植的马铃薯通过宽幅喷杆式喷雾机进行植保作业,现有的马铃薯喷雾机具有幅宽大、施药量大等特点,其作业幅宽普遍大于12 m,甚至可达42 m[5-8]。在田间作业时,为保证喷雾效果,喷雾机喷杆与马铃薯植株冠层需要始终保持最佳施药距离[9-11],但因植株长势不均匀以及地势不平,喷雾机车身受外部激励就会引起喷杆喷药高度的变化,导致药液喷洒不均匀,造成多喷或漏喷等问题[12-13],严重时喷杆末端还会触碰地面或作物冠层,造成喷杆或植被损坏[14-16]。因此,实现喷杆高度的自动调节,实时检测喷雾机喷杆相对作物冠层姿态是十分必要的。
近年来国内外研究人员基于喷雾机田间作业时喷杆的运动状态,并利用传感器检测技术设计喷杆高度自动控制系统的研究报道较多[17-22]。但实践证明在针对喷杆高度控制的研究中,仅仅考虑喷杆的运动状态而忽略对喷施作物冠层信息的研究,会导致喷雾机作业时喷杆相对冠层高度控制不准确,难以达到精准施药的最终目的。目前针对作物冠层高度信息的研究较少,主要集中在采用超声波传感器来探测喷杆相对作物冠层高度,有研究表明超声波传感器可以检测作物冠层的轮廓、高度和体积[23],但其易受外界环境干扰,对于冠层高度不均匀的作物检测精度较差,尤其是在马铃薯从现蕾到初花期这个最佳喷药时间段,此时段马铃薯植株枝叶错综复杂,超声波传感器并不能够准确地获取喷杆相对区域作物冠层顶部距离,从而会引起喷杆误调节。近年来,激光雷达探测技术逐渐应用在农业作物冠层信息的检测中[24],通过数学方法处理激光雷达高密度点云数据可以获取植株冠层高度信息,与超声波传感器测量法相比,该技术具有测量精度高、扫描范围大、速度快等优点。
为此,本文设计一套基于激光雷达冠层信息测量的马铃薯喷雾机喷杆高度控制系统,通过激光雷达探测技术并融合姿态传感器、位移传感器实现喷雾机喷杆相对作物冠层的距离检测与高度精确控制,并通过试验验证田间作业时喷杆高度控制系统的准确性和稳定性。
1 系统结构与工作原理
1.1 整体结构
喷杆高度控制系统基于山东思代尔农业装备有限公司生产的3WP-1500型马铃薯喷雾机进行设计,整体结构主要由喷杆、机架、减震机构、喷杆液压控制系统、激光雷达探测装置等组成,如图1所示。喷雾机喷杆幅宽24 m,整体喷杆左右结构对称(图1已省略左侧喷杆),共分为9段,平衡架及右侧各段喷杆长度分别为2、3、3.2、2.8、2 m。

图1 喷雾机喷杆机构结构简图
整体喷杆铰接在机架上,通过喷杆升降调节油缸可以使整体喷杆在300~1 200 mm的离地高度范围进行作业。喷杆左右两侧大臂铰接在平衡架两侧,通过倾角调节油缸使喷杆相对平衡架进行转动,从而调节左右两侧喷杆的作业高度。同时,3个激光雷达探测装置分别水平安装在左侧、右侧四臂与左侧、右侧三臂铰接点70 cm处以及平衡架中段,分别测量喷杆两端及喷杆整体相对冠层高度。激光雷达探测装置主要由二维激光雷达、姿态传感器和步进电机等组成,如图2所示,整个探测装置通过“U”型螺栓固定在喷杆方管上,激光雷达与姿态传感器平行安装并垂直于地面,激光雷达扫描平面距激光雷达探测装置与喷杆方管接触面垂直距离80 mm。激光雷达用于扫描马铃薯作物冠层;姿态传感器用于获取三轴角度,y轴数据表现为喷杆水平倾斜角度,x轴数据表现为激光雷达扫描平面与地面的夹角;步进电机用于修正激光雷达初始位姿,作业前调整激光雷达扫描平面垂直于地面。

图2 探测装置示意图
1.2 控制系统组成及工作原理
喷杆高度控制系统主要分为数据采集与处理模块和喷杆控制模块,硬件系统结构如图3所示,选用ARK-2230型微型计算机为中央处理器,西门子PLC S7-200 smart为输出控制。微型计算机通过串口接收传感器及激光雷达数据,通过以太网接口连接PLC交换数据。液压阀组选用电磁比例换向阀,改变油路方向,实现油缸伸缩。速度传感器选用BHM12-C10NA型霍尔传感器,安装在喷雾机拖拉机轮轴处,获取整机行驶速度[25]。ES02型拉绳式位移传感器检测油缸伸缩长度。

图3 硬件系统结构框图
喷杆高度控制系统调节原理如图4所示。喷雾机田间作业时,激光雷达实时扫描马铃薯冠层,通过串口通信将激光雷达扫描的冠层点云数据传输到计算机,通过滤波算法、高度信息解算方法实时获取喷杆相对马铃薯作物冠层顶部距离,当检测到喷杆下待喷施区域马铃薯植株长势发生变化或喷雾机受到外部激励,喷杆喷药高度发生变化时,计算机向PLC发出比例换向阀控制指令,驱动喷杆升降调节油缸或倾角调节油缸调节喷杆高度,直至喷杆调整至最佳喷药高度时停止调节。
2 基于LiDAR的喷杆相对马铃薯冠层高度控制系统设计
喷杆高度控制系统的目的是为了喷雾机在田间作业时,喷杆始终与作物冠层保持在一个最佳喷雾距离范围之内。马铃薯生长期内需多次进行喷药作业,且大田种植的马铃薯存在区域内作物长势不均以及种植区域地势起伏的情景,为了提高喷雾效率,合理利用药液,需要对喷杆相对作物冠层高度实时进行精确控制。本文选用二维激光雷达检测马铃薯冠层,根据田间马铃薯种植模式分割地块单元,通过激光雷达点云数据处理方法获取精确的喷杆相对区域作物冠层高度信息,实现喷杆高度实时控制。
2.1 冠层单元分割
根据单垄单行种植模式的马铃薯植株冠层分布特点,以实现喷杆相对冠层高度信息精确检测为目标设计冠层分割模型。所选二维激光雷达以线扫描方式进行测距,原理如图5所示。激光雷达数据坐标系以扫描中心为坐标原点,垂直地面方向为Y轴,水平方向为X轴,激光雷达扫描平面垂直于地面,激光雷达发射出激光到目标冠层被反射到激光雷达内部单光子接收单元,形成一个测距点k,一个扫描周期内所有测距点的集合为一帧冠层点云数据,喷杆与冠层测距点的垂直高度为
Hki=ρicosαi(i=1,2,…,j)
(1)
式中Hki——喷杆与植株冠层测距点的垂直高度,mm
ρi——测距点到激光雷达扫描中心的距离,mm
αi——测距激光与雷达0°测距激光的夹角,(°)
j——单帧数据中测距点的个数
在实际测量中,仅扫描单垄作物冠层难以准确表现喷施区块的整体冠层高度,而扫描过多垄数冠层数据会降低激光雷达的扫描精度,并且存在数据量过大、冠层点云数据不连续等问题。为了提高获取高度信息的效率和精度,本试验采用激光雷达单次扫描至少3垄马铃薯植株冠层的方法,如图6所示(L为马铃薯种植垄距,m;u为激光雷达相邻两次扫描水平间隔距离,m;F1,F2,…,Fn为高度信息序列;W1,W2,…为高度判断单元),喷雾机匀速行驶时将单次扫描1帧包含3垄马铃薯作物冠层顶部的高密度点云数据定义为1条高度信息序列F,将沿从第一条高度信息序列起始的1个株距长度l内所包含的若干高度信息序列定义为一个高度解算单元W,由此沿喷雾机行驶方向将激光雷达所需扫描区域内田间作业地块分割为若干个高度解算单元。
喷杆相对喷施单元内冠层顶部垂直距离H的一般计算方法为
(2)
其中
(3)
式中n——单位单元内高度信息序列个数
Favei——喷杆相对冠层顶部的垂直距离,m
f——激光雷达扫描频率,Hz
v——喷雾机行驶速度,m/s
[·]——取整运算函数
2.2 传感器选型与参数设定
根据需求,本文选用镭神智能M10P型二维激光雷达,该传感器扫描角度为360°,角度分辨率为0.22°,测点速率为20 000点/s,扫描频率为12 Hz,量程10 m,工作电压3.3~15 V,标准串口输出数据;维特智能JY901S型姿态传感器,输出数据为三轴角度,角度范围为:X轴和Z轴±180°、Y轴±90°,角度精度为:X轴和Y轴0.2°、Z轴1°,工作电压为3.3~5 V,标准串口通信方式;ES02型拉绳式位移传感器,量程2 000 mm,分辨率0.25 mm,拉线速度最大2 m/s,RS485通信方式。
为了激光雷达扫描时能够至少获取3垄马铃薯植株冠层顶部点云数据且不造成数据冗余,在单垄单行种植模式马铃薯种植垄距0.8 m,株距0.5~0.7 m,最佳喷雾距离取0.5 m,喷杆升降离地高度0.3~1.2 m等参数指导下,激光雷达扫描宽度应大于1.6 m且小于2.4 m,因此将激光雷达数据输出角度范围设为140°,并对获取的数据进行过滤,如图7a所示,冠层点云数据坐标系XOY以激光雷达扫描中心为原点,垂直地面方向为Y轴,水平方向为X轴,激光雷达输出角度为[70°,290°]。在实际测量中,对喷雾机单边喷杆高度调节时,单侧喷杆相对铰接点旋转,安装在喷杆两端的激光雷达扫描范围随之旋转,为了保证激光雷达扫描数据的计算精度,使用姿态传感器获取的水平方向角度数据实时修正激光雷达输出数据范围。如图7b所示,A、B为该时刻角度修正后数据帧输出角度左右边界,在某一时刻,姿态传感器检测到喷杆水平角度倾斜θ,使用角度θ修正激光雷达数据输出范围,该时刻二维激光雷达数据帧的输出角度范围为[70°-θ,290°-θ],其中θ∈[-15°,15°]。
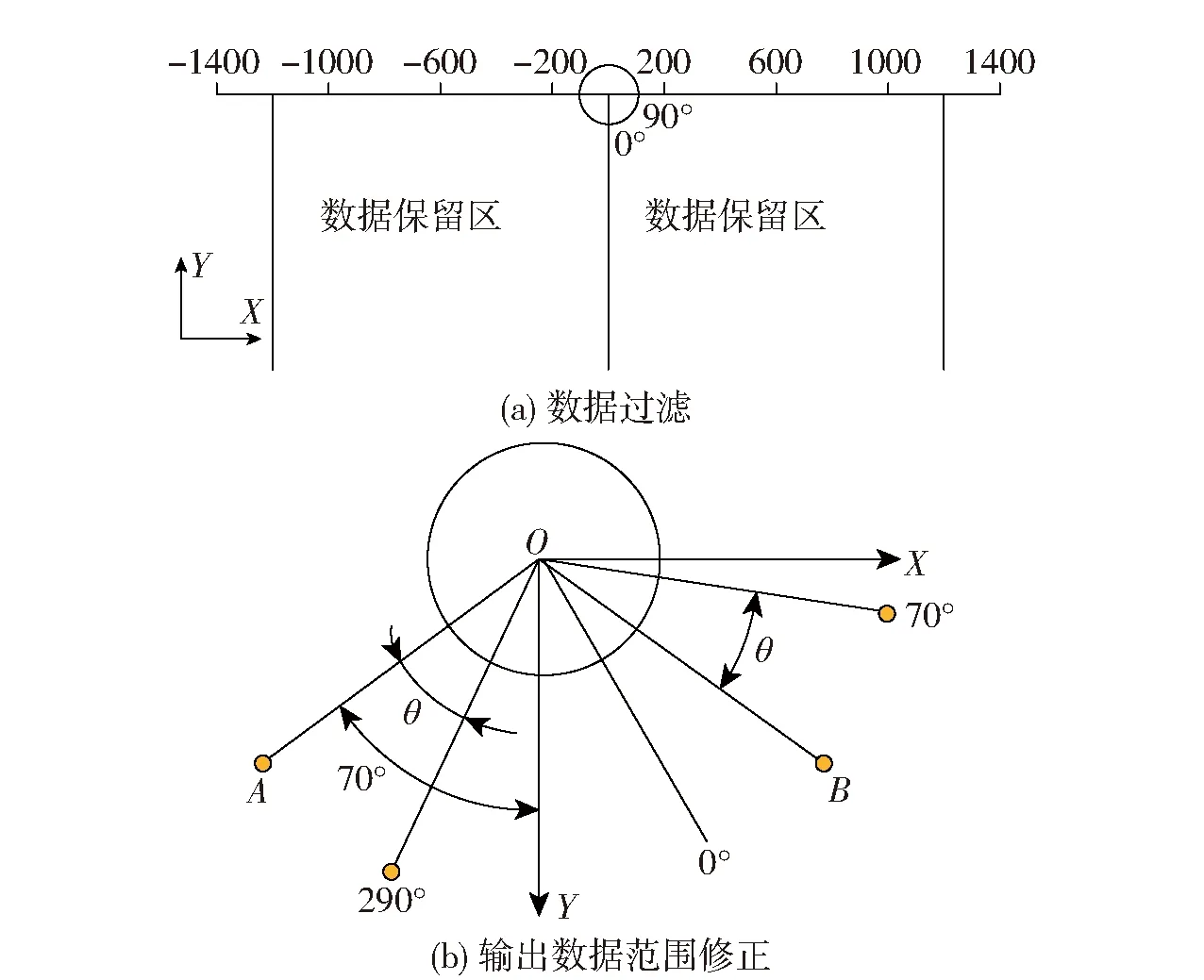
图7 激光雷达数据过滤及角度修正
2.3 喷杆相对冠层高度数据处理方法
本文通过对目标作物冠层单元分割,采用二维激光雷达扫描植株冠层,并对多帧冠层点云数据应用算法处理,最终获取喷杆实时相对作物冠层顶部距离。数据处理流程主要包括点云数据滤波、多帧数据融合、MLS曲线拟合和加权平均垂直高度。
2.3.1数据预处理
田间作业时,喷雾机作业环境复杂,尘土飞扬、雾滴飘移等情景会对激光雷达测距激光造成干扰,产生数据噪声,以及测距激光束穿过冠层枝叶会产生离群干扰点,为了保证获取高度信息的准确性,故需对冠层点云原始数据滤波处理,同时为了滤波时不破坏原始点云数据,选用非线性滤波器——中值滤波对原始点云数据进行滤波处理,设滤波滑动窗口为 7,任一高度判断单元中任一条高度信息序列F=(k1,k2,…,kn),滤波后的高度信息序列F′为
F′=(K1,K2,…,Ki,…,Kn) (n∈Z)
(4)
其中
Ki=Med(ki-7,ki-6,…,ki,…,ki+7)
(i∈[1,n])
(5)
式中Med(ki-7,ki-6,…,ki,…,ki+7)为该数据序列的中值化处理。综上,将一个单元内的n条高度信息序列叠加并滤波处理(此处n=3),如图8为中值滤波前后数据对比,可以看出经中值滤波后消除了大部分噪点且冠层点云数据更加平滑。
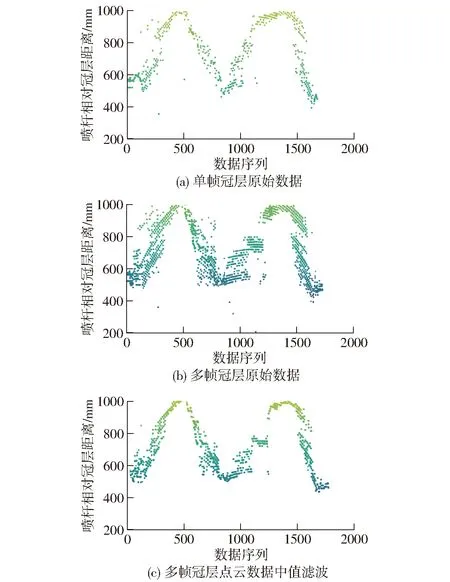
图8 冠层点云数据中值滤波结果
2.3.2基于MLS的喷杆相对冠层距离信息获取算法
多株马铃薯冠层点云能够直观地表现出植株的冠层顶部轮廓,通过拟合滤波后的冠层点云数据可以较准确地获取喷杆相对冠层顶部的垂直距离。本文采用移动最小二乘法(Moving least squares,MLS)对一维点云数据进行曲线高精度拟合,通过最小化加权误差平方和、快速划分冠层顶端所在区域、加权平均各区域极值点,实现喷杆相对冠层垂直高度信息解算。
移动最小二乘法是处理大量离散数据拟合曲线的理想算法,与传统最小二乘法相比,此方法引入了紧支撑的概念,MLS将每个冠层数据点周围的邻域视为一个支撑域,并使用该区域内的数据点进行拟合,通过引入一个权函数,可以对不同距离的数据点赋予不同的权重,从而避免全局最小二乘法可能出现过度拟合问题。MLS将拟合子域的局部拟合函数f(x)表示为基函数向量p(x)和系数向量a(x)组合的形式,即
(6)
式中m——基函数的项数
对于一维的冠层点云数据曲线拟合,选取不同的基函数和权函数对拟合曲线有不同的效果,为了提高对大量离散冠层点云数据的拟合速率和精度,取基函数p(x)=(1,x),权函数为三次样条函数,系数a(x)通过局部近似函数在数据点x邻域内各点误差的加权最小平方和J来确定,有
(7)
令Y=(y1,y2,…,yn)T,式(7)对a(x)求偏导可得


A(X)a(x)-B(X)Y=0
(8)
得
a(x)=A-1(x)B(x)Y
(9)
式中n1——点x邻域内的数据点个数
yi——x等于xi处的节点值
w(x-xi)——数据点xi处的权函数,在数据点xi的邻域内大于零,邻域外则为零
本文取三次样条权函数为
(10)
其中
s=|x-xi|/r
式中s——相对距离
r——支撑域半径,mm
综上,取支撑域半径r=30 mm,通过MLS算法对一个单元内的冠层高度信息序列滤波后进行曲线拟合,图9为两例多帧点云数据曲线拟合结果。

图9 冠层点云数据拟合曲线
由图9可知,激光雷达扫描获取到的马铃薯植株冠层点云数据整体呈“弧形”,且每个单元内各垄冠层点云数据顶部密度较大,经MLS算法拟合后,程序通过将点云数据横坐标代入拟合函数获取对应点纵坐标并绘出拟合曲线,曲线所包含的冠层顶部区域会存在极小值点,图10为两例冠层数据拟合曲线极值点分布情况,程序根据数学极小值判定条件:拟合函数在极小区间内(本文区间长度取20),存在自变量取值x的某点,且存在比其大与比其小的自变量,这些自变量所对应的函数值y均大于x对应的函数值,判断该点为极小值点,由此得出的这些极小值点则表现为喷杆相对冠层顶部垂直距离点。由于受田间植株枝叶复杂等情况的影响,所获取的点云数据拟合出的曲线在冠层顶部区域往往存在不少于1个极小值点的情况,如图10b所示,针对这种情况在解算高度时,根据植株冠层点云数据的分布特点以及数据帧输出角度范围,程序按照雷达数据过滤及中值滤波后,点云数据横坐标最大值与最小值之差的总区间长度将拟合曲线从左至右横向分割为1∶2∶1的3个解算区域,加权平均3个区域中极小值点中的最小值,最终得到喷杆相对单元内冠层实际垂直距离H为
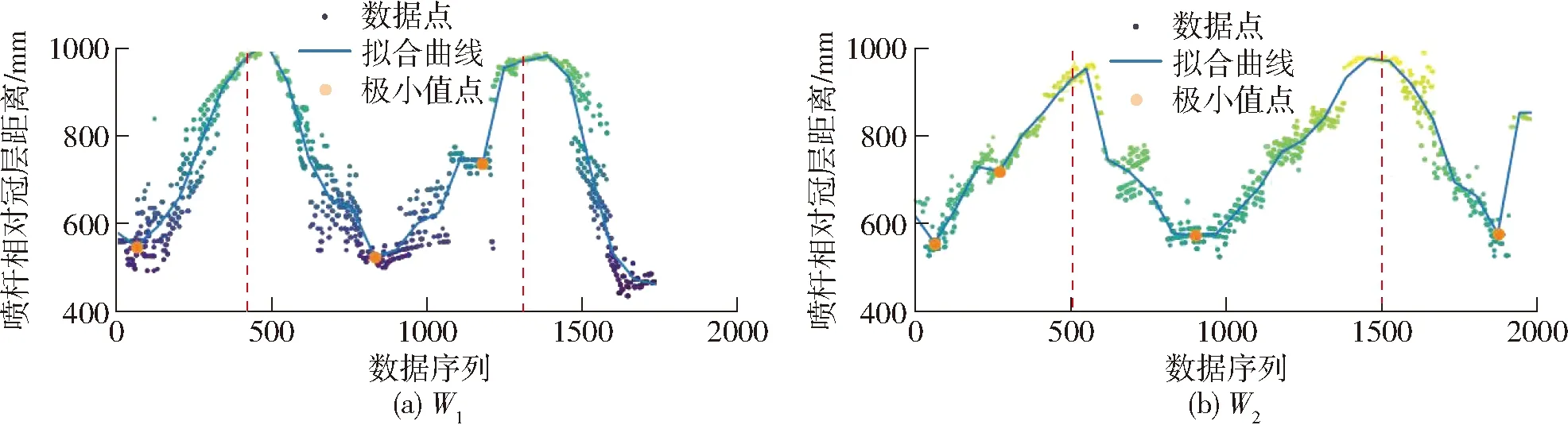
图10 冠层拟合曲线极值分布情况与区域分割
(11)
式中Favemin1、Favemin2、Favemin3——各区域极值点最小值,mm
w1——权重系数,取0.3
w2——权重系数,取0.4
2.4 喷杆高度控制策略
为了喷杆两端高度调节时能够快速到达目标高度,根据液压油缸活塞杆伸缩长度、喷杆水平方向变化角度和喷杆调节高度之间的数学关系优化控制策略。右侧喷杆相对运动示意图如图11所示,a、b分别为油缸与平衡架和喷杆方管的铰接点,c为喷杆与平衡架的铰接点,d为喷杆末端高度对应点。喷杆末端高度调节时,液压缸伸缩带动喷杆绕着铰接点c转动,推导出液压缸长度变化与喷杆末端高度变化的关系为
lm=l1+Δl=
(12)
式中l1——喷杆水平位置液压缸长度,mm
lm——高度调节后液压缸长度,mm
Δl——液压缸长度变化量,mm
lac——喷杆方管ac的长度,mm
lcb——喷杆方管cb的长度,mm
Δh——喷杆垂直高度的调节量,mm
l2——喷杆铰接点到末端的长度,mm
液压油缸的行程短,通过位移传感器检测油缸伸缩长度,在控制程序发出喷杆升降控制命令后,更加快速调节喷杆到达目标高度附近。根据式(12)将喷杆高度的调节转换为液压油缸伸缩位移的调节,并设定液压缸长度调节阈值δ2以及喷杆高度调节阈值δ1,当Δh≤δ1或|lm-l1|≤δ2时完成高度调节。采用双阈值的策略可以使程序能够较为快速接收到喷杆高度调节到位的反馈信号,在一定程度上避免因喷杆反复调节导致喷杆振荡的问题,提高系统运行稳定性,从而提高喷杆高度调节的响应速度以及调节精度。
喷杆调节时,整体喷杆分为中段喷杆与两侧喷杆,为了喷杆高度调节时能够协调中段喷杆与喷杆两端的调节动作,避免超调,在喷杆控制策略中根据具体调节量设定高度调节动作,假设当前激光雷达装置检测到中段喷杆及两侧喷杆相对冠层高度分别为H1、H2、H3,预设喷药高度为Ht,则控制系统将驱动喷杆整体液压调节油缸升降中段喷杆高度H1-Ht,并分别驱动两侧喷杆液压油缸升降喷杆末端高度H2+|H1-Ht|-Ht、H2+|H1-Ht|-Ht,仅当喷杆相对冠层实时高度与预设喷药高度之差小于或等于任一调节阈值后停止调节。
2.5 软件设计
喷杆高度控制软件系统分为数据采集处理模块与喷杆控制模块。数据采集处理模块基于Python语言开发,运行平台为ARK-2230型微型计算机,并基于Python-pyqt5设计数据可视化界面实时监测喷雾机作业参数。喷杆控制模块基于西门子PLC S7-200 smart开发,控制喷杆升降。两模块之间通过以太网S7协议连接通信。喷杆高度控制主程序如图12所示。

图12 主程序流程图
系统启动后先进行初始化。通过显示屏输入预喷药高度和调节阈值δ1、δ2,并启动激光雷达探测装置实时检测喷杆相对冠层高度,当检测到喷杆高度需要调节时,根据喷杆控制策略分别驱动两侧以及中段喷杆液压油缸进行升降调节,当高度偏差小于任一调节阈值时停止调节,当高度偏差大于高度调节阈值时继续进行升降调节,直至喷杆相对冠层高度调节到位。
3 试验
为了测试高度控制系统的准确性和稳定性,分别进行了高度检测精度试验和喷杆高度调节试验。试验时均开启喷雾系统,以水代替药液。试验情景如图13所示。

图13 试验机具与场景
3.1 试验材料与方法
喷杆高度控制系统基于3WP-1500型背负式马铃薯喷杆式喷雾机进行测试,其他试验测量工具有:水平仪(辅助矫正姿态传感器初始读数)、卷尺等。于2022年7—8月在河北省张家口市某马铃薯种植基地试验田进行试验,采集对象为“希森6号”马铃薯。试验田内地况平坦,马铃薯植株长势较为均匀,田内马铃薯采用单垄单行种植模式,垄距L为0.8 m,株距l为0.25 m,株高D为0.5~0.7 m。根据GB/T 24677.2—2009《喷杆式喷雾机 试验方法》和GB/T 24680—2009《农用喷雾机 喷杆稳定性 试验方法》分别进行了高度检测精度试验和喷杆高度调节性能验证试验。
3.2 高度检测精度试验
高度检测精度试验如图14所示,选取试验田内一块5 m×24 m平坦的马铃薯田间地块,按照0.25 m的株距长度将该试验地段从1到20逐段编号。试验前喷雾机整体喷杆初始对地垂直距离设置为1 m,试验时喷雾机以速度2 km/h驶过马铃薯田间地块,期间仅开启激光雷达探测装置,喷杆高度无调节。数据采集程序按照作业距离每0.25 m记录1份激光雷达所扫描地块作物冠层信息样本,共获取冠层点云数据样本20份,对应地段编号1~20。
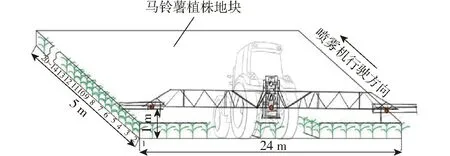
图14 高度精度检测试验
为了能够方便计算出激光雷达动态测量时的高度检测误差,试验时将获取植株冠层的高度代替喷杆相对冠层高度,按照地段编号顺序手工测量并根据式(11)的权重系数计算该地段植株冠层高度信息,对照样本数据共20份。
表1为喷雾机左侧喷杆所经过田间地块内冠层高度的系统测量值与人工测量值对比,可以看出通过激光雷达系统测量冠层高度的结果和人工测量结果的最小相对误差为0.14%,最大相对误差为7.16%,平均相对误差为3.95%,由此可见基于激光雷达动态测量高度的准确性良好。

表1 马铃薯植株冠层高度系统测量值与人工测量值对比
3.3 喷杆高度调节试验
喷杆高度调节试验如图15所示,选取试验田内一块10 m×24 m地势平坦且植株长势均匀的马铃薯田间地段,将整体喷杆初始相对冠层高度调节为0.5 m,预设调节喷杆相对冠层高度为0.7 m,液压缸调节阈值δ2分别设为3.5、2.5、1.5 mm,喷杆高度调节阈值δ1分别设为7、5、3 cm,试验时喷雾机以3.6 km/h的速度驶过10 m×24 m的马铃薯田间地块,连续记录多次喷雾机从初始点A行驶到点B处的喷杆对作物冠层高度的实际测量值,并分析在不同调节阈值δ1、δ2组合下喷杆高度控制系统的调节性能。
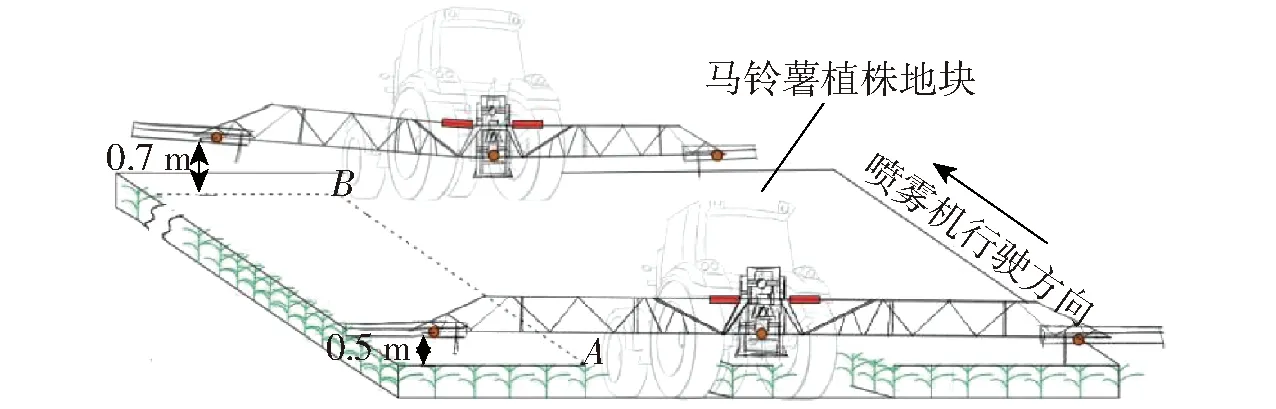
图15 喷杆高度调节试验示意图
在不同调节阈值组合下启动喷杆控制系统,得到预设高度与实际测量高度数据。喷杆高度调节试验数据折线图如图16所示,在开启高度控制系统后,设置不同的调节阈值,喷雾机左侧喷杆相对冠层高度从初始500 mm均能调节到700 mm附近,喷杆高度调节误差随着调节阈值增大而增大,但是当高度调节阈值为3 cm时,因喷杆过长,调节阈值过于灵敏,液压油缸出现反复调节现象,喷杆末端会产生小幅振荡,导致高度调节精度较差且系统运行不稳定;当高度调节阈值为7 cm时,喷杆控制系统运行较为稳定,未出现反复调节现象,但调节误差较大;当高度调节阈值为5 cm时,高度调节误差较小,且系统运行平稳。

图16 不同调节阈值组合下喷杆调节试验结果
表2为高度试验数据分析结果,可得当高度调节阈值为3 cm,液压油缸调节阈值为1.5 mm时,喷杆控制系统调节性能最差,标准偏差为53.62 mm,平均相对误差为8.31%;当高度调节阈值为5 cm,液压油缸调节阈值为2.5 mm时,系统调节性能表现最好,标准偏差为21.81 mm,平均相对误差为3.08%,系统运行平稳,满足喷雾机大田作业时喷杆相对冠层高度自动调节需求。

表2 高度调节试验分析结果
4 结论
(1)设计了基于激光雷达的马铃薯喷雾机喷杆高度控制系统。该系统采用二维激光雷达并融合姿态传感器对马铃薯冠层进行扫描,并根据田间植株冠层分布特点,基于中值滤波方法、MLS曲线拟合算法实现了喷杆相对冠层的垂直距离信息的实时解算。并设计了双阈值高度调节的控制策略,实现了喷杆相对冠层高度的自动控制,满足田间作物仿形喷雾的需求。
(2)高度检测精度试验表明,通过激光雷达探测装置动态扫描马铃薯植株冠层,并基于MLS算法进行高度信息解算,最终获取的冠层高度最小相对误差为0.14%,最大相对误差为7.16%,平均相对误差为3.95%,说明激光雷达检测喷杆相对冠层距离的方案可行,并且检测精度良好。
(3)喷杆高度调节试验表明,在开启喷杆高度控制系统后设置高度调节阈值为5 cm,液压缸调节阈值为2.5 mm时,喷杆能够较为准确地调节到预设喷药高度,高度调节标准偏差为21.81 mm,平均相对误差为3.08%,且系统运行稳定。
猜你喜欢
农业开发与装备(2022年7期)2023-01-05
农业装备与车辆工程(2022年5期)2022-10-31
中国农机化学报(2022年8期)2022-08-12
中国农业信息(2022年1期)2022-05-25
农业机械学报(2022年2期)2022-03-14
农业机械学报(2021年11期)2021-12-07
大气科学(2021年1期)2021-04-16
中小企业管理与科技(2019年3期)2019-03-07
农机使用与维修(2018年3期)2018-03-23
农业知识(2018年45期)2018-01-17
