煤矿综采工作面自动化智能化开采技术研究
2023-09-20 01:20陈俊国
西部探矿工程 2023年8期
陈俊国
(山西潞安集团司马煤业有限公司,山西长治046000)
我国的煤炭资源十分丰富,国内对煤炭的利用也较为多样,在日常生活中,我们使用煤炭来进行发电仍占据着国家能源结构的主要部分,并且在未来相当一段时间内仍需要大量利用煤炭资源来构建我国的能源构成。随着各种矿井开采的进行,许多煤矿表层较易开采的部位已经开采完毕,正逐渐往更下层煤矿进行作业,但由于下层地质结构中环境恶劣,经常会出现高温、高压等情况,一旦开采出现问题,会导致矿山灾害的产生,严重影响煤矿的开采效率,甚至危害人民安全,为了煤矿开采的安全生产,许多问题亟待解决,针对于此,本文开展研究了煤矿开采的智能化技术,以推动井下自动化智能化的发展。
1 自动化智能化开采研究现状
相对比于国外,国内的煤矿开采自动化、智能化发展较晚,但在吸取国外优秀技术的基础上,我国的相关技术发展迅速,大量科研人员通过不懈努力研制了一批拥有自主产权的开采设备,为煤矿的安全生产做出了重大贡献。通过查询文献得知,我国于2007 年首次制造出能取代外国进口的液压支架的电液控制系统;榆家梁矿在2008 年通过实际测试,达到了液压支架随采煤机移动的自动化移动等目标,冀中能源峰峰集团于2009 年通过和浙江大学合作,在下属多个矿井实现了薄煤层综采面工作的采煤机的数字化,无需工作人员下井操作,就能实现对薄煤层的工作面进行开采,并能实时监测采煤机位置及状态,大大提升了开采的安全性;2013年,“863计划”开展了“煤炭自动化智能化掘进”等专项,为重点发展智能开采核心技术及设备奠定基础;充矿集团于2016 年采用惯性导航系统与技术成功解决了工作面找直的自动化问题,发展了工作面的装备控制等技术;我国又于2017 年立项了国家重点项目——“煤矿自动化智能化开采安全技术与装备”,重点攻关矿井下煤层界面的识别技术、自动化开采核心技术及装置、综采面自动化巡检机器、综采面智能超前支护装置及各种自动化辅助装备及平台等。随着技术的不断发展,截至目前,我国在煤矿自动化智能化的过程中取得了较为丰富的成果,如液压支架电液控制系统、矿井下设备可视化远程控制和采煤机记忆切割等,但我们仍需要对我国的自动化开采技术及设备相对于国外的技术仍具有相当的距离有一个清醒的认识,相信随着我国的不断发展,技术上完成超越已经不需要很长的时间[1]。
2 综采工作面自动化智能化开采的关键技术
图1为综采工作面开采系统主干模型,控制中心是矿井的关键,主要利用控制中心对其他各个系统发出命令,控制其他系统完成指令,实现开采的自动化和智能化。下文就开采中使用到的工作面取直、煤层界面识别、支架自动跟机、记忆切割4项核心技术进行简要介绍。
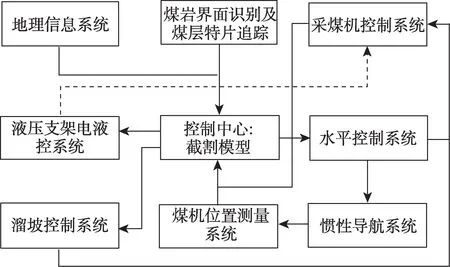
图1 综采工作面开采系统主干模型
2.1 工作面自动取直技术
在综采面向前挖掘的过程中,综采面应该形成一个较好的直线,这样刮板输送机与液压支架之间的受力才能维持在较好的水平。实现这一目标需要对采煤机、液压支架进行精准有效的控制,实时获取采煤机的工作状态及位置参数,可视化分析,控制完成其自动的导航,采用截割模型中的截割数据发送给液压支架控制系统指令。这其中的技术难点是如何实时实现对采煤机的位置检测,通过实践尝试,国内外研究者发现惯性导航技术可以针对此问题进行解决,是实现位置检测的重要技术。
惯性导航技术本身就拥有诸多优点,比起其他技术来说,位置检测的精度较高,但由于长时间会累积误差,采煤机的导航不能长时间自动化,因此需要一定的技术来对累计误差进行修复,利用闭合路径算法可以有效解决这个问题,实现采煤机的自动导航。
天地科技公司把引入的LASC 系统和公司专有技术相结合,实现了工作面自动取直的功能,在一年多的煤矿实际测试中,成功验证了此方案的可行性。此方案利用LASC中惯性导航技术完成采煤机位置检测,实时可视化采煤机工作情况及路线,相互参考竖直向的投影与滚筒高度参数,实现截割工作面的水平,最终液压支架控制系统接收到一系列指令后合理调控刮板输送机,完成找直功能[2]。
2.2 煤岩界面识别技术
煤层界面的识别是自动化开采的核心,通过此技术可以有效勘测出煤矿情况,根据需要对采煤机滚筒进行控制,从而使得煤矿的开采率上升,含矸率下降,也能有效防止截割其他硬质杂质而产生机器损坏。
现如今,煤层识别的技术有很多种,其中图像识别技术及红外探测技术相对来说使用更多。
在综采面截割时,采煤机的截齿由于经常碰撞从而会发生截齿温度上升红外辐射变化的情况,红外探测技术就是针对于此利用红外热像仪对辐射变化进行监控来有效完成对煤层界面的识别。虽然有诸多学者对此技术进行研究,但由于传感器本身所具有的一系列问题,如传感器精度不够,易截割到硬质物体,使得在实际使用只能利用在特定场景下。
图像识别技术其基本原理是采用超清摄像机来实现对煤层图像的捕获,从而实现对图像分析识别的功能。但在实际情况下,由于煤矿井下环境较为复杂,粉尘较多,图像在收集中会受到一系列的影响,所以获取的煤岩图像质量相对较差,在后续的处理中较为困难。
现如今,煤层识别技术没有一种能完全适合所有的矿井,在实际应用中,只能根据实际条件来选择煤层的识别技术,又或者选用多种技术来对图像进行交叉识别,改善技术的缺陷,以解决环境影响的问题。
2.3 液压支架跟机自动化技术
为了实现开采的自动化,工作面向前推进时开采要求具有一定的连续性,此时液压支架跟机自动化必不可少。采煤机在综采面完成一段的作业后,液压支架会根据综采面顶板压力、倾角、位置等参数,以采煤机为参考,利用电液控制将液压支架、刮板输送机等设备及时推送到下一个工作位置,达到自动支护的功能。
当前主流的煤矿综合开采作业面形成了“三机一泵”的自动化生产系统,该系统以自动化跟架技术为主。具体的工作过程为:采煤机上安装的红外线发生装置发送信号,液压支架上面安装有红外线接收装置,可以接收采煤机发送的信号,从而确定两个设备之间的具体空间位置,然后驱动装置代送液压支架等一系列装置跟随采煤机运动,保障了设备之间的连贯性。
但是就目前的状况而言,想要将该技术投入到实际的采煤作业中还有一些问题需要解决,首先是液压支架自动化跟机技术的运行需要编写的程序来控制,程序只能针对一般的工作状况,无法根据实际的作业情况及时做出有效的调整方案,这就导致需要问题机器不能够独立自主的完成,必须安排操作工人时刻关注着机器的运作。此外,采煤设备如采煤机、皮带输送机和液压支架之间没有相关联的控制程序,它们之间就像一个个的孤岛,因此它们之间配合作业效率低下,易发生干涉等故障[3]。
2.4 采煤机记忆切割技术
在很长一段时间内采煤机并没有智能化识别控制模块,只是通过各种物理手段人工控制采煤机开采哪一块,哪一块已经开采完成等作业,工人的判断在这里起着绝对的主导位置。随着技术的发展,采煤机开始接入自动化技术,开始和微控制器相结合,可以实现采煤机工作路线的记录、存储、识别等,采煤机可以自主记忆开采过哪一块的煤层,按照既定的程序判断下一步该开采哪里。这样不仅使得采煤机的作业效率大大提高,减少了空铲的次数,而且解放了工人,工人不需要一直盯着开采作业面,只有当这一块整体开采完毕,工人可以控制采煤机进给。
但是实际的井下作业,工作环境复杂多变,采煤机系统的记忆切割路线会受到极大的干扰,特别是面对容易出现坍缩的开采环境,在采煤机切割完一步之后,实际的工作区域周边的煤炭快速挑中了这一块开挖的空隙。这就导致在记忆系统中本该已经开挖过的区域,实际上早已充满物料,采煤机按照既定的指令工作就会判断失误,导致采煤机与煤炭硬性挤压,严重的可能损坏采煤机,影响作业效率。
综合来看,采煤机记忆切割技术只能适应于地质条件较好,采煤机开挖后,开挖区域周围的地质较稳定,不会大规模地坍缩到已经开挖的区域。但是未来的发展趋势必定是向着智能化、自动化的方向,因此考虑机器学习技术,采煤机一方面存储记忆自己的行动路线,另一方面还能够具体的判断实际的即将作业区域的情况,判断前往作业区域的路径上的状况(有无遮挡等),达到智能化作业的目的[4]。
3 综采工作面自动化智能化开采存在的问题与应对措施
3.1 自动化智能化开采的制约因素
现今,国内自动化、智能化开采还存在着不少的限制,具体来讲尤其以下几个方面:
(1)自动化智能化开采技术不够成熟。尤其是液压支架自动化跟机技术还不够成熟,采煤机记忆切割技术还不够智能,无法自主判断外界环境的变化。
(2)装备的稳定性、可靠性研究需要加强。煤炭开采往往位于几百米深的地下,设备的更换尤为不方便,因此设备的稳定性、可靠性就显得尤为重要。与国外先进的设备供应商相比,国内同类装备在材料、工艺以及智能化水平上还存在较大的差距,设备故障率远远高于国外产品。
(3)急需专业的人才队伍。煤矿开采环境的复杂和艰辛,就使得煤矿工人的工作条件艰苦、环境恶劣、工作待遇差,从而导致了新一代年轻人很少从事这一行业,使得后继无力。而先进装备的使用,新奇想法的产生又往往需要新鲜血液的注入,所以人才缺口日益明显。
3.2 自动化智能化问题应对措施
(1)转变自动化智能化技术发展思想。当前视觉识别技术应用到复杂的煤矿开采作业面上还有很长一段路要走,而根据采煤机的记忆切割技术作业又显得十分呆板,不能对环境的变化做出及时的应对调整,咱们不妨转变思路,将地质探测技术加以完善。如果能够将采煤机即将作业的区域的地质信息全面的采集,将采煤机的作业数据与地质信息放在计算机中进行模拟,合理规划采煤机的作业路线,只要作业环境的变化可以预测,就能够使得采煤机提前做出反应,从而实现精准的作业。初始透明工作面模型如图2所示。
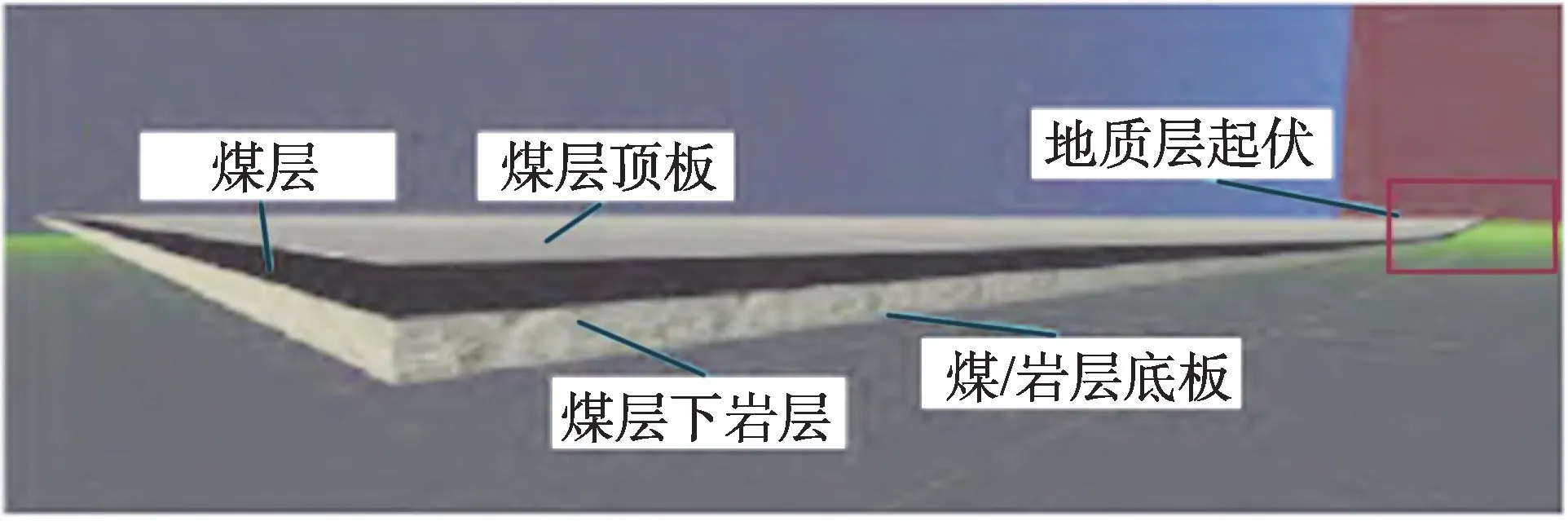
图2 初始透明工作面模型
(2)加大对智能装备的研究投入,进行核心技术的公关,政策大力扶持基础研究,鼓励校企合作,打通技术成果的转化壁垒,增强不同学科之间的沟通交流,设立交叉学科相关的专业,培养技术人员。
(3)加大人才的招聘力度,扩大人才队伍。想要突破就必须要摆脱之前的固有思维,加大人才的培养,重(视人才,不仅要给与更高的福利待遇,而且在工作中尊重技术人员,加快传统煤矿向自动化智能化方向的进步。
4 综采工作面自动化智能化开采技术发展展望
(1)基于5G技术的自动化智能化控制。由于井下的环境更为复杂,遮挡多,障碍物厚,以及矿藏对磁场的影响,使得井下的信号传输备受制约,一大批技术都不能正常使用,必须针对井下的环境,提出更实用的通信方案。随着5G技术的运用,5G设备的成本也在逐渐降低,该技术可以实现数据的高速传输,相关的设备供应商也已经开始布局5G智能煤矿,极大地解决了井下数据传输的难题。
(2)复杂环境下的智能决策技术。由于前两次工业革命的缺席,第三次工业革命勉强跟着发达国家进行,尤其是第三次工业革命计算机的出现把人类带入到数据时代,我国在技术水平方面一直在快速追赶发达国家,但差距还是需要引起重视,未来必将是智能化设备的时代。煤矿开采设备必将得到极大地发展,这就需要开采设备能够自主识别、自行决策,这需要设备的自主学习。采煤机通过自主学习,能够应对各种复杂的作业环境,通过智能决策模型,实现人机交互,完成实际生产作业。
(3)未来的自动化智能化开采设备将实现设备的全面自动化,配合作业工人偶尔的调控,能够轻松地应对复杂多变的作业环境,完成作业任务。随着矿物资源开采环境的日益严峻,未来恶劣的工作环境将使得工人进入作业区域成为一种奢望,设备要足够的智能化才能够完成自检、作业、维护、故障处理等一系列操作,从而使得设备可以完全摆脱人工长期稳定运转[5]。
5 结论
(1)本文主要考虑的对象是煤矿开采作业设备,分析了目前煤矿智能化开采作业中所面临的四个关键技术,包括作业面自动取直技术、液压支架自动化跟架技术、采煤机记忆切割技术和煤层界面识别技术,重点分析了它们的作业原理和所面临的问题。
(2)综合考虑了当前的自动化智能化设备所面临的困境,从技术层面、工艺装备和人才培养这三个角度分析了智能化设备破局的关键,有一定的参考价值。
猜你喜欢
防爆电机(2022年1期)2022-02-16
重型机械(2020年2期)2020-07-24
石油化工建设(2018年2期)2018-07-11
凿岩机械气动工具(2016年2期)2016-11-11
山西煤炭(2015年4期)2015-12-20
采矿与岩层控制工程学报(2015年3期)2015-12-16
凿岩机械气动工具(2014年2期)2014-03-01
河南科技(2014年18期)2014-02-27
河南科技(2014年16期)2014-02-27
河南科技(2014年4期)2014-02-27