基于计算机视觉技术的农业机械自主导航设计
2023-09-19 01:17戴峰
农机使用与维修 2023年9期
戴 峰
(江苏省泰兴中等专业学校,江苏 泰兴 225400)
0 引言
农业生产一直是人类社会中最基本的生产活动之一,随着人口的增长和城市化的加速,农业生产的现代化和智能化已经成为全球农业发展的趋势[1-2]。传统的农业机械已经不能满足现代农业生产的需求,自主导航技术的应用为农业机械智能化和自动化提供了新的解决方案。计算机视觉技术可以通过对图像进行处理和分析,实现对图像中目标物体的识别、跟踪和定位,为机器智能化提供基础[3-5]。因此,将计算机视觉技术应用于农业机械的自主导航系统开发中,具有重要的实用价值和研究意义。
1 国内外研究进展
1.1 国内研究进展
在国内,一些研究机构和企业积极开展了基于计算机视觉技术的农业机械自主导航的研究。2018年南京农业大学开发了基于计算机视觉技术的智能化水稻收割机,能实现水稻的自动化收割;2019年中国农业科学院研发了基于计算机视觉技术的田间玉米叶片病害智能诊断系统,能实现对玉米叶片病害的自动检测和诊断;2020年中国农业科学院提出基于机器视觉和深度学习的高效果蔬菜园林树木智能采摘技术;2020年,海南大洋农业发展股份有限公司开发基于计算机视觉技术的智能化收获系统,能对水稻、玉米等作物进行自主化收割;2021年中国电子科技集团公司开发基于计算机视觉技术的智能拖拉机;2021年,中国农业大学、中国农机化研究院联合开展农业机械智能化和自主化技术研究,其中包括基于计算机视觉技术的农业机械自主导航[6]。
1.2 国外发展现状
目前,国外相关研究机构对农业机械自主导航系统进行了大量研究。2016年澳大利亚昆士兰大学开发了基于计算机视觉技术的牛奶奶牛自动化挤奶系统,能自动检测和识别奶牛的乳房位置;2017年瑞士联邦理工学院开发了基于计算机视觉技术的无人机农业机器人,能自动检测、识别并采摘葡萄;2018年加拿大阿尔伯塔大学和萨斯卡通大学开发了基于计算机视觉技术的马铃薯智能化种植系统,能自动检测和识别马铃薯的品种和生长情况;2019年欧洲农业研究中心开发了利用计算机视觉技术的智能农机,以提高农业生产的效率和质量;2019年美国康涅狄格大学开发了基于激光雷达和计算机视觉技术的玉米自动化收割系统,能实现对玉米的高效、自动化收割。国外的研究和产品开发表明,在农业机械自主导航领域,各国都在积极探索和应用计算机视觉技术,以提高农业生产的效率和质量[7-8]。
2 系统设计
2.1 设计要求
基于计算机视觉技术的农业机械自主导航系统设计需要满足以下要求:
1)精度高。农业机械在自主导航过程中需要准确地识别和定位目标,因此系统需要具备高精度的计算机视觉技术和传感器设备。
2)实时性强。农业机械在行驶过程中需要实时地接收和处理图像信息,因此系统需要具备快速的数据传输和处理能力,能够在毫秒级别内完成图像处理。
3)稳定性好。农业机械在自主导航过程中需要保持稳定,系统需要具备抗干扰和抗振动的能力,能在复杂的环境中稳定运行。
4)可靠性高。农业机械的自主导航涉及到农作物的种植和收获,因此系统需要具备高可靠性和安全性,避免对农作物的影响和损害。
5)易于维护。系统需要具备简单易用的用户界面和维护接口,方便用户进行维护和调试。
6)可扩展性好。随着技术的不断发展和应用的不断扩大,系统需要具备良好的可扩展性,能适应新的技术和需求的变化。
2.2 整体设计方案
基于计算机视觉技术的农业机械自主导航系统的整体控制方案如图1所示,具体包括以下几个方面:
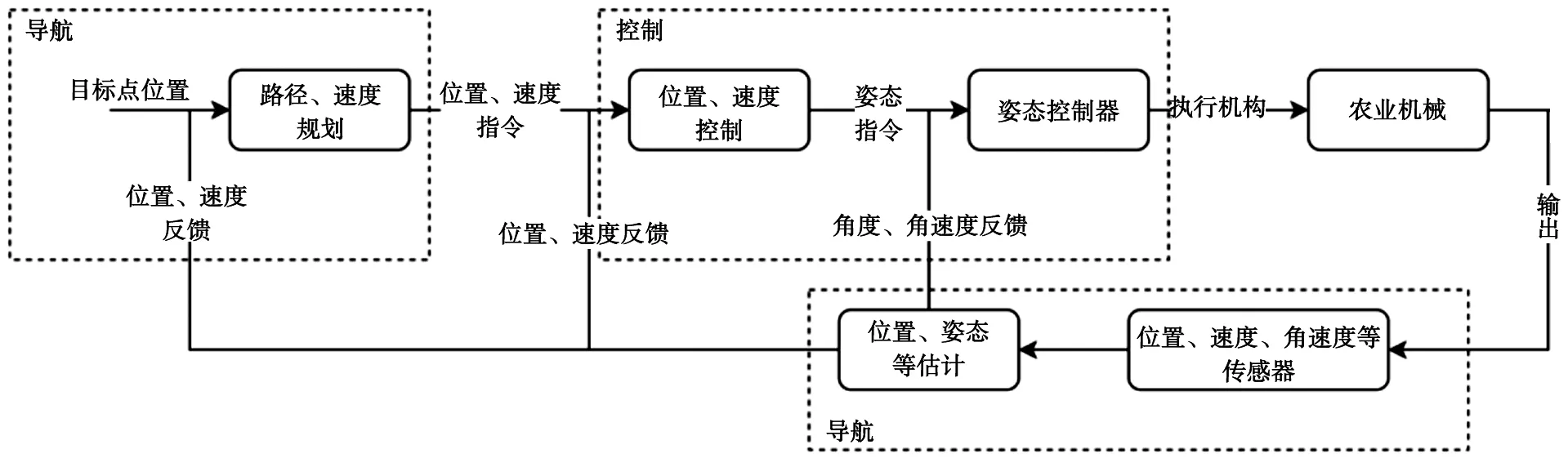
图1 整体控制方案
1)硬件设计。系统需要选择合适的硬件设备,如相机、激光雷达、惯性测量单元(IMU)等。其中,相机用于获取农田的图像信息,激光雷达用于获取农田的三维信息,IMU用于获取农机的姿态信息[9]。
2)软件设计。系统的软件设计包括图像处理、目标检测和跟踪、路径规划和控制系统等。其中,图像处理用于对获取的图像进行处理,目标检测和跟踪用于检测和跟踪农机在农田中的位置和方向,路径规划用于确定农机的运动路径,控制系统用于控制农机的运动。
3)数据传输。系统需要进行数据传输,将获取的信息传输给控制中心,控制中心根据信息进行路径规划和控制。
4)安全设计。系统需要进行安全设计,包括防止碰撞、保护人员安全等。系统需要安装传感器,实时监测农机周围的环境,避免碰撞和危险情况的发生[10]。
2.3 工作原理
整个系统的核心是图像处理和路径规划算法,能够实现对机器的智能控制和作业优化,提高农业机械的作业效率和质量。导航系统工作过程为采集图像数据—图像处理—建立地图—路径规划—控制指令输出,即,使用相机等设备采集作业场地的图像数据,将采集到的图像数据进行处理,包括图像增强、去噪、特征提取等,以获取所需的作业场地信息,如作物行、杂草、障碍物等,根据图像处理得到的场地信息,构建场地地图,确定机器当前的位置和行进方向,根据机器当前的位置和行进方向,规划最优路径,避免与障碍物相撞,并实现高效的作业,最后,根据路径规划的结果,控制机器的运动和作业,输出相应的控制指令。
2.4 关键部件的设计
2.4.1 PID控制模块
基于PID控制器的反馈控制策略是一种常用的控制方法,通过实时反馈系统状态误差并对其进行比例、积分、微分三项控制,以调整系统输出,使系统能稳定地跟踪期望轨迹或状态。在基于计算机视觉技术的农业机械自主导航系统中,PID控制器可以实时监测机械的位置误差和姿态角误差,并通过对机械的控制执行器(如电机或液压缸)施加合适的控制信号,使机械能按照期望轨迹或状态稳定地行驶或转向。
2.4.2 导航软件功能模块
导航软件功能模块主要包括数据收发、路径规划、导航控制和人机交互(图2)。
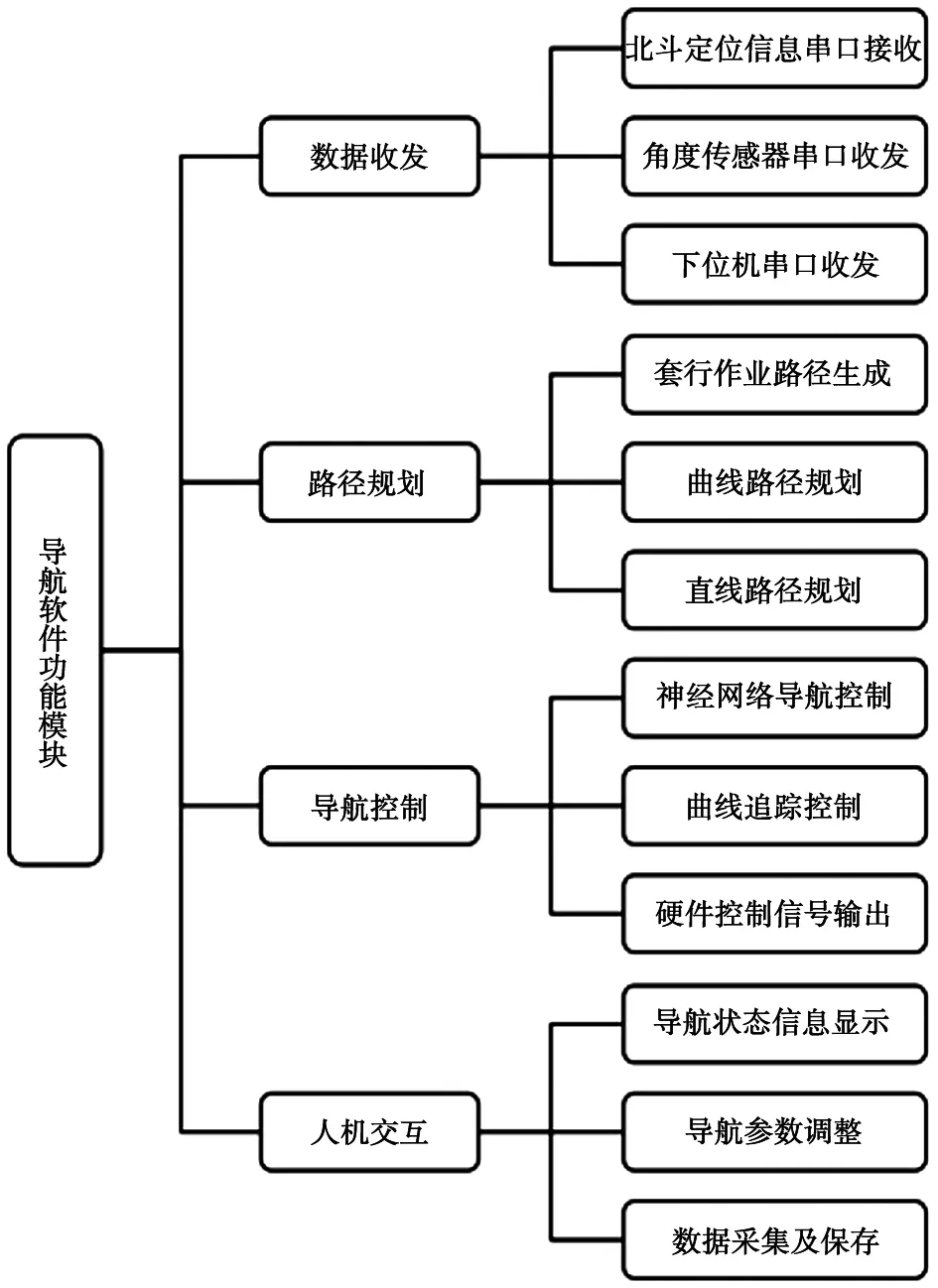
图2 导航软件功能模块结构示意图
1)数据收发模块。负责与传感器进行通信,接收传感器采集的数据并进行处理,同时将控制指令发送给执行机构。
2)路径规划模块。基于农田地形和作物生长情况等因素,通过算法计算出最优的路径规划方案,实现对农业机械的自主导航。
3)导航控制模块。采用PID控制器对机械的运动轨迹进行控制和调节,以实现机械的精确导航和定位。
4)人机交互模块。通过显示器、键盘、触摸屏等交互设备,向用户提供农田信息、机械状态和导航结果等实时信息,同时用户也可以通过输入命令来调整导航参数和设定机械运行模式。
导航软件是实现基于计算机视觉技术的农业机械自主导航的关键部分,它不仅能提高机械的导航精度和运行效率,还能大幅度减少人工操作,降低农业生产成本,具有广阔的应用前景。
3 田间验证试验
3.1 试验方法
为了验证基于计算机视觉技术的农业机械自主导航系统的性能和可行性,进行了田间验证试验。试验采用的农业机械是一台小型收割机,安装了自主导航系统,并配备了相关的传感器和摄像头。按照试验方案进行试验,记录试验数据。试验过程中,监测机械的导航精度和数据采集质量两个测定指标,及时调整控制参数。
3.2 结果与分析
导航精度田间试验结果如表1所示,根据表格中的数据,可以看出在不同的试验条件下,基于计算机视觉技术的农业机械自主导航系统都能够实现较高的导航精度。
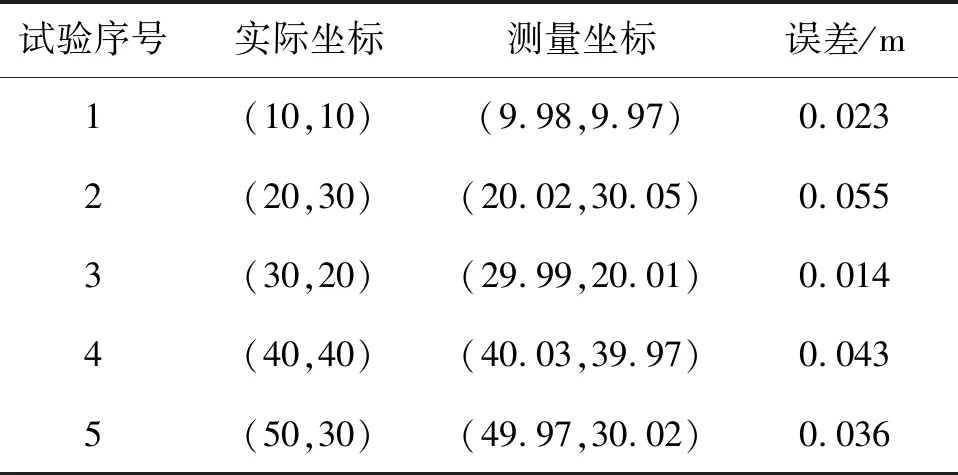
表1 导航精度田间试验结果
数据采集质量结果如表2所示,结果表明,图像清晰度较高,达到90%以上,可以满足农机自主导航的要求;另一方面,图像分辨率达到1 024×768,可以提供足够的图像信息供导航算法使用。但是,采集速率较低,只有5 fps,需要进一步提高采集速率,以提高实时性。
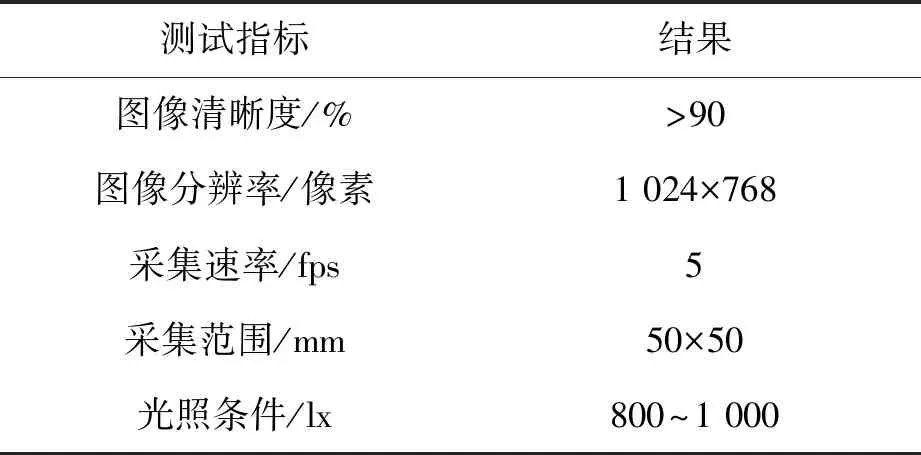
表2 数据采集质量结果分析
4 结论
本文提出了一种基于计算机视觉技术的农业机械自主导航系统,并在田间进行了实验验证。实验结果表明,该系统具有较高的导航精度和数据采集质量,可以有效地提高农业机械的自主导航能力和数据采集效率。通过对实验结果的分析,可以得出以下结论:
1)本文所提出的基于计算机视觉技术的农业机械自主导航系统能实现高精度的导航控制,具有较高的导航精度和稳定性,能满足实际农业生产的要求;
2)该系统采用了多种传感器进行数据采集,能获取丰富的农业生产数据,提高了数据采集质量和效率;
3)本文所提出的系统具有较强的通用性和可拓展性,能适用于不同类型的农业机械,并且可以通过添加新的传感器和算法进行功能扩展和性能优化。
猜你喜欢
小学科学(学生版)(2021年7期)2021-07-28
科技传播(2019年22期)2020-01-14
四川农业与农机(2019年4期)2019-08-29
消费导刊(2017年20期)2018-01-03
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
衡阳师范学院学报(2015年3期)2015-02-10
河南科技(2014年1期)2014-02-27