
一种电动AMT换挡位置自调整控制方法研究
2023-09-19 13:42:49李森乔运乾翟灵瑞翟芸翎解西凤
汽车电器 2023年9期
李森 乔运乾 翟灵瑞 翟芸翎 解西凤
【摘 要】本文介绍一种在电动AMT换挡过程出现堵转时通过位置自调整实现换挡的方法。该方法在满足换挡冲击度要求的前提下,采取先恒定占空比然后通过正负斜率的控制方法冲破堵转位置,若该方法失效,则控制执行机构进行位置回退自调整,以缩短再次重新进入整个换挡过程的时间,并提高换挡单次成功率和AMT换挡可靠性。
【关键词】堵转;位置自调整;换挡成功率
中图分类号:U469.72 文献标志码:A 文章编号:1003-8639( 2023 )09-0043-03
Research on a Self-Adjusting Control Method for Shifting Position of Electric AMT
LI Sen,QIAO Yunqian,ZHAI Lingrui,ZHAI Yunling,XIE Xifeng
(Weichai Power Co.,Ltd.,Weifang 261001,China)
【Abstract】This paper introduces a method to realize shifting of electric AMT by position self-adjustment when there is gridlock during shifting. Under the premise of meeting the requirements of shift impact,the method adopts the constant duty ratio and then the positive and negative slope control method to break through the lock-blocking rotation position. If this method fails,the position of the actuator is self-adjusted to shorten the time of re-entering the whole shift process,and improve the single success rate of shift and the reliability of AMT shift.
【Key words】locked-rotor;self-adjusting position;success rate of shift
作者简介
李森(1986—),硕士,工程师,研究方向为新能源整车测控与标定。
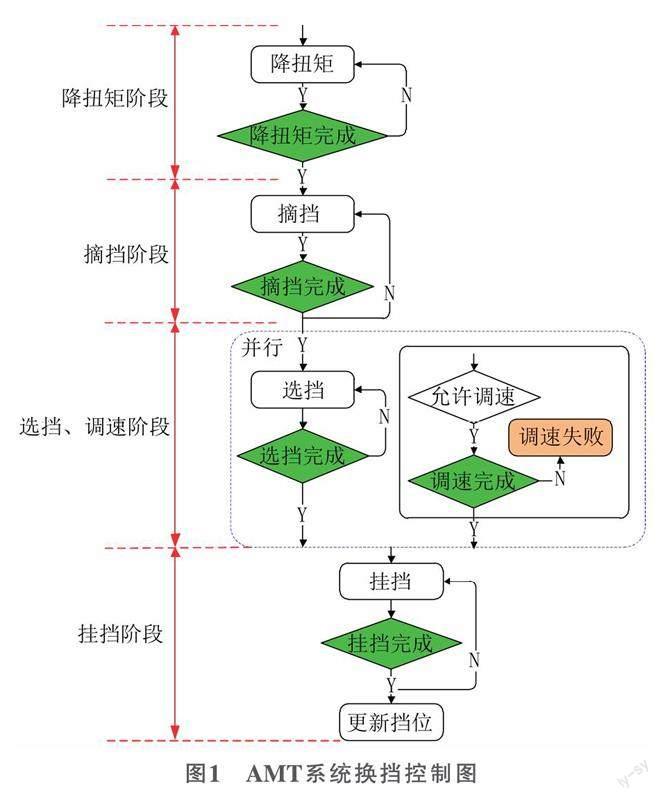
纯电动AMT是电控机械式自动变速器的简称,是一种在齿轮变速器基础上加装控制器的系统。AMT可根据车速、油门、驾驶员命令等参数确定最佳挡位,控制原来由驾驶员人工完成的摘挡、挂挡以及调速等操作,最终实现换挡过程的操作自动化[1]。目前常见的AMT系统换挡控制方法如图1所示[2-3],其主要由降扭矩、摘挡、选挡调速、挂挡等阶段组成。
1 AMT換挡过程分析
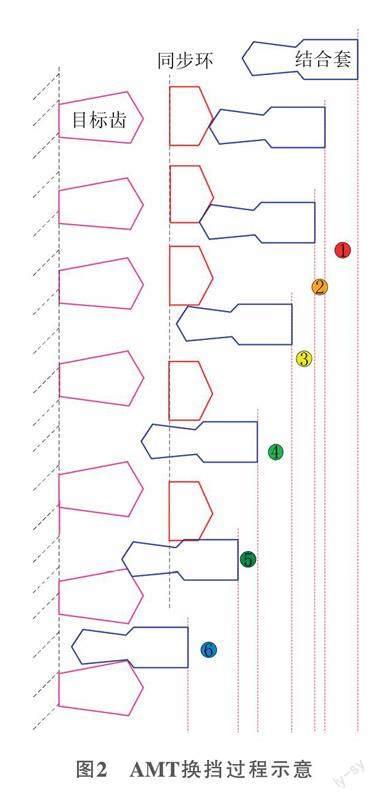
挂挡阶段结合套的位置变化可以大体分为6步进行,分别是摘空挡、预同步、同步、解锁、啮合、换挡完成等过程[4]。AMT换挡过程示意如图2所示。
在挂挡过程中,结合套与目标齿啮合过程中存在如图3所示的情况。换挡时,无论处于哪种情况都与控制精度、MCU调速过程以及变速器硬件等有直接关系,且由于各种外界因素的制约,不能保证每次换挡都能处在某种特定的情况中,因此除了在④的情况下,均可能造成换挡冲击、异响,甚至出现打齿的现象。同时,在①~③的情况下,可能存在堵转的现象,导致单次换挡成功率降低。
2 自调整控制策略
由于换挡过程调速、堵转等原因均可能造成挂挡失败、冲击异响等现象,本文通过优化控制策略,提出一种换挡过程中位置堵转时自调整的方法,提高在换挡过程中的单次成功率。自调整控制策略流程图如图4所示,主要部分详见图中描述。
2.1 堵转的判定
通过换挡电机的电流输出以及位置变化情况,确定是否存在堵转现象。当输出的电流大于规定值、当前位置与上一个步长值的差值大于规定值、当前位置与前N个步长位置值的差值大于规定值时,确定换挡电机处于堵转状态。
2.2 位置变化判定
当系统存在占空比且换挡电机电流大于标定值,当前位置与上一个步长位置之间差值的绝对值大于标定值时,认为位置发生变化。
2.3 补救措施
在确认堵转后,首先增大占空比至标定值(固定占空比一段时间至T1后,然后按照斜率K1控制增大,最终输出占空比为最大值Max并维持一段时间至T3);若上述方法无效(位置无变化处于堵转状态),采取与之相反的方法进行,即减小占空比至标定值(固定占空比一段时间至T4后,然后按照斜率K2控制减小,最终输出占空比为最小值Min并维持一段时间至T6)。在此过程中,任何阶段出现位置变化脱离堵转状态时,即可退出补救措施阶段进入下一阶段;若计数次数(计数次数=进入状态1的次数+进入状态2的次数)大于等于规定值M,则报出相应的故障后直接进入回退过程。
2.4 回退值确定
判定是否能冲破该位置值,若能则不进入回退阶段,冲破该位置值后进入正常的挂挡流程(在满足换挡冲击度的前提下;若否,在正常换挡流程中将冲击度因素作为占空比作补偿);若不能冲破该位置值,则进入回退阶段,回退时以目标挡位位置值与空挡位置差值的一半的绝对值作为基准,当大于该值时回撤N1个步长,否则回撤N2个步长,最大限制值为空挡位置,该方法简单有效。
2.5 回退效果
在电机调速满足要求的前提下,若能进行回退,说明功能实现,回退阶段结束后,按照满足冲击度的挂挡流程进行,提高单次换挡成功率,否则按照斜率K3增大占空比至最大值,若换挡位置出现变化则按照满足冲击度的挂挡流程进行,否则说明机构卡滞,报出相应故障,进行处理。
3 试验验证
将控制策略通过Simulink-RTW生成代码,下载到控制器并在不同变速器系统中进行验证。
图5是在6挡AMT系统中进行验证,从图5中可以看出:变速器在4挡换5挡过程中,换挡位置在2200mV左右时出现堵转,按照上述给定的控制策略增大占空比后发现位置变化,进入正常的换挡过程;在换挡阶段末期(1900mV左右时),由于电机电流超过限定值,进行回退策略,回退后再进行换挡,顺利完成整个换挡过程,整个换挡过程时间约1.2s。
图6是在2挡AMT系统中进行验证,其中图6a为正常换挡过程。从图6b可以看出,变速器在2挡降1挡过程时,挂挡过程中(在3482mV左右时)出现堵转情况,在增大占空比无效的情况下采取自调整策略进行回退,回退位置至3400mV,然后顺利完成换挡动作;从图6c可以看出,TCU进行了2次回退动作后顺利完成换挡,从而提高换挡单次成功率,增加AMT系统的可靠性。
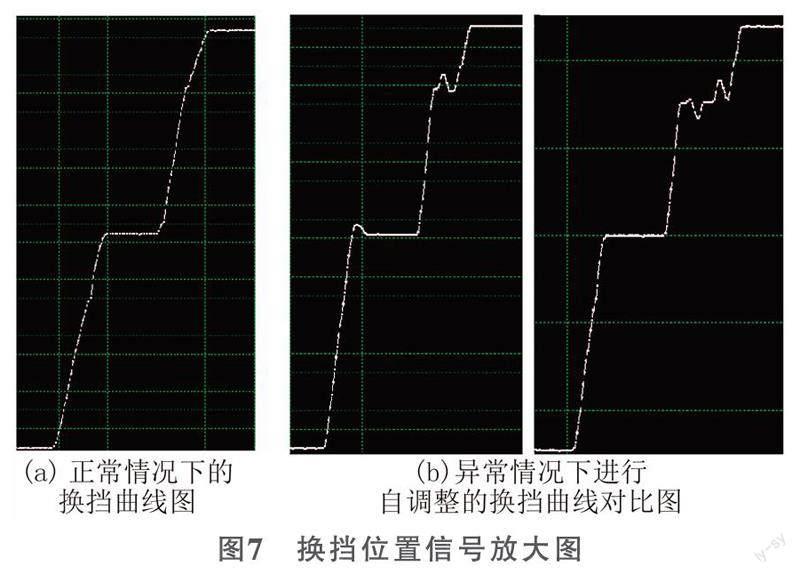
圖7为换挡位置信号放大图。其中,图7a为正常情况下的换挡曲线图,图7b为异常情况下进行自调整的换挡曲线对比图。
4 结束语
通过位置自调整控制策略,可实现电动AMT换挡出现堵转时,通过补救措施对换挡过程继续进行控制,在补救措施失效的情况下进行位置回退的自调整策略,提高单次换挡的成功率,缩短再次重新进入整个换挡过程的时间,提高了AMT产品可靠性。
参考文献:
[1] 刘贻樟. AMT控制技术[M]. 北京:机械工业出版社,2016.
[2] 李志杰,乔运乾,陈国涛,等. 一种提高纯电动AMT换挡性能的方法[J]. 汽车电器,2021(10):44-49.
[3] 崔传宝. 机械式变速器换挡性能评价方法的初步研究[D]. 长春:吉林大学,2011.
[4] 魏光璞,李守成,赵立军,等. 并联式混合动力客车AMT换挡过程分析及其验证[J]. 机械制造与自动化,2016(5):201-203.
(编辑 凌 波)
