
48V重型商用车坡度传感器滤波算法研究
2023-09-19 11:26:35刘静于淼淼
汽车电器 2023年9期
刘静 于淼淼
【摘 要】本文针对重型商用车48V混合动力系统坡度传感器信号易被干扰、随机噪声复杂的问题,对坡度传感器信号的随机漂移模型及自适应Kalman滤波算法进行研究,通过采集数据信息,利用赤池信息量准则(AIC)确定自回归AR模型阶数,考虑所建立的模型具有模型参数和噪声统计特性存在误差的特点,研究一种含有强跟踪滤波渐消因子的Sagu-Husa自适应Kalman滤波算法。经与标准Kalman滤波算法进行对比仿真,表明改进后的滤波算法对模型参数和噪声统计特性不敏感,故该滤波算法能够有效提高48V混动坡度传感器信号精度。
【关键词】48V混动;漂移误差;渐消因子;Kalman滤波
中图分类号:U463.6 文献标志码:A 文章编号:1003-8639( 2023 )09-0049-03
Research on Filtering Algorithm of Slope Sensor for 48V Heavy Commercial Vehicle
LIU Jinga,YU Miaomiaob
(Weichai Power Co.,Ltd.,a.New Energy R&D Center;b.Engine Research Center,Weifang 261061,China)
【Abstract】Aiming at the problems that slope sensor signal of 48V hybrid power system of heavy commercial vehicle is easy to be disturbed and random noise is complex,random drift model of slope sensor signal and adaptive Kalman filtering algorithm are studied. Akaike information quantity criterion(AIC)was used to determine the order of AR model. Considering that the model parameters and statistical characteristics of noise have errors,a Sagu-Husa adaptive Kalman filtering algorithm with strong tracking filter fading factor is studied. The comparison and simulation with the standard Kalman filtering algorithm show that the improved filtering algorithm is insensitive to the model parameters and the statistical characteristics of noise. This filtering algorithm can effectively improve the signal accuracy of 48V hybrid slope sensor.
【Key words】48V hybrid;drifterror;fading factor;Kalman filter
作者简介
刘静,女,硕士,工程师,主要研究方向为新能源动力总成结构仿真分析;于淼淼(1987—),男,硕士,工程师,主要研究方向为商用车混动总成、整车热管理等。
48V混动系统在商用车领域获得越来越广泛的研究与测试,比如在商用车后处理排放测试中SCR电加热供电,48V混合动力系统是此技术路线必不可少的部分,可有效减少整车燃油消耗;再比如E-Turbo技术需依靠48V能量管理,提升E-Turbo在整车动力性、经济性的表现。48V控制信号是执行能量管理的关键环节,其中坡度传感器信号关系整车动力性、经济性、舒适性,是需要重点监控管理的信号源之一。但某重型48V混动商用车在下线检测、功能调试中发现该路信号存在不明噪声问题。
导致该路信号存在不明噪声的主要原因是陀螺仪随机性漂移,陀螺仪是该坡度传感器的重要组成部分,另一部分是MEMS(Micro-Electro-Mechanical System)加速度计[1]。陀螺仪随机漂移通常采用时间序列分析法对数据进行建模[2],并运用Kalman滤波方法减小陀螺漂移误差影响,本文研究一种含有强跟踪滤波渐消因子的Sagu-Husa自适应Kalman滤波算法,提出合理的渐消因子系数,能有效提高整车坡度传感器信号控制精度。
1 陀螺仪漂移数据采集和建模
利用某重型商用车48V混动总成坡度传感器为研究对象,将坡度传感器水平放置,保持静止,以25Hz的采样频率取X轴方向的数据,保存1min的采样数据,取连续600个采样点,做离线分析。按照时间序列建模要求,对该数据进行统计检验和预处理,以得到平稳、正态、零均值的时间序列。对处理后的数据建立自回归滑动平均模型,即ARMA(p,q)。自回归模型表达式[3]如下:
2 Kalman滤波算法和仿真实验
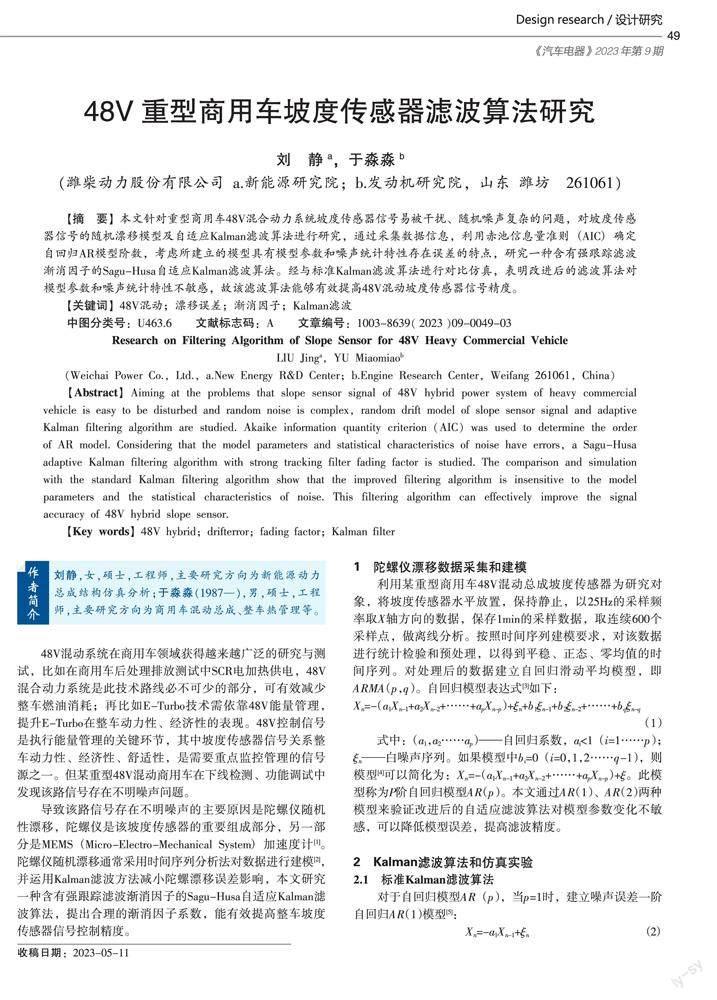
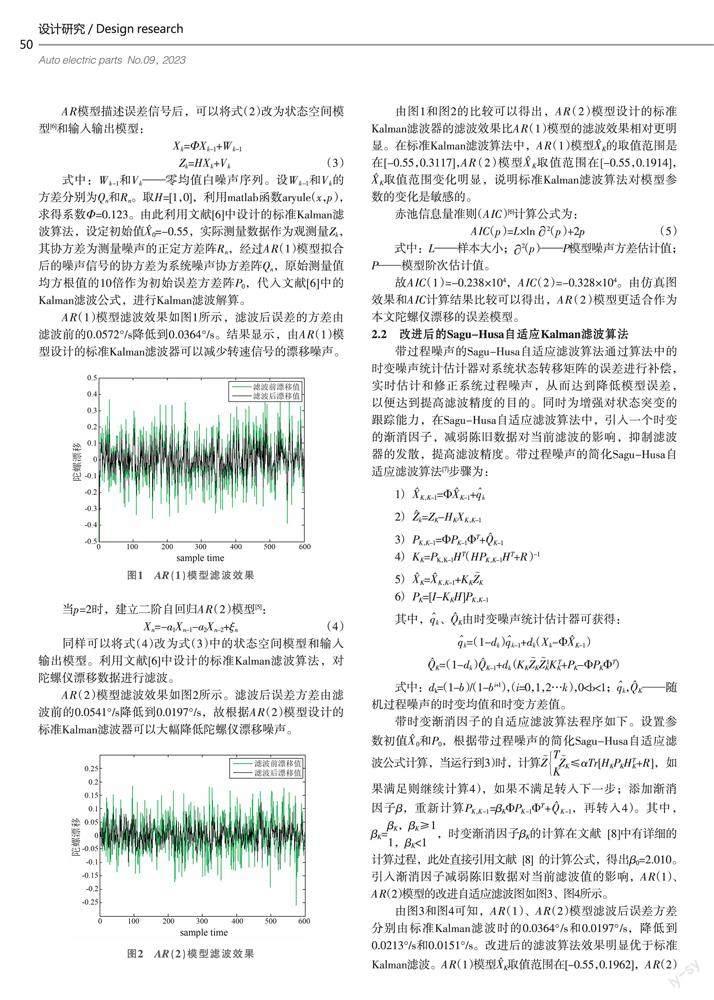
2.1 标准Kalman滤波算法
2.2 改进后的Sagu-Husa自适应Kalman滤波算法
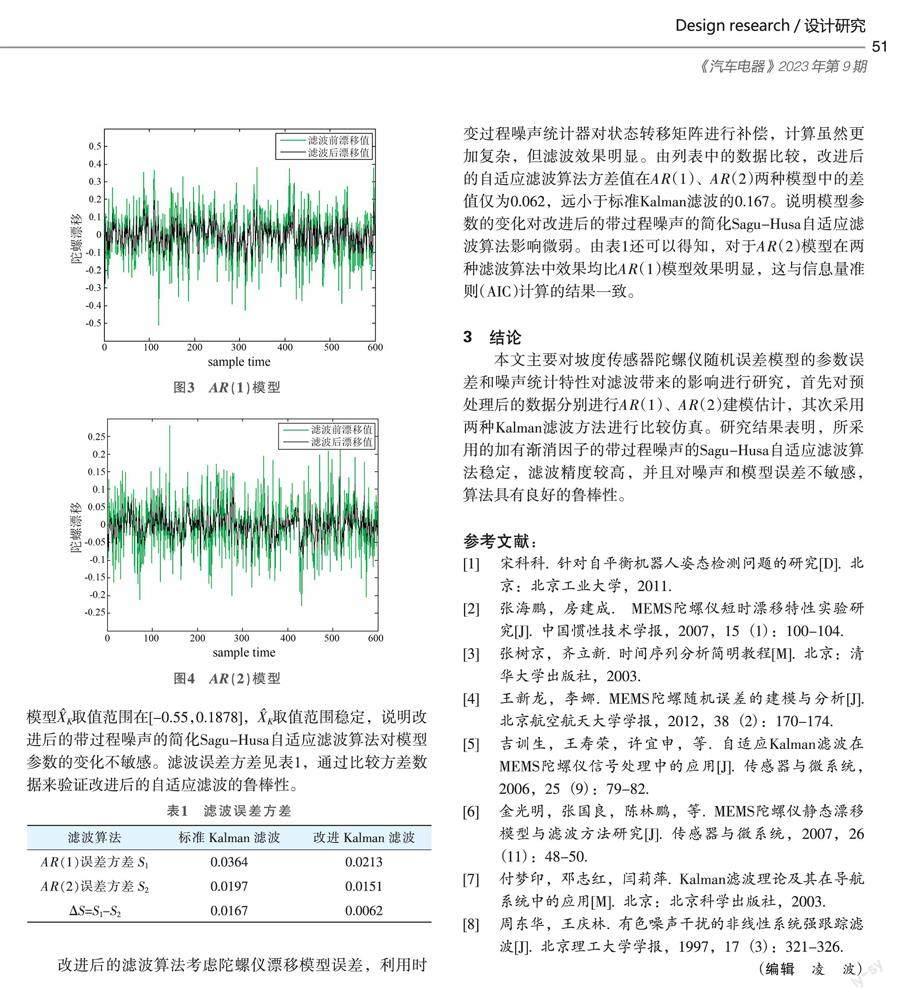
带过程噪声的Sagu-Husa自适应滤波算法通过算法中的时变噪声统计估计器对系统状态转移矩阵的误差进行补偿,实时估计和修正系统过程噪声,从而达到降低模型误差,以便达到提高滤波精度的目的。同时为增强对状态突变的跟踪能力,在Sagu-Husa自適应滤波算法中,引入一个时变的渐消因子,减弱陈旧数据对当前滤波的影响,抑制滤波器的发散,提高滤波精度。带过程噪声的简化Sagu-Husa自适应滤波算法[7]步骤为:
3 结论
本文主要对坡度传感器陀螺仪随机误差模型的参数误差和噪声统计特性对滤波带来的影响进行研究,首先对预处理后的数据分别进行AR(1)、AR(2)建模估计,其次采用两种Kalman滤波方法进行比较仿真。研究结果表明,所采用的加有渐消因子的带过程噪声的Sagu-Husa自适应滤波算法稳定,滤波精度较高,并且对噪声和模型误差不敏感,算法具有良好的鲁棒性。
参考文献:
[1] 宋科科. 针对自平衡机器人姿态检测问题的研究[D]. 北京:北京工业大学,2011.
[2] 张海鹏,房建成. MEMS陀螺仪短时漂移特性实验研究[J]. 中国惯性技术学报,2007,15(1):100-104.
[3] 张树京,齐立新. 时间序列分析简明教程[M]. 北京:清华大学出版社,2003.
[4] 王新龙,李娜. MEMS陀螺随机误差的建模与分析[J]. 北京航空航天大学学报,2012,38(2):170-174.
[5] 吉训生,王寿荣,许宜申,等. 自适应Kalman滤波在MEMS陀螺仪信号处理中的应用[J]. 传感器与微系统,2006,25(9):79-82.
[6] 金光明,张国良,陈林鹏,等. MEMS陀螺仪静态漂移模型与滤波方法研究[J]. 传感器与微系统,2007,26(11):48-50.
[7] 付梦印,邓志红,闫莉萍. Kalman滤波理论及其在导航系统中的应用[M]. 北京:北京科学出版社,2003.
[8] 周东华,王庆林. 有色噪声干扰的非线性系统强跟踪滤波[J]. 北京理工大学学报,1997,17(3):321-326.
(编辑 凌 波)
猜你喜欢
城市公共交通(2023年7期)2023-08-18 02:10:40
车主之友(2022年4期)2022-11-25 07:27:30
汽车实用技术(2022年19期)2022-10-19 07:45:58
车主之友(2022年4期)2022-08-27 00:56:16
销售与市场(营销版)(2022年8期)2022-08-16 06:26:06
车主之友(2022年6期)2022-02-09 04:31:48
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
城市公共交通(2021年3期)2021-04-15 06:39:52
装备制造技术(2020年3期)2020-12-25 05:21:52
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
