
智能网联汽车高精度定位技术及发展趋势
2023-09-19 07:54:47姜国凯和福建季国田田晓笛
汽车电器 2023年9期
姜国凯 和福建 季国田 田晓笛


【摘 要】本文主要阐述智能网联汽车定位系统的重要性,对目前的定位技术方案进行分析,最后提出智能网联汽车对高精度定位的新需求和发展趋势。
【关键词】智能网联汽车;高精度;定位技术
中图分类号:U463.675 文献标志码:A 文章编号:1003-8639( 2023 )09-0001-02
High Precision Positioning Technology and Development Trend of Intelligent Connected Vehicle
JIANG Guokai HE Fujian JI Guotian TIAN Xiaodi
(1. CATARC Software Testing(Tianjin)Co.,Ltd.,;2. CATARC Automotive Test Center(Tianjin)Co.,Ltd.;
3. China Automotive Technology and Research Center Co.,Ltd.,Tianjin 300300,China)
【Abstract】This paper expounds the importance of the intelligent connected vehicle positioning system,analyzes the current technical scheme of positioning,and finally puts forward the new demand and development trend of high-precision positioning for the intelligent connected vehicle.
【Key words】intelligent connected vehicle;high precision;positioning technology
作者简介
和福建(1993—),男,工程师,硕士,研究方向为导航定位及V2X测试评价技术。
1 智能网联汽车定位系统重要性
汽车的电动化、智能化、网联化、共享化正在加速汽车产业的变革,智能网联汽车的发展已成为全球汽车产业竞争的重要战略目标。智能网联汽车从技术层面分为智能化和网联化。智能化主要是指车辆通过自身配置的传感器(摄像头、激光雷达、毫米波雷达、超声波雷达等)能够自主获取和分析车辆内外部的信息,为驾驶员提供辅助决策或者进行自主决策。网联化主要是指车辆采用移动通信技术(LTE-V、5G等)实现车辆位置、车速等信息的交互。
对智能网联汽车来说,安全、稳定、可靠的位置信息是车辆运动决策的基础,是安全行驶的保证[1-2]。高精度定位模块是智能网联汽车的核心模块,也是车辆自主导航的重要支撑。对智能网联汽车高精度定位技术的研究对智能网联汽车的发展和产业落地有着重大的意义。
2 高精度定位技术方案
智能网联汽车定位技术按照定位技术原理不同,可以分为3种:基于卫星信号的定位、航迹推算、环境特征匹配[3-4]。
2.1 基于卫星信号的定位
基于卫星信号的定位是指通过接收卫星信号来进行定位。目前卫星导航定位系统主要有中国的北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)、美国的全球定位系统(Global Positioning System,GPS)、俄罗斯的格洛纳斯卫星导航系统(GLObal NAvigation Satellite System,GLONASS)、欧盟的伽利略卫星导航系统(Galileo Navigation Satellite System,Galileo)。普通的卫星单点定位精度在5~10m,为了达到更高的卫星定位精度,可以采取基于RTK(Real Time Kinematic)的卫星增强定位技术。RTK的原理是通过基准站不断接收卫星定位信号,然后将得到的载波相位测量值发送给移动站,移动站将自身的载波相位测量值与接收到的载波相位测量值进行实时处理,计算得到移动站的精确位置,载波相位差分的定位精度可以达到厘米级。该技术方案的优点是全天候可用、定位精度高、操作简便,但在使用过程中也有一些问题,如外界电磁干扰、信号遮挡、信号多径效应、传输网络差等导致定位精度变差。同时需要在地面建立多个基准站,建设成本及后期维护成本偏高。
2.2 航迹推算
通过惯性测量单位(Inertial Measurement Unit,IMU),主要包含陀螺仪和加速度计。惯性导航系统原理如圖1所示,在运动过程中可以测量出运动物体的角速度和加速度,然后对时间积分可以得到运动物体的移动距离和方位,进而得到当前的位置。该技术方案的优点是不依赖外界信息,也不与外界进行交互,自主导航,输出频率高,可以短时提供高精度。但不足之处是误差会随着时间不断累积,导致误差偏大,且高性能IMU价格昂贵[5]。
2.3 环境特征匹配
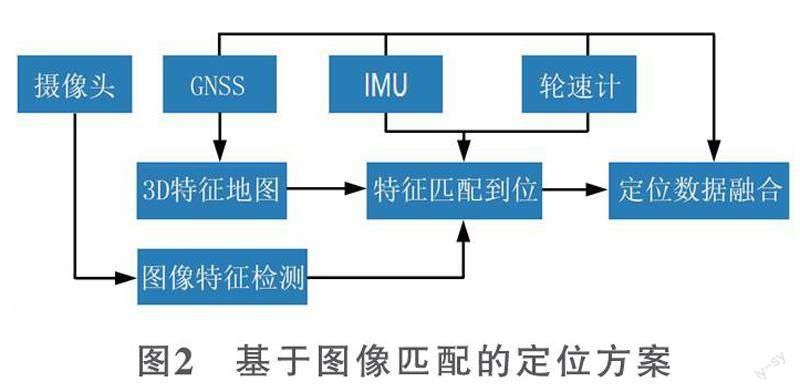
环境特征匹配定位技术主要是指通过实时感知环境特征与已经确定的基准数据进行比对得到车辆当前位置。在应用中,需要其他定位系统给出初始位置信息,减少特征值的匹配计算量。在智能网联汽车应用中使用较多的方案是基于激光点云匹配和基于图像匹配的定位方案。基于激光点云匹配的定位方案,优点是定位精度较高,可以达到厘米级,缺点就是成本昂贵,对环境变化比较敏感,道路改造、雨雪天气等都会影响定位的结果。基于图像匹配的定位方案(图2),优点是成本低,缺点是由于摄像头自身局限性,在逆光、夜晚等场景存在技术瓶颈。
在智能网联汽车定位技术方案中,往往采用多传感器融合的方法实现优势互补,提高稳定性和可靠性。目前常用的有卫星定位、激光雷达、毫米波雷达、摄像头、超声波雷达等。不同传感器在定位方面优点与不足如表1所示。多传感器融合的定位终端常见系统架构图如图3所示。
3 智能网联汽车对高精度定位的新需求及发展趋势
随着智能网联汽车的不断发展,对导航定位系统提出了更高的要求。
1)定位系统根据具体功能需求,需要提供车道级别甚至厘米级的高精度定位。
2)地图信息需要更丰富、更准确的道路环境信息,用来实现辅助环境感知和路径规划。
3)路径规划相比于传统的米级定位精度需要规划出高精度、连续的轨迹。
4)定位的实时性——对时间同步的需求,实时性不好会降低定位的精度。
5)定位的可靠性,要求在復杂场景依然有较高的定位精度。
6)对GNSS防欺骗的需求,保障行驶安全。
7)对功能安全的需求。
由于每种定位技术的技术原理不同,单一定位技术无法满足高级别自动驾驶车辆对全天候复杂环境下高精度定位及安全冗余的需求。多传感器融合高精度定位终端融合高精度地图匹配、图像识别、IMU惯性导航、5G NR +V2X通信等多项技术于一体的定位是未来的发展趋势,为高级别自动驾驶提供定位感知融合能力。
参考文献:
[1] 邓天民,杨其芝,方芳,等. 基于非线性自适应回归神经网络的GPS/IMU组合导航方法[J]. 科学技术与工程,2019,19(24):274-280.
[2] 王艺帆. 自动驾驶汽车感知系统关键技术综述[J]. 汽车电器,2016(12):12-16.
[3] 李晓晖,方芳,邓天民. 基于RNN的智能网联汽车高精度定位方法[J]. 汽车工程学报,2019,9(4):260-267.
[4] 赵佳,刘清波. 自动驾驶汽车高精定位导航技术路线分析[J]. 客车技术与研究,2018,40(4):8-10.
[5] 杜习奇. GPS与捷联惯导组合导航系统研究[D]. 南京:南京理工大学,2004.
(编辑 凌 波)
猜你喜欢
中国科技博览(2018年10期)2018-03-28 10:57:42
科技视界(2017年29期)2018-01-18 06:10:26
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
汽车科技(2017年3期)2017-06-12 12:41:56
中国新技术新产品(2017年2期)2017-01-20 18:21:07
软件(2016年4期)2017-01-20 09:23:15
山东工业技术(2016年23期)2016-12-23 17:32:10
软件导刊(2016年9期)2016-11-07 17:46:50
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
