悬挂式隧道消防机器人结构设计及运动学分析
2023-09-18 21:42:26洪晓宇
现代信息科技 2023年15期
关键词:结构设计
洪晓宇

摘 要:针对隧道内发生火灾时消防人员无法快速进入内部实施救援的问题,设计一种新型悬挂式隧道消防机器人,并对所设计的机器人进行了运动学仿真和关键部位的有限元分析。采用红外成像技术,结合温度传感器以及烟雾传感器,可实现火点自动探测及火源自动捕捉。通过无线通信技术将内部信息向外界实时传输,为消防人员快速制定消防策略提供了有力的依据。此外,该机器人设置有消防水炮,能及时对火点进行有效控制,防止火情进一步扩大,提高了灭火效率,可有效保护消防人员和受灾群众的生命财产安全。
关键词:消防机器人;结构设计;运动学分析
中图分类号:TP242 文献标识码:A 文章编号:2096-4706(2023)15-0162-04
Structural Design and Kinematic Analysis of Hanging Tunnel Fire Fighting Robot
HONG Xiaoyu
(Beijing Haidian District Fire Rescue Detachment, Beijing 100080, China)
Abstract: In order to solve the problem that firefighters cannot enter the tunnel quickly when fire breaks out in the tunnel, a new type of hanging tunnel fire fighting robot is designed. Kinematics simulation and finite element analysis of key parts of the robot are carried out. Using infrared imaging technology, combined with temperature sensor and smoke sensor, it can realize automatic fire detection and automatic fire source capture, and transmit internal information to the outside world in real time through wireless communication technology, which provides strong basis for firefighters to quickly develop fire strategies. The robot is equipped with fire water cannon, which can effectively control the fire point in time, prevent the fire situation from further expanding, improve the fire extinguishing efficiency, can effectively protect the lives and property safety of firefighters and disaster victims.
Keywords: fire fighting robot; structural design; kinematic analysis
0 引 言
隨着社会经济的快速发展,国内公路隧道的数量急剧增加,隧道消防已成为人们关注的热点话题。隧道内发生火灾时,由于受空间、照明等多种条件的限制,消防人员很难及时扑灭火源。火势蔓延产生的大量浓烟将会积聚在隧道内部,甚至会导致隧道坍塌或汽车爆炸,从而引发更为严重的灾难事故,对人民生命财产安全构成严重威胁[1]。
为有效解决隧道消防问题,消防行业相关人员借助先进技术提高其对突发事件的应对能力。目前,国内外研发出大量的灭火用智能消防机器人,例如,国内推出的RXR-M40D-1型消防灭火机器人、多功能消防灭火机器人以及国外研究的人形消防机器人[2,3]等,采用外部遥控等方式实现对这些产品的操控,机器人内部设置有火源探测器及可视化摄像头等多种智能元件,消防人员可在外部安全区域进行消防作业,以保障消防人员的生命安全。但以上设备在隧道消防中存在明显不足,因为消防机器人进入隧道后视线会因火灾产生的浓烟而严重受阻,路面上散布的爆炸残留物阻碍消防机器人进一步接近火源。针对这一问题,本文提出一种悬挂式隧道消防机器人,内置用于检测火灾的火源探测器,能够快速检测到火源位置。一旦发生火灾,该消防机器人能够迅速移动到火焰上方,代替消防员施行灭火操作,最大限度地遏制火势蔓延,保障人民生命财产安全[4]。
1 消防机器人工作原理
针对隧道内部发生火灾的特点以及人们对隧道内部消防系统的需求,需要着重考虑以下几方面事宜:
1)隧道内空间狭小,通风条件差,一旦发生火灾,火势很容易蔓延。
2)隧道内可燃物质(如汽车、轮胎等)较多,容易引发火灾。
3)隧道内有大量的车流,疏散起来比较困难。
4)人们对隧道内部消防系统的设计具有较高的要求,既要保证消防效果,又要尽可能减少人员伤亡。
综上,最终确定该悬挂式隧道消防系统的结构包括导轨、消防机器人、隧道火灾探测及报警系统。导轨可以为机器人提供运动轨迹,使其能够快速到达火源处进行灭火;消防机器人可在火场内寻找着火点执行灭火操作,通过装备上安装的相机和传感器实时获取火情信息,帮助指挥部及时做出正确决策;隧道火灾探测及报警系统可实现对整个隧道内火情的监测,及时发现火灾并启动消防机器人进行灭火。这样的消防系统不但能够快速响应火情,而且还能有效降低消防员的风险,提高灭火效率,保障隧道交通安全。
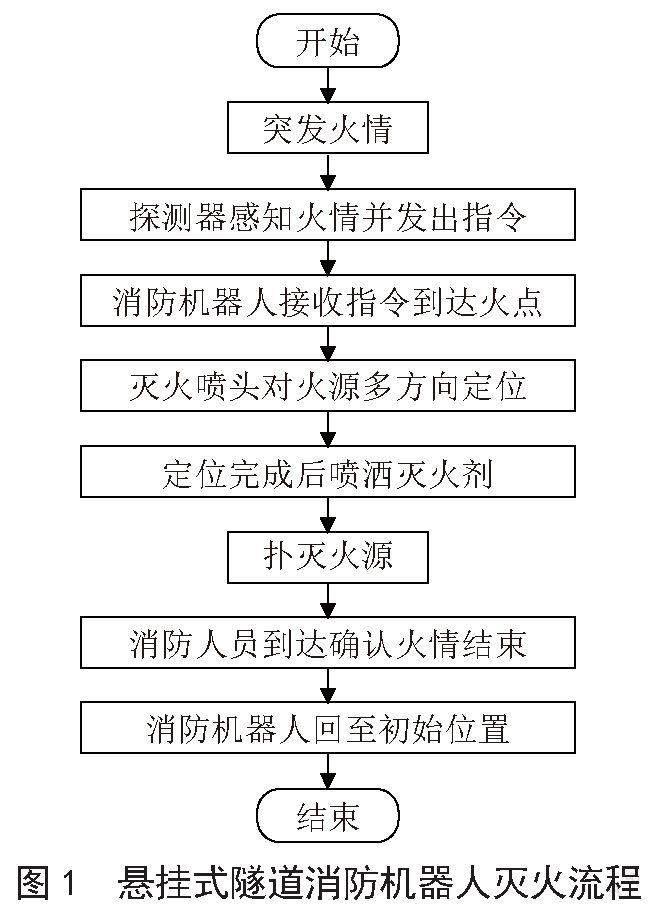
当隧道内突然发生火灾时,隧道内部设置的火警探测器可提前感知火灾情况。火警探测器发送火情提醒及火灾现场相应的电脑方位信息,隧道消防机器人接收到指令后通过预定轨道移动至火焰上方等待执行灭火工作。消防机器人内置的火源探测器可感知火焰位置,调整机械臂对准火焰根部准备喷洒灭火剂。灭火喷头喷洒灭火剂,并实时调整喷头位置,直至火焰完全熄灭。待消防人员就位确认火情结束后通过警情系统进行重置,消防机器人返回至初始位置,灭火工作结束。悬挂式隧道消防机器人灭火流程如图1所示。
该消防机器人主要由滑轨、悬挂底座、水平转台、机械臂及灭火喷头五部分组成,各部分的运动学关系为:悬挂底座可以在滑轨上前后滑动,水平转台连接在悬挂底座上并能沿竖直方向转动,机械臂连接在水平转台上并能沿水平方向转动,灭火喷头与机械臂通过球副连接,可沿连接点进行360?旋转。
2 悬挂式隧道消防机器人设计及有限元分析
悬挂式隧道机器人由机械结构和控制系统两部分构成。其中,机械结构是整个机器人的核心部分,包含多个执行机构、传动装置和控制电路等部件,承载着整个机器人的重量及其运动目标的实现。机器人的控制系统由软件和硬件两部分组成,具体包括控制芯片、传感器、驱动电机等多个模块,用于实现机器人的自主控制和远程操作。
2.1 悬挂式隧道消防机器人控制系统设计
基于隧道内部火灾的特点以及人们对隧道内部消防系统的设计需求,最终确定该隧道消防系统由导轨、消防机器人、隧道火灾探测以及报警系统组成。
悬挂式隧道消防机器人控制系统需要实现对水平转台、机械臂和灭火喷头运动控制的目的,使灭火喷头按预定的轨迹运动,达到及时灭火的目的,同时能够对自身状态及周围环境进行感知,还要控制报警装置、照明装置的运行以及控制网络数据的传输。隧道火灾探测数据采集系统由超声波测距模块、环境信息检测模块、路标检测模块和FRID模块组成,系统结构框图如图2所示。当隧道内发生火灾时,通常会产生光、热、烟雾等挥发物,因此需要使用多种传感器进行检测。其中,火源探测传感器用于检测与识别火源;温度传感器用于检测空间环境的温度变化;湿度傳感器可测量空气的湿度;环境光传感器能够感知光线的亮度和颜色;气体传感器可以检测空气中是否存在某些危险气体。同时,FRID模块可以实现对物品的快速识别和追踪管理,路标检测模块能够提供位置信息,从而让整个系统更加智能化和高效化。通过这些传感器和模块的相互协作,能够实现对隧道内环境参数的实时监测,从而有效预防和处理火灾事件,保障人员和设施的安全。
该悬挂式隧道消防机器人对火源的识别主要通过所搭载的火源探测器实现,火源探测传感器上有可见光、红外光及红外热成像三种摄像头[5]。在火源识别过程中,三个摄像头同时工作获取对应图像并进行图像的识别与处理,同时结合红外热成像图像的温度特征实现对火源的识别。
2.2 悬挂式隧道消防机器人结构设计
2.2.1 悬挂底座及转台设计
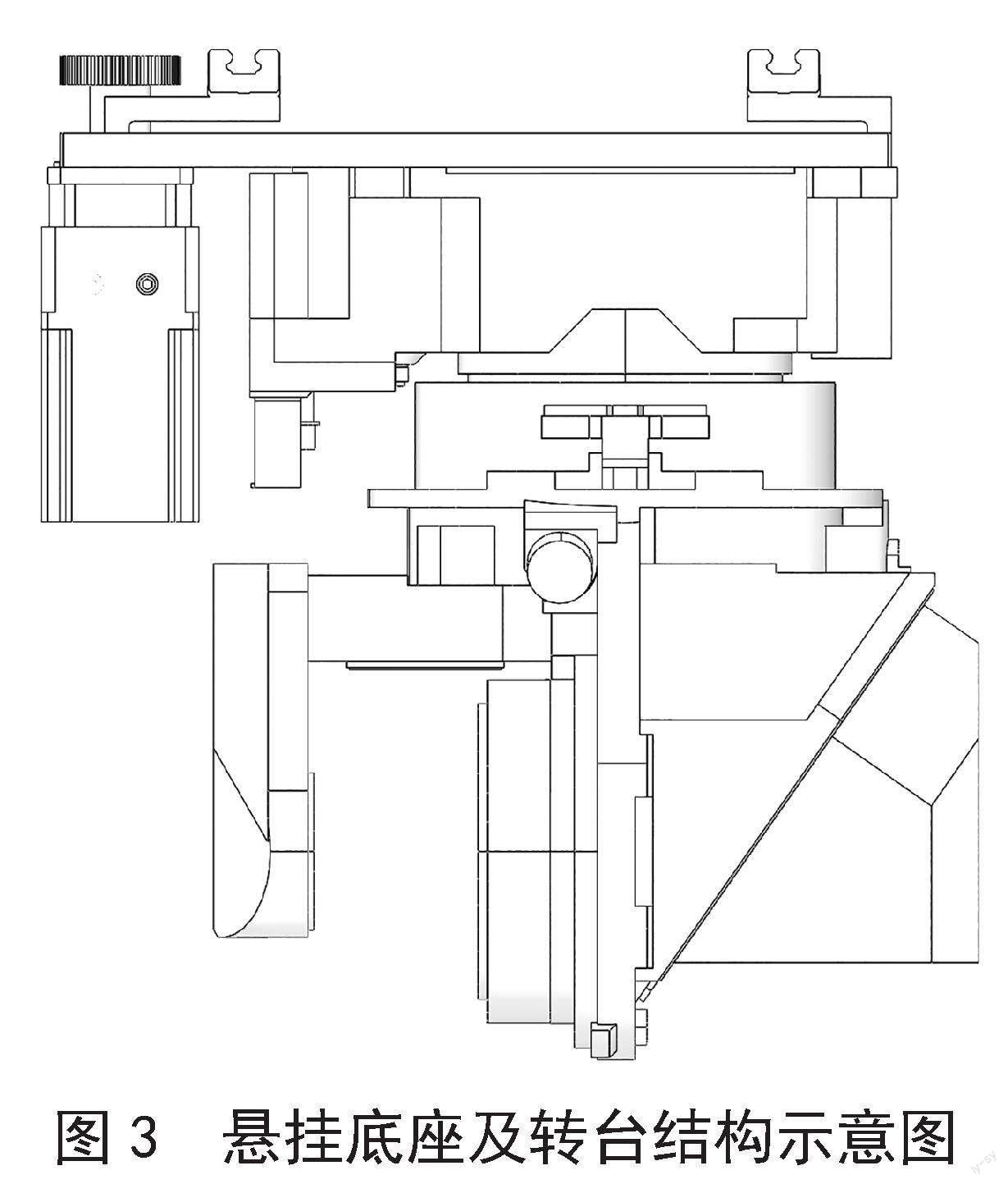
悬挂式隧道消防机器人的悬挂底座是安装各个部件的平台,是整个消防机器人悬挂在滑轨上的关键组成部分,需要能够稳定支撑其他各个功能模块并承受机器人自身的重量。为减少机器人对滑轨的压力,整体设计要求结构稳定的同时保持装置轻量化。因此该部分结构有承载要求,同时该结构上部要在滑轨中滑动,都要求其有足够的刚强度,所以材料选用高强度的铝合金。悬挂底座要与水平转台相连,水平转台需沿其竖直轴做旋转运动,所以将底座设计成圆柱状。悬挂底座及其转台的结构如图3所示。
2.2.2 机械臂及灭火喷头设计
悬挂式隧道消防机器人位于隧道上方,在灭火过程中通常会受火源高温烘烤、高温气流等多方面的影响,同时也承受着巨大的弯曲力。为保证消防机器人可以正常完成灭火操作,在进行结构设计时应做以全面考虑,故消防机器人手臂及灭火喷头选用空心薄壁矩形框体和圆管,既能有效降低装置重量,又能提高其弯曲刚度和扭转强度。消防机器人及灭火喷头结构示意图如图4所示。转台转动对火源进行水平定位的同时,机械臂同步工作开始纵向转动,对火源根部进行垂直定位,使灭火喷头的喷口对准火源。为实现该功能,机械臂与转台之间通过转动副连接,机械臂与灭火喷头之间通过球副连接。
2.3 转台减速机构设计及有限元分析
在悬挂底座与转台之间有可水平旋转的减速机构,消防机器人到达预定位置后,转台开始水平旋转,对火源位置进行水平定位。考虑到转台有传动稳定性及旋转速度的要求,该减速机构采用齿轮传动方式实现减速。根据机器人的工作要求和选用的电机型号,以及减速器的传动比要求,设计齿轮的大小和数量。根据悬挂式隧道消防机器人各个部件的重量、约束力等要求,对齿轮减速机构进行静强度分析。使用三维数字化建模软件建立转台减速机构齿轮模型,设置格式为*.step并导入有限元分析软件。对导入的CAD模型划分有限元网格,将网格类型设置为四面体网格,设齿轮啮合时齿轮间的摩擦系数为0.15。齿轮材料为结构钢,其弹性模量为2.1E11Pa,泊松比为0.3;齿轮组传递扭矩为2 N·m。对所建立的有限元模型进行静力学分析,仿真结果如图5所示。
由图4可知,该模型的最大位移为0.21 mm,最大位移发生在小齿轮的边缘位置,在齿轮啮合的其他位置结构变形量很小,基本符合实际情形,满足刚度条件,能够稳定运转。该模型等效应力最大为11 MPa,发生在齿轮啮合接触位置,满足强度要求。其他大部分区域的等效应力都比较小,符合实际情形,在上述载荷工况条件下,该模型能够稳定运行。
3 悬挂式隧道消防机器人动力学分析
将所建立的悬挂式隧道消防机器人三维CAD模型导入多体动力学软件MSC.Adams,定义各部件间的约束副,并施加相应的驱动力,进而建立机器人的运动学仿真模型,对该结构进行运动学分析。如图6所示,通过固定副对滑轨进行固定,在悬挂底座与滑轨之间设置移动副,悬挂底座可以在滑轨上左右滑动。在悬挂底座与水平转台之间设置转动副,转台可以在水平方向上进行360?旋转。在转台与机械臂之间设置转动副,转动方向为纵向。在机械臂与灭火喷头之间设置球副,实现全方位转动。驱动电机通过MSC.Adams中的驱动Joint Motion来定义,控制系统通过软件中的controls toolkit来定义。
在驱动Joint Motion中添加驱动函数,机器人在驱动和控制系统作用下实现既定工作目标。机器人运动学仿真分析结果如图7所示。
由图7可知机器人能够满足预定功能,机械臂及灭火喷头能够实现全方位转动,结合转台水平横向转动,灭火喷头基本可实现火点全覆盖。
4 结 论
本文设计的悬挂式隧道消防机器人是一种能够在隧道内进行灭火和信息传递的智能机器人。通过对消防机器人的灭火流程进行研究和分析,设计了该消防机器人的机械结构及控制系统,并根据所设计的机器人模型进行了运动学仿真及关键结构的有限元仿真。结果表明,该悬挂式消防机器人可以满足灭火需求,其水平旋转减速机构齿轮能够承受所需的载荷,结构设计合理。这些结果证实了设计方案的正确性和可行性,同时也为机器人的进一步优化和改进提供了指导和参考。在物联网技术的加持下,该悬挂式消防机器人还具备实时传递信息的能力,能够将隧道内部的情况和相应数据传递到外部。这意味着消防人员可以更快速、更准确地掌握火情,制定更有效的消防策略和应急措施,遏制火势蔓延,不仅可以弥补消防人员数量不足或无法到达现场等不利因素的影响,而且还能通过自身的高效性和智能化特点提高消防工作的效率和安全性,最大限度地保障人民群众生命财产安全。
参考文献:
[1] 付婷.悬挂式轨道灭火机器人喷头机械结构设计及优化 [D].沈阳:沈阳理工大学,2022.
[2] 方江平.消防灭火机器人研究进展 [J].今日消防,2020,5(3):19-22.
[3] 陈庆暖.消防灭火机器人及其应用 [J].消防科学与技术,2018,37(5):644-646.
[4] 侯天阳.基于物联网技术的灭火机器人控制与监测系统的研发 [D].沈阳:沈阳理工大学,2022.
[5] 李瑞,刘琦,袁文正,等.新型智能消防灭火机器人设计及实现 [J].南京理工大学学报,2022,46(5):553-560.
猜你喜欢
建材发展导向(2023年6期)2023-03-31 02:51:38
建材发展导向(2022年6期)2022-04-18 08:17:26
建材发展导向(2021年13期)2021-07-28 07:15:50
建材发展导向(2021年11期)2021-07-28 06:57:42
防爆电机(2020年4期)2020-12-14 03:11:14
中国核电(2017年1期)2017-05-17 06:10:04
电子制作(2016年1期)2016-11-07 08:43:05
专用汽车(2016年5期)2016-03-01 04:14:49
专用汽车(2016年5期)2016-03-01 04:14:48
中国房地产业(2016年2期)2016-03-01 01:25:23