
基于无人机的大比例尺测图技术研究
2023-09-16 10:27李显军
科技资讯 2023年17期
李显军
(阳春市自然资源测绘中心 广东阳春 529699)
作为一种新兴载体,无人机在传统农林作业、工业调查和土地资源调查、智慧城市、数字考古、应急救援和救灾、3D现实、城市规划、新农村建设、物流配送、地理和国情监测等应用领域保持了强劲增长[1]。无人机低空遥感数字航空摄影测量系统已成为获取地形测量数字成果的重要手段之一。无人机灵活、高效、快速,它不需要在特殊机场起降,还可以手动起飞、弹射器、降落伞、滑翔和垂直起降。基于无人机系统,它避免了飞行员的人身安全风险,因此,在小区域和人工操作困难的区域快速获取高分辨率图像具有明显优势。随着无人机硬件技术和高精度GNSS定位技术的发展,将高精度GNS 定位模块应用于无人机,结合GNSS 辅助空中三角测量技术,不仅可以有效减少图像控制点的数量,甚至避免图像控制,还可以大大提高无人机航测的精度。经研究表明:Topcon Sirius Pro 航空测绘系统提供了一种集成解决方案,可以在没有地面控制点的情况下自动生成DSM,并且当图像的地面分辨率优于5 cm时,可以满足1∶500测绘规范的精度要求[2]。
本文以某地区1∶500 测绘任务为基础,根据工作环境和设备条件,设计了消费级四旋翼无人机的航空摄影测量方案,并设置了足够的控制点,以提高绝对定向精度,保证数字产品精度的可靠性,并对关键测绘环节进行精度分析,验证测绘方案的有效性和实用性。
1 项目概况
本项目研究区位于广州市的一个区,面积约为0.86 km2。在研究区内,北部有工业企业,中部有林地,西南部有工业企业,东南部有机车停机坪。环境复杂,具有许多典型和代表性地物特征。该项目要求将该地区的平面坐标标记为广州城市坐标系,指定为1985年的国家高度标准,用于1∶500比例的地图绘制[3]。
本项目在消费级多旋翼无人机上配备了自主云平台和摄像头,确保了稳定的空中拍摄。DJI Inspire2 无人机配备Zenith X5S PTZ 摄像头和松下Lumix 15mm/1.7镜头。相机的视角为72°,相当于35 mm相机的标准焦距,像素数为5280×3956,像素大小为3.27897 μm。
2 项目实施
根据消费级多旋翼无人机的航空摄影特点、项目区域现状、现有信息和任务要求,设计了项目实施流程,项目生产和实施可分为3个部分,如图1所示。
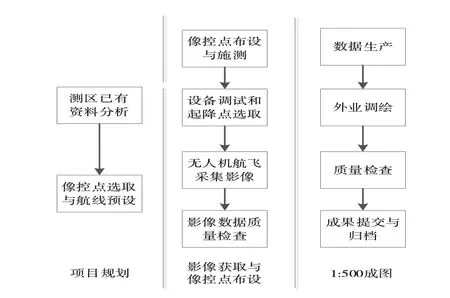
图1 项目实施方案流程
2.1 项目规划
2007 年,测量区域有一张1∶500 的DLG 图。平面坐标系为广州市坐标系,高程系统为1985年国家高程标准。然而,由于研究区域的地形变化很大,现有数字电路只能发挥较小的作用。该项目区域位于广州连续运行参考站(CORS)网络覆盖区域内,定位精度超过1 cm。在测量区域的东北角,有一个保存完好的二级参考,可用于校准和控制测量[4]。
根据本次采用的消费级四旋翼无人机GNSS 定位信息精度差、采集影像像幅小、测区情况复杂等因素,为保证测图精度计划在测区布设控制点132个,如图2所示,后期可用作像控点、检查点和质检点。为易于分辨和识别,地面控制点标志采用黑白两种颜色进行标识可形成良好的色彩反差,地面控制点标志和设计布控位置如图2所示。
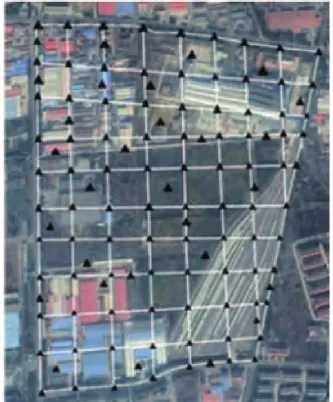
图2 地面控制点位置分布设计
研究区域的地理位置在西南、东南、东北部较低,在西北角缓慢增加。该区域最低点与最高点的差距不超过20 m。在这个区域的中部,东西方的标志表示那个区域的中部。测量区域在飞行高度范围内,最大飞行高度不得超过120 m。为确保安全,满足项目需要,项目规定测量区域中部东西向道路作为起飞和降落点使用,飞行高度100 m。飞机的最大飞行速度提高了位置稳定性。根据假定的高度计算得到的图像是否满足图形要求,取决于高度和地面分辨率。
式(1)中:H为摄影行高,单位为m;f为镜头焦距,单位为mm;GSD为地面分辨率,单位为m;a为像元尺寸,单位为mm。
根据项目相机参数、航高和公式(1),并在已有地形图上得出预计起降场地在整个测区中高程处于中间位置,故可以得出测区内地面分辨率在0.02~0.028 m之间,小于0.05 m,满足《基础地理信息数字成果1∶500 1∶1000 1∶2000 数字正射影像图》(CHT 9008.3-2010)的要求。设计飞行航高为100 m,不仅可以提供高分辨率影像从而提高内业成图时平面位置精度,而且满足测区限航高度的要求保证飞行的安全。预设航向重叠 75%、旁向重叠65%。
2.2 数据获取
根据为项目设计的地面检查点分布和现场实际情况,共建立了108个检查点。广州CORS系统用于实时动态(RTK)测量。用于RTK测量的接收机具有±(10+1×10-6)mm 的水平精度和±(10+1×10-6)mm 的高精度。测量由控制点进行,对各点进行3次测量,然后取平均值。地图坐标系是广州市的坐标系。高度由异常高度值校正,以获得低于1985 年国家高度的日期高度。有关地面控制点的实际布局如图3所示。

图3 地面控制点位置分布
航摄时天气晴朗,西南风1~3级,在地面控制点标航空摄影期间,天气晴朗,西南风1~3级。插入现场控制点面板后,检查无人机和摄像机的状态,根据规划路线将无人机从东西调查区中心提升,收集图像数据。在成像过程中,技术人员通过地面站实时监测无人机运行状态,密切监测无人机状态、风速、高度和速度指示器。如果发现有任何异常,必须立即判断并处理。拍摄中的实际飞行时间为4TRI,从11∶30~13∶45。同时,由于阴影区域小,但光线强,为了控制入射光量,避免过度曝光,必须在正式收集前调整适当的光圈。获得了1 546张地面分辨率大于0.03 m的原始照片。
现场对飞行数据进行排序,检查飞行路径与参数是否一致,是否缺少节拍。检查图像质量是否模糊或曝光过度。如果质量没有问题,就执行空拍任务。
2.3 数据生产
在生成数据之前,检查原始图像的质量,并组织定位定姿系统(Positioning and Orientation System,POS)数据和检查点数据。导出后,软件可将POS 数据的平面坐标转换为项目所需坐标系测量区域的7个参数。验证了POS数据中的总高度偏差,特别是高度偏差过大,可以根据起降地点的实际高度和导航高度进行校正[5]。在空中三角测量过程中,通过调整和优化控制点设置,最终从108 个实际测得的点中选取38 个点作为照片控制点,15 个点作为控制点。照片检查站、调查区域、照片检查站、检查站分布如图4所示。黑线框是元素的测量区域,点表示照片控制点,三角形表示照片控制点,正方形表示控制点。
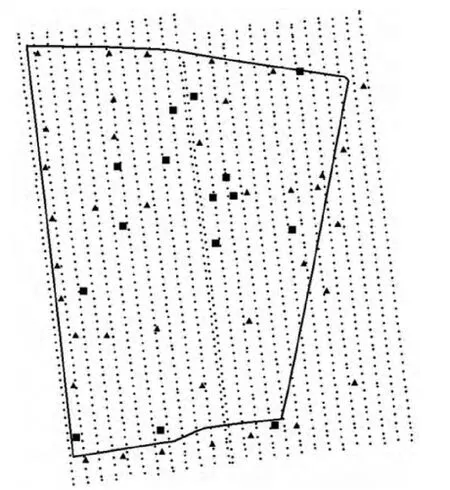
图4 航带分布和像控点、检查点分布
为了提高内业成图的精度,本项目生成平均地面采样间隔为2.17 cm 的数字表面模型(Digital Surface Model,DSM)和数字正射影像(Digital Orthophoto Map,DOM),具体如图5所示。
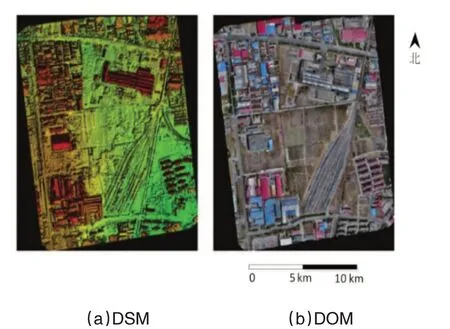
图5 DSM和DOM
项目数字线划图利用EPS地理信息工作站进行生产,平面点位通过导入DOM 进行采集绘制,高程通过生成的点云进行手工提取高程点,数字线划图成果如图6 所示。项目生产中,利用采集的影像生成测区的三维模型,辅助数字线划图的生产[6],减少野外调绘的工作量。

图6 数字线划图
3 项目精度验证分析
空三区域网平差精度评定要求和结果如图7 所示,数字线划图的精度评定要求和结果如图8 所示。对质量检核点平面点位置和高程误差绘制误差分布如图9所示。

图7 空三区域网平差精度评定要求和结果

图8 数字线划图精度评定要求和结果
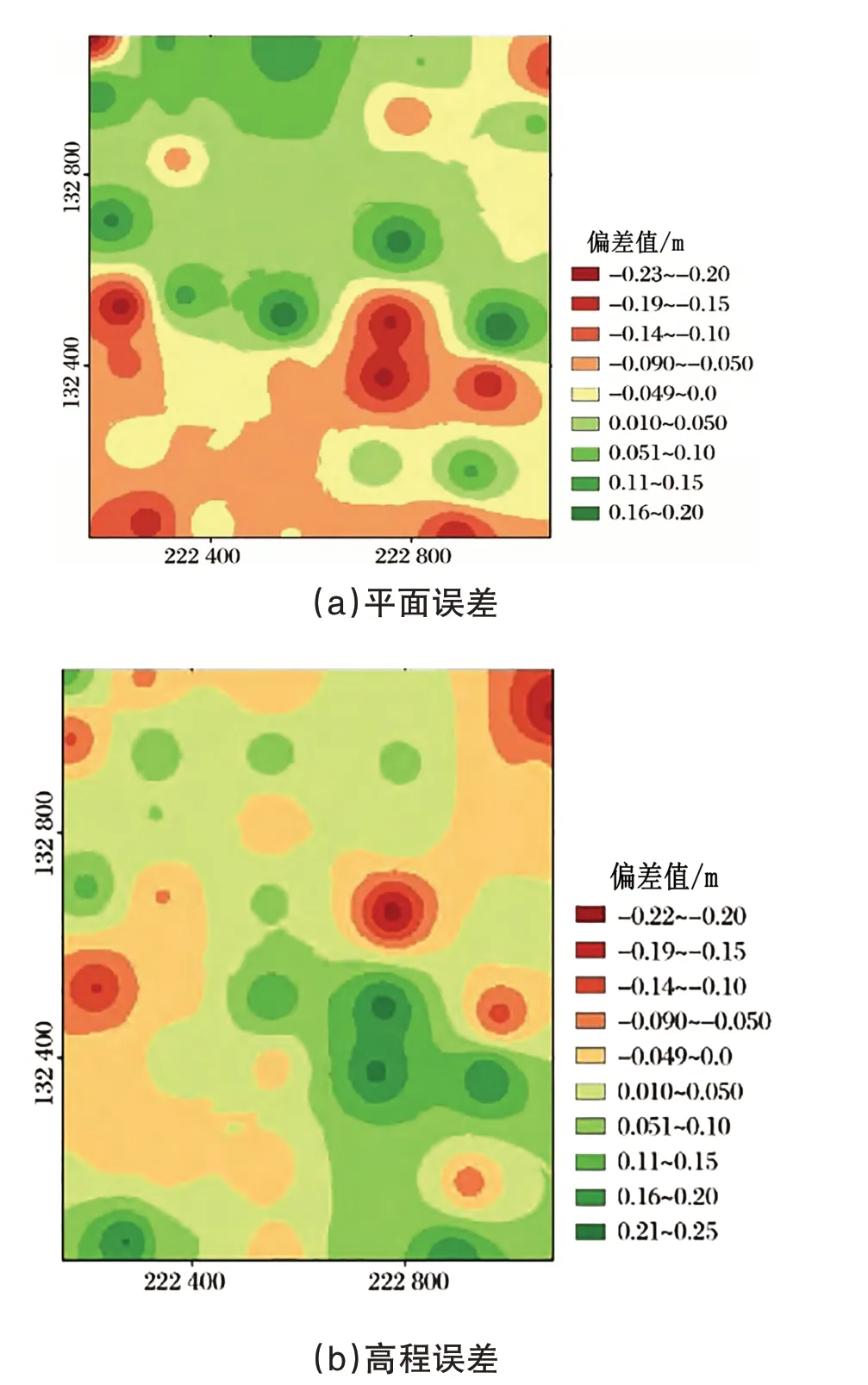
图9 质量检核点误差分布
4 结语
本文从应用实践出发,基于消费级四旋翼无人机进行1∶500 大比例尺测图任务,制订项目实施方案,进行精度分析,成果满足大比例尺地形图测绘的精度要求,可提供快速完成测绘任务的解决方案,具有较低的劳动强度和较小的经费开支,该方案是一种行之有效具有实际应用价值。
猜你喜欢
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
电子制作(2018年11期)2018-08-04
北京航空航天大学学报(2017年4期)2017-11-23
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
中国工程咨询(2017年12期)2017-01-31
测绘科学与工程(2016年5期)2016-04-17
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
