
电力隧道监测及巡检监控技术应用
2023-09-15 01:33王志成王胜辉
河南科技 2023年15期
王志成 王胜辉 刘 畅 张 俊 王 尧
(1.许继电气股份有限公司,河南 许昌 461000;2.许昌职业技术学院,河南 许昌 461000)
0 引言
高压电力电缆敷设在地下通道(管廊或隧道)中,恶劣的运行环境给人工巡检带来巨大困难,依靠人工运维不但工作量大、效率低,且危险度高。尤其是电缆设备故障或通道环境异常时,在现场工作的运检人员可能会有生命危险。目前,运维人员数量无法满足电力电缆及隧道快速增加的需要,导致电力隧道运检工作面临巨大压力,电力设备安全运行存在隐患和风险。基于电力电缆及通道运行维护的特殊要求,在线监测和移动巡检代替人工巡检,成为重要状态的感知技术手段,可完成对电缆隧道内电力电缆及附属设备的巡检,并实现对电力隧道设备状态的连续和动态采集。通过把采集到的现场视频、图像、空气中有害气体的含量等数据发回监控中心,可及时发现电力电缆发热、外观缺陷等设备异常现象,也可执行应急对讲指挥等相关处置措施,起到很好的防灾减灾效果。在将巡检人员从危险繁杂的工作中解放出来的同时,还能提升运维效率和保障电网可靠运行,实现电力隧道运维的状态感知自动化、通道环境可视化、运维管理精益化、分析决策智能化等功能[1]。
1 电力隧道巡检监控架构设计
电力隧道监控是在电力通用架构第Ⅲ区部署的,集成了环境、照明、风机、水泵、消防、视频监控、变配电、门禁和移动巡检等子系统,完成数据统一接入、存储、展示,并实现辅助设施远程控制、联动控制等高级功能。按集中又独立的大型分布式系统进行组建,电缆隧道综合监控由各项专业监测子系统和监控主站等组成,所有监测数据都集中在监控站上分析、控制、显示和存储。
建立统一的数据库对管廊隧道中监测装置所采集到的状态监测数据进行全局监视,并进行操作控制,可接入移动巡检、光纤测温装置、环境监测装置、环流监测装置、安防监测装置的数据,同时装置信息可在Web客户端进行浏览,并对各监测装置进行智能化控制。该系统设计遵循分层、分布式思想,采用标准化、网络化、功能分布的体系结构,在网络结构、硬件和软件配置上遵循开放性原则,达到系统的可扩充性、可维护性。在网络配置形式上,采用成熟、可靠、实用性强的开放式以太网,按照单网配置。网络拓扑结构可设计为总线型、星型或环型,传输介质可采用“双绞线+无线AP”结合方式,其主要对电缆本体和隧道配套部分两大部分进行监测,由物理架构和软件架构组成。电力电缆隧道监控架构如图1所示。
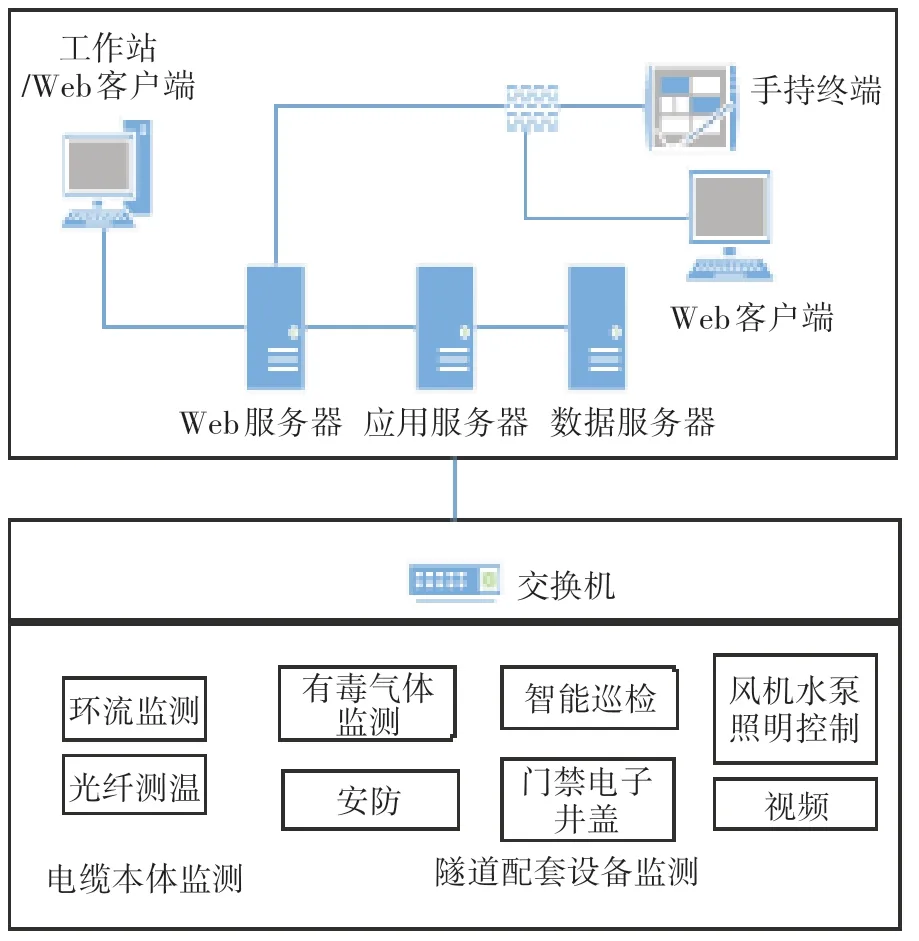
图1 电力电缆隧道监控架构
1.1 物理架构
电力隧道监控数据处理与展示模块由综合应用服务器、数据服务器、Web 服务器和展示主机组成,并配有显示器、键盘、鼠标等附件。监控系统综合数据中心基于数据服务器对数据进行综合采集、分析与展示,应用服务器对已采集到的现场数据进行智能分析和综合判断,并基于Web服务器进行前端数据处理与展示,通过常用浏览器(如Internet Explorer)进行展示浏览。上述数据传输要通过中心交换机或内部专用网络进行交换。
电缆本体监测包括电缆环流监测和光纤测温的数据通信交换。考虑到其数据容量较大,要通过专用网络进行数据收集,然后通过中心交换机上传到后台监控服务器。
隧道配套部分监测,隧道内各监测点要布控无线AP 和通信管理机,用于收集隧道内的安防、消防、视频等数据,并通过以太网方式传输到中心交换机。
智能移动巡检先通过无线通信方式将视频、图片信息上传到就地中心交换机,再通过以太网方式把图像信息统一进行数据存储,并对相关信息进行分析。
1.2 软件架构
相关软件开发是基于B/S 架构来实现的,开发环境采用开源方式来实现各业务模块的相关功能。通过Web网页方式来实现人机交互,采用视频流接口来实现监控与监测摄像头、移动巡检的交互。对各个业务单元的监测设备通过转换通信规约或直接接入方式来实现接口通信。主站与监测装置通信主要采用IEC 61850和IEC 104方式上送。
2 功能简介
电缆隧道监控包括电缆本体信息在线监测部分、隧道环境监控配套部分,这两部分包括移动巡检视频、环境温湿度、有毒有害气体、门禁、排水、电子井盖、风机、照明、消防[2-3]等子系统。这些信息将被收集成综合分析“大数据”,然后对这些数据进行存储、筛查、检索、应用、呈现、分析,从而实现对这些数据的综合利用,完成设备间的智能联动,实现电缆本体及隧道环境相关监测数据的接入、数据分析、数据展示和设备控制。
2.1 全局管理
全局管理主要查看管廊隧道在地图的分布情况,展示管廊中设备告警信息,以GIS 地图方式来显示管廊分布、对隧道和回路进行数量统计和查看隧道设备的实时告警信息。
2.2 电缆本体监测
2.2.1 环流监测。该部分主要有四大功能,分别为实时数据、实时曲线、日统计曲线、历史数据查询。实时数据功能主要用于展示接地箱A 相环流、B相环流、C相环流、Z相环流的信息,根据数据来判断出数据目前状态;实时曲线功能主要用于展示监测数据的实时曲线走势;日统计曲线功能可根据不同天的数据选择来展示曲线走势;历史数据查询功能可进行历史数据的查询。
2.2.2 光纤测温。监测线路上各接头的实时温度数据,展示每条线路中的分区数和电缆接头数量。监测线路区间中ABC 三相某个距离区域点电缆的表面温度和导体温度,并根据此区域的数据报警阈值对此区域的最高温度、最低温度、平均温度、温升尖峰、温差报警的数据进行对比[4]。另外,对电缆的表面温度、导体温度的实时数据曲线进行展示。
2.3 环境监测综合展示
在监测管廊线路中,隧道分区中气体传感器、温湿度、水位数据的状态信息。环境监测分三个功能,分别为区域环境示意图、实时曲线、历史曲线。 在区域环境示意图区,可实时监测该分区有害气体含量、温湿度及风机照明等设备的状态,并对风机等设备进行控制操作;实时曲线区是对有害气体、温湿度数据的实时走势的展示;历史曲线区是对有害气体、温湿度历史走势的展示。
2.4 环境监测智能控制
环境监测智能控制包括实时显示风机、照明、水泵的当前状态,可通过控制按钮对相关设备一键开启/关闭。
2.5 安防监测
该功能包括显示管廊的门禁、井盖位置信息及红外对射报警、入侵报警状态信息,控制门禁、井盖的开启关闭状态;监视视频场所内的视频信息,实时上传安防监测相关的报警信息。
2.6 视频监控
显示对应各隧道中不同分区的视频展示,可对各摄像头进行控制,并能进行视频回放。云台控制包括上、下、左、右、旋转、停止等功能,视频监视包括回放录像和手动抓取视频图像功能。
2.7 移动巡检
移动巡检主要为巡检机器人的数据接入、数据分析、数据展示和机器人控制。主要展示实时数据和视频、机器人控制、实时告警等功能。
实时数据包括机器人的信息列表、机器人状态信息、环境状态信息,实时上送机器人的当前位置、机器人速度、电池电量、障碍物、驱动器状态、低电量报警等状态信息,监测管廊环境中的CPU 温度、氧气浓度信息,并在机器人监控界面实时显示。实时视频包括高清和红外摄像头,可显示高清摄像头的实时视频信息。
机器人控制主要包括机器人云台远程控制、视频控制和机器人本体远程控制。机器人本体控制包括机器人本体的前进、后退、持续前进、持续后退、停止、去绝对位置、去相对位置、正向回零、反向回零、取消回零等,可设置机器人的运行速度和位移信息。速度设置为0.01~1 m/s,即可输入0.01~1 的任意数[5]。位移设置不做特殊要求,位移单位默认为m,位移设置区间为-1 500~1 500 m。机器人云台视频的3D启停、放大、缩小、拍照、录像、停止录像等控制功能。机器人云台远程控制包括遥控实现遥控云台的左上45°、上旋、右上45°、左旋、自动(360°旋转)、右旋、左下45°、下旋、右下45°等功能。
实时告警展示的内容包括告警详情栏实时显示的机器人状态。告警信息包括障碍物告警、低电量告警等信息。
3 系统关键点
一是监控需要具备完善和灵活的巡检策略、通信组网技术、定位与避障技术、视频图像处理技术;二是监控具备立体视觉的动态处理能力,能对连续图像视频和图像快速分析和定位;三是监控系统具备与巡检机器人进行位姿转换交互能力,根据实时视频图像分析结果自动与机器人进行联动。
4 结语
电力电缆入地是城市综合管廊监控最重要的一环。通过实时在线监测地下隧道运行环境和电力生产运行设备信息,不但能改变传统“计划检修+定期巡视”的方式,能很好地避免设备绝缘缺陷与潜在的故障,而且能及时反映电力电缆隧道的生产运行状态,实现安全、高效运维的目的。本研究通过对电力电缆管廊及隧道内各项在线监测子系统及故障监测提出监控解决方案,促进电力地下通道的建设,为电力地下通道的集约化管理提供有力支持,并为电力输送设备及生产环境全寿命周期运行管理体系[6]提供技术保障。
猜你喜欢
电线电缆(2021年3期)2021-07-21
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
安全(2020年2期)2020-04-16
趣味(数学)(2019年12期)2019-04-13
江西建材(2018年2期)2018-04-14
现代传输(2016年4期)2016-12-01
中国科技信息(2016年6期)2016-08-31
电子制作(2016年21期)2016-05-17
中国工程咨询(2016年2期)2016-02-14
中国科技信息(2015年23期)2015-11-07
