
基于多旋翼无人机的多连杆仿生起落架设计与仿真
2023-09-14 11:09:38任佳王计真杨正权刘小川
航空科学技术 2023年6期
任佳 王计真 杨正权 刘小川
摘 要:传统的多旋翼无人机着陆架存在对著陆场地适应性差、智能化程度低的缺点,设计一种具备复杂地形自适应起降的着陆装置对多旋翼无人机的发展具有重要意义。本文设计了一种基于多连杆混联机构的仿生起落架,针对单腿的设计构型进行驱动力矩分析与机构优化,在此基础上完成结构设计,并以多旋翼无人机为对象,设计了一套四腿仿生起落架系统,针对四腿机构进行典型地形着陆仿真。结果表明,多连杆仿生起落架设计方法可应用于多旋翼无人机的起落架设计中,并实现多旋翼无人机在非结构地形的自适应着陆。
关键词:多旋翼无人机; 仿生起落架; 设计; 仿真
中图分类号:V285 文献标识码:A DOI:10.19452/j.issn1007-5453.2023.06.010
基金项目: 航空科学基金(2017ZA23001;20184123011)
近年来,由于需要执行的任务越来越复杂,多旋翼无人机的工作环境也越来越复杂,常需要在一些未知的环境起降,况且工作过程中存在很多不确定性因素,因此对其起降要求也越来越高[1-2]。现阶段多旋翼无人机均采用由金属或碳纤维管制成的固定式脚架作为起落架,由于其机动性和灵活性较差,导致多旋翼无人机起降时对地面的平整度和坡角要求较高,需要寻找合适的场所或建立着陆场地用于多旋翼无人机起降[3]。在遇到某些特殊地形(如乱石滩、坡度较大地带)时,多旋翼无人机可能无法正常起降,加之其不能收起,对多旋翼无人机的近地飞行也会造成一定影响,甚至会造成脚架或机体的损坏,影响飞行质量。
蝗虫、蜻蜓等自然界中的昆虫,均采用复眼观察、足部感知和腿部伸展协调配合的方式多点着地栖落,可在树梢、花草等任意地形上稳定停靠。近年来,足式机器人的腿部拓扑结构和驱动方式大都参照了动物腿部构造特点,由于在复杂环境下具有更高的灵活性与环境适应性,更容易实现复杂地形的稳定行走与爬行[4]。所以,考虑垂直起降飞行器的着陆特点和飞行昆虫栖落具有诸多相似性,依托足式机器人腿部设计技术,提出一种基于仿生腿结构的地形自适应起落装置设计方法。
近年来,国内外相关机构相继开展仿生起落架的研究工作,并取得了一定的研究成果。2015年,佐治亚技术学院在美国国防部预先研究计划局(DARPA)专项经费支持下,率先设计了四足仿生腿起落架“robotic landing gear”,可在飞行时折叠于机腹、着陆时伸展支撑地面,配备足底压力感知设备,保证地形自适应性和机身平衡调节能力[5-6]。此外,苏黎世应用科技大学采用电动丝杠驱动设计了四自由度仿生腿[7],英国爱丁堡龙比亚大学设计了足端带有直杆的双腿结构起落架[8],俄罗斯索尔科沃科技学院设计了足端安装惯性单元的四腿式八自由度起落架[9],南京航空航天大学设计了一种带有三个液压伸缩杆的起落架结构[10],合肥工业大学采用单自由度四杆机构也设计了一种针对小型无人直升机的仿生起落架[11],中国飞机强度研究所针对无人直升机平台开展仿生腿式起落架设计并完成了针对不同重量(质量)级的垂直起降飞行器的设计可行性论证[12]。
本文基于多连杆混联机构提出多旋翼无人机的仿生腿式起落架设计方法,并基于某型多旋翼无人机验证平台完成仿生腿起落架的仿真,证明设计方法的有效性。
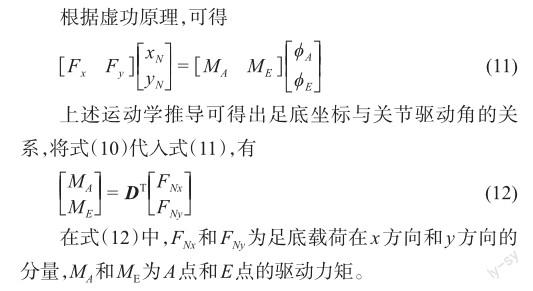
1 单腿机构设计
多旋翼无人机的仿生起落架不同于传统的固定式脚架,融合了仿生设计理念和自适应着陆控制,有多条腿对称分布于多旋翼无人机的机身下方,实现多旋翼无人机的着陆支撑和地形自适应。
1.1 单腿机构运动学与动力学建模
仿生腿式起落架采用多条相同设计的腿部结构,这里以单腿结构为例,给出腿部结构的设计方法。对于较成熟的腿足式爬行机器人腿部结构的设计,采用串联式和并联式,这两种构型均不适用于起落架设计。考虑仿生起落架的承载能力和收放折叠需求,单腿采用多连杆混联机构的构型,如图1所示。
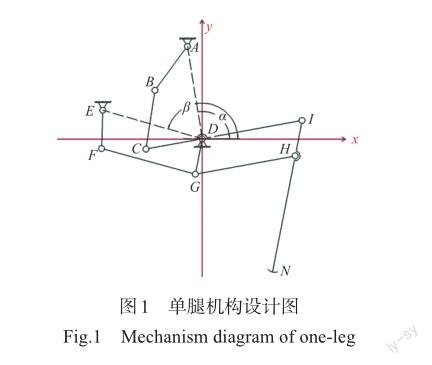
单腿作为多腿起落架的一部分,以满足着陆地形适应性为目的,设计时尽可能减轻自重,所以不考虑腿部旋转自由度,单腿为两自由度结构。单腿结构由两个四连杆机构ABCD、EFGD和一个平行四边形机构DGHI组成,两个驱动关节安装于A点和E点。


仿生腿式地形自适应起落架的腿部具有轻量化的特点,且大部分质量集中于垂直起降飞行器的机体上,计算驱动力矩时忽略腿部机构的重力影响。
基于虚功理论,采用解析方法建立电机输出力矩与足端支反力的定量函数关系,可为电机、减速机选型及后续控制策略提供依据。
1.2 结构驱动力矩分析
基于建立的理论分析方法,针对图1的机构设计,进行单腿结构设计与承载能力分析。这里,以各杆件长度、机架角α和β为优化变量,以足底运动范围满足设计使用场景的设计着陆地形要求为约束条件,以驱动杆的输出驱动力矩最小为优化目标,并适当考虑安装干涉,单腿机构各优化变量见表1。

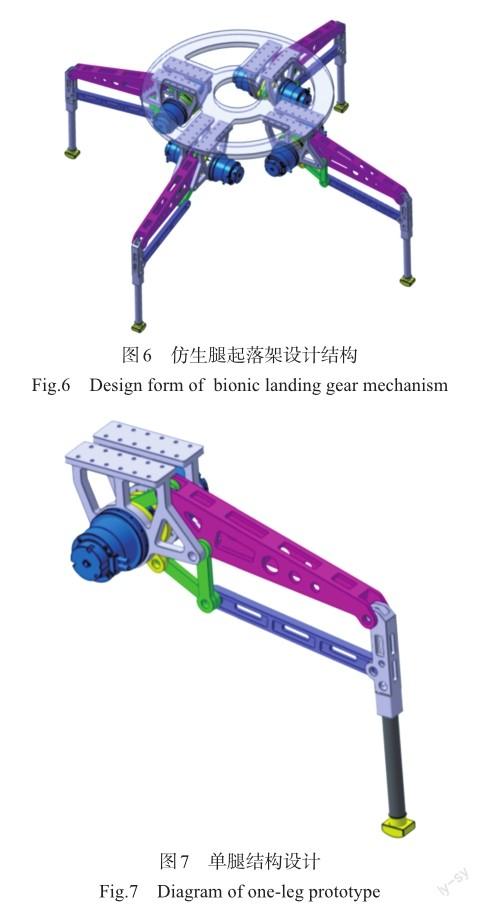
基于此设计结果,遍历驱动杆AB杆和EF杆的可行运动范围,可得单腿足端的运动空间,如图2所示。通过单腿机构运动仿真可以看出,驱动杆AB和EF在整个360°周期内运动,足底的运动空间在三、四象限,单腿机构可完全折叠收起。固定EF杆,在[-180°,180°]的周期内旋转AB杆,可以得出驱动杆AB和EF的输出扭矩如图3所示;固定AB杆,在[-180°,180°]的周期内旋转EF杆,可以得出驱动杆AB和EF的输出扭矩如图4所示。通过力矩输出曲线可以看出,在运动过程中AB杆和EF杆的驱动力矩是解耦的, EF杆的驱动力矩与AB杆的驱动角无关;同时AB杆的驱动力矩也与EF杆的驱动角无关。
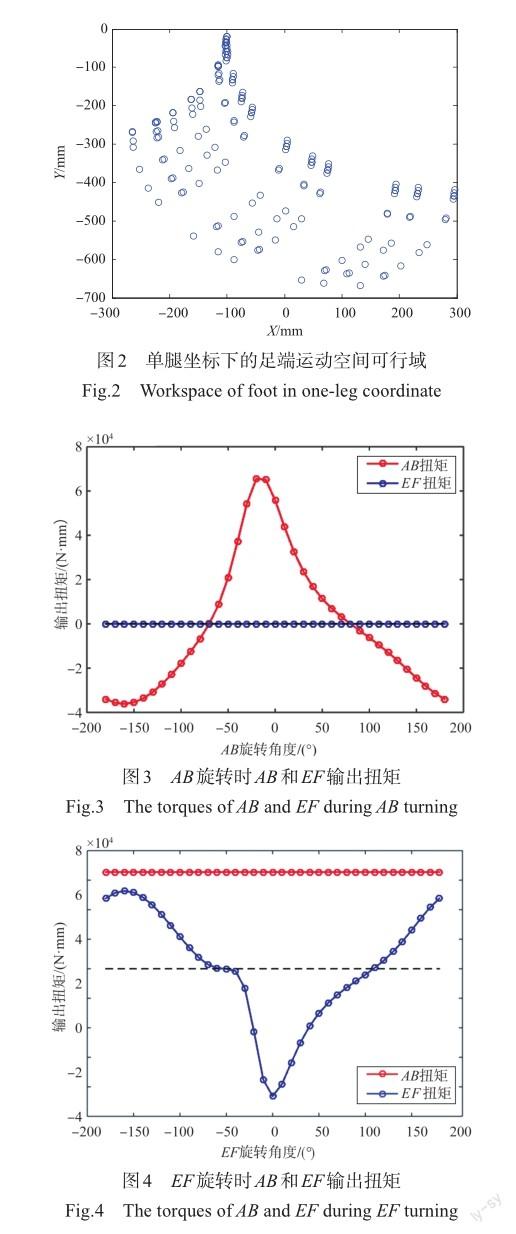
驱动部件选型时,尽可能考虑足端运动空间内承受最大的负载,所以着陆过程中使用死点两端的慢回区间,以降低对驱动力矩的要求。所需最大输出扭矩分别为38N·m和63N·m,即可满足承载要求。
2 基于验证平台的仿生起落架设计
为实现仿生起落架系统设计,基于已研制的某型多旋翼无人机平台实现仿生起落架系统设计,实现无人直升机自适应着陆的功能。
2.1 验证平台及仿生起落架设计
为实现仿生起落架设计,选择的某型多旋翼无人机平台如图5所示。无人机的性能参数见表2。

采用4条单腿构成仿生腿起落架系统,4条腿采用对称十字分布且构型相同,安装于转接盘。为了便于仿生腿式起落架與原着陆架之间的转换与拆卸,保留原着陆架安装接口,转接盘与多旋翼无人机采用原安装接口连接,并加装橡胶以达到隔振的目的。系统设计如图6所示,单腿设计如图7所示。仿生起落架系统设计总重35kg,考虑20%的安全余量,有效承载100kg,单腿输出力矩为65N·m。
仿生起落架系统包括辨识系统(包括惯性测量单元(IMU)、全球定位系统(GPS)、激光雷达和视觉相机)、驱动系统(包括电机、减速机、制动器和驱动器)、机械系统(仿生腿、机械传动杆等)、控制系统(飞控系统、仿生腿控制系统)4个部分。
2.2 起降原理与控制系统设计
多旋翼无人机在着陆过程中,可分为三个阶段,分别是高空高速下降阶段、低空低速下降阶段、悬停及触地调整阶段,如图8所示。在高空高速下降阶段,选定目标降落区域并得到关节空间规划,使飞行器飞往目标区域垂直上空进行垂直降落,采取较快的下降速度,在距离目标点垂直高度小于20m时结束此阶段。在低空低速下降阶段,飞行器以较低速度垂直下降,足端触地前完成关节空间的预定轨迹跟踪,足端触地时结束此阶段。在悬停及触地调整阶段,飞行器悬停并开启腿部阻抗控制以消除误差及干扰影响,使全部足端以柔顺的方式逐渐触地,足端全部触地且接触力接近期望力后,关闭飞行器发动机,利用阻抗控制保持整体稳定,至此完成降落。
通过图8所示的着陆工作流程实现基于多旋翼无人机的仿生起落架控制。其控制原理框图如图9所示。通过图9的控制原理框图,对具体地形环境感知和建模,实现期望足力的跟踪,完成关节姿态调整,将力的偏差转化为位置的偏差,实现期望力的跟踪。
控制过程中,关节驱动单元作为执行器,在驱动器的驱动下,通过控制器中的运动控制算法实现单腿系统的驱动控制与运动。运动过程中,控制器通过驱动器控制电机输出转速和力矩,通过减速机增大力矩、减小转速;当垂直起降飞行器稳定着陆后,通过控制抱闸实现稳定停靠;编码器用来返回电机的真实位置。驱动与控制系统组成如图10所示。
3 典型地形着陆仿真
基于多旋翼无人机平台开展四腿机构着陆仿真,基于 Matlab和ADAMS软件对仿生腿式起落架设计构型的地形适应性和着陆控制过程进行仿真,以验证设计方法的有效性。
仿真过程中,通过Matlab编程建立四腿机构的模型,仿真机构在不同地形上的姿态适应性,验证地形适应能力,计算驱动力矩。在保证地形适应性的前提下,通过Matlab/ Similink和ADAMS联合仿真搭建下降控制、角度控制、ADAMS联合仿真和足力分配4个模块,创建不同地形,完成虚拟样机着陆仿真。

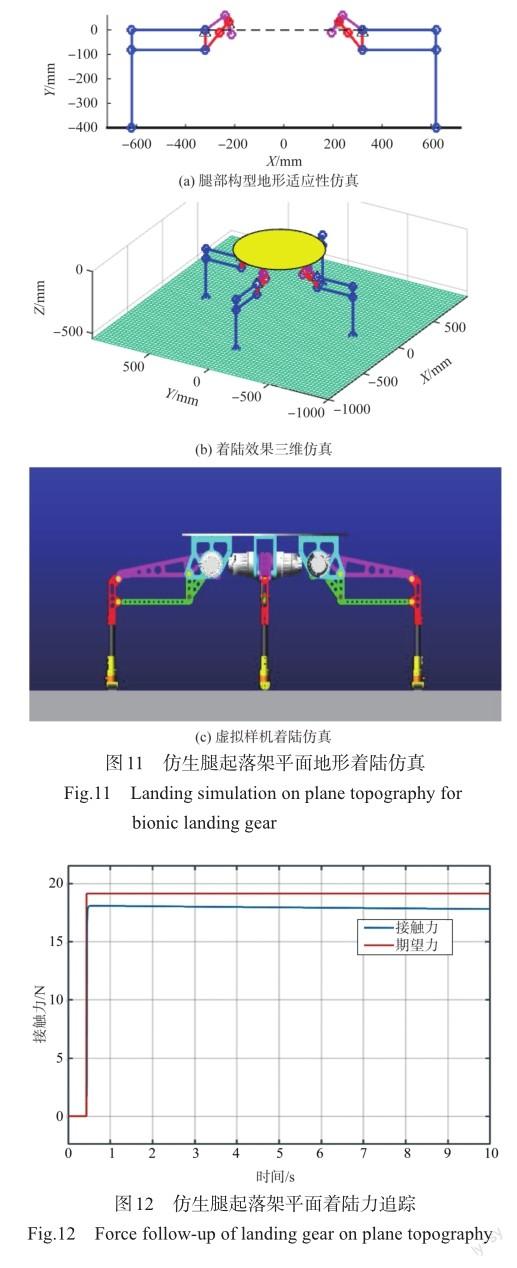
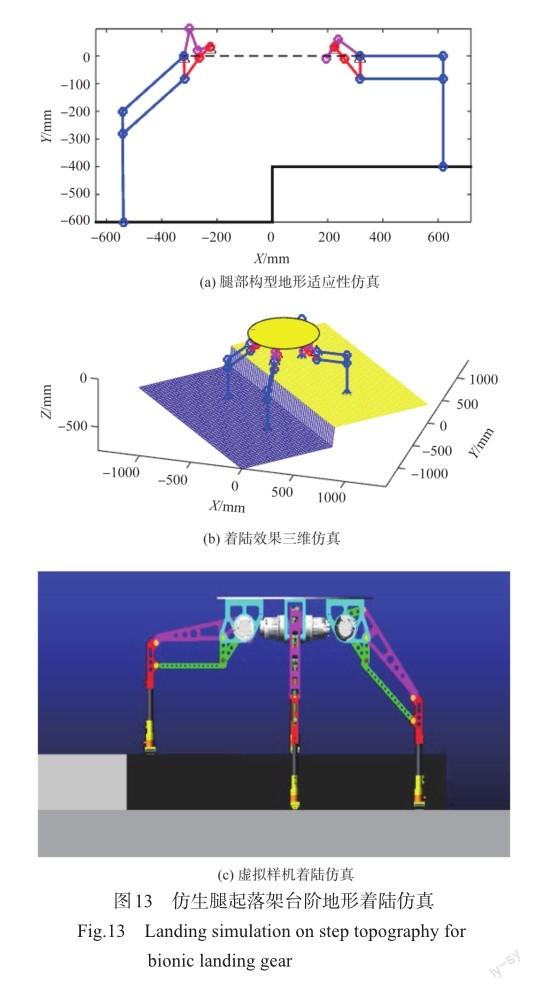
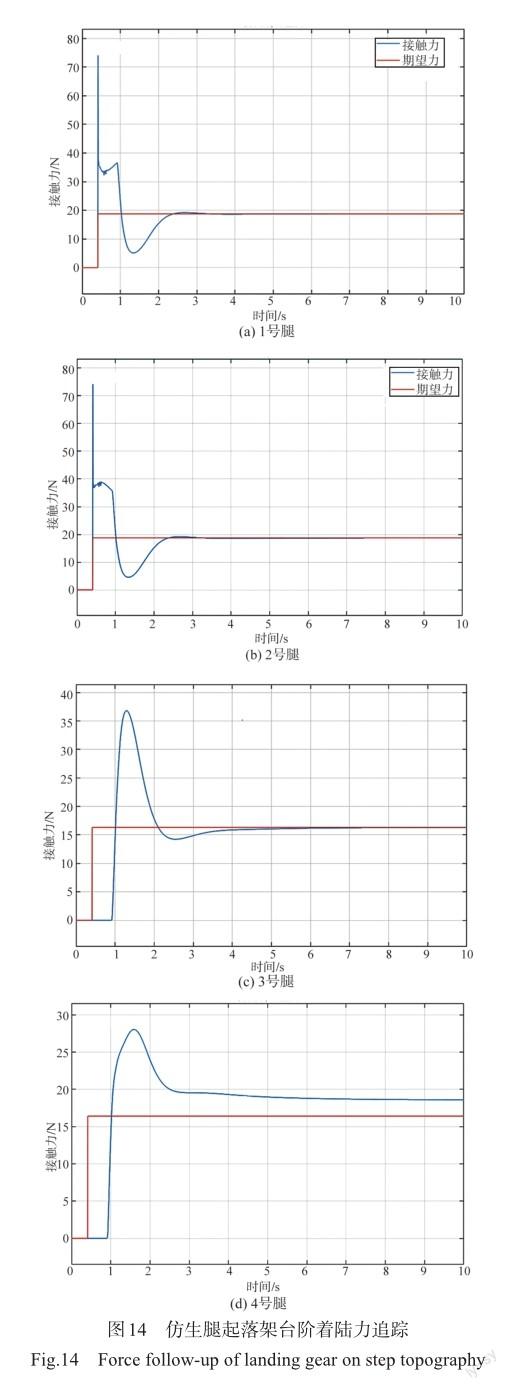
在平面地形条件下,仿生起落架的着陆仿真结果如图11所示,图中的坐标为起落架运动的方向。此时,由于对称结构的平面着陆,4条腿的驱动杆输出力矩相同,足力追踪情况相同。在维持稳定时,AB杆的驱动力矩为11N·m,EF杆的驱动力矩几乎为0,足力追踪情况如图12所示。在200mm高差的台阶地形条件下,仿生起落架的着陆仿真结果如图13所示,图中的坐标为起落架运动的方向。此时,将1号腿和2号腿视为一侧,3号腿和4号腿视为一侧,着陆时同侧腿的足端高度相同。在维持稳定时,台阶上方一侧腿的AB杆的驱动力矩为11.01N·m,EF杆的驱动力矩几乎为0,台阶下方一侧腿的AB杆的驱动力矩为58.88N·m,EF杆的驱动力矩为-0.21N·m。各条腿的足端力追踪情况如图14所示。
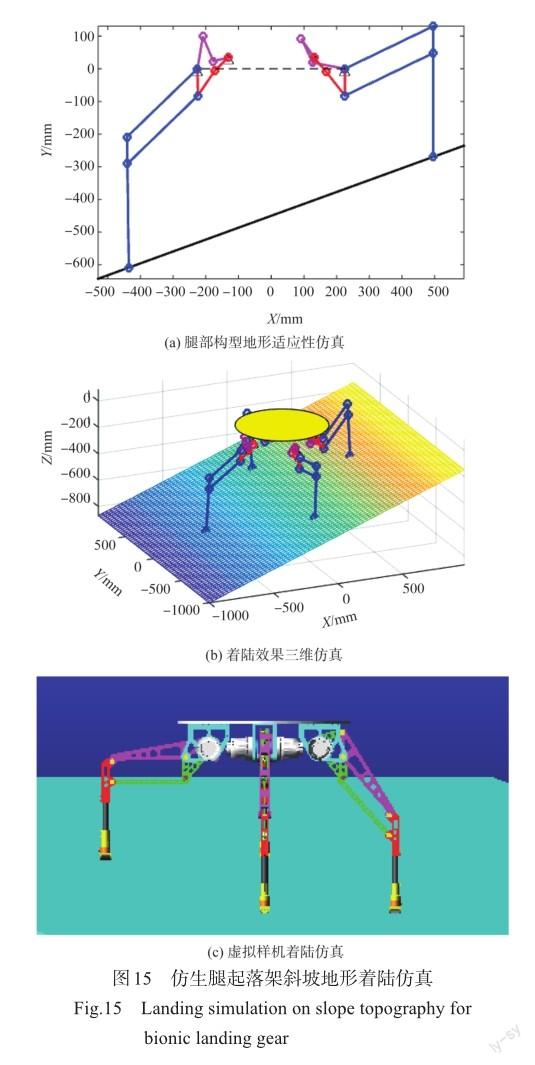
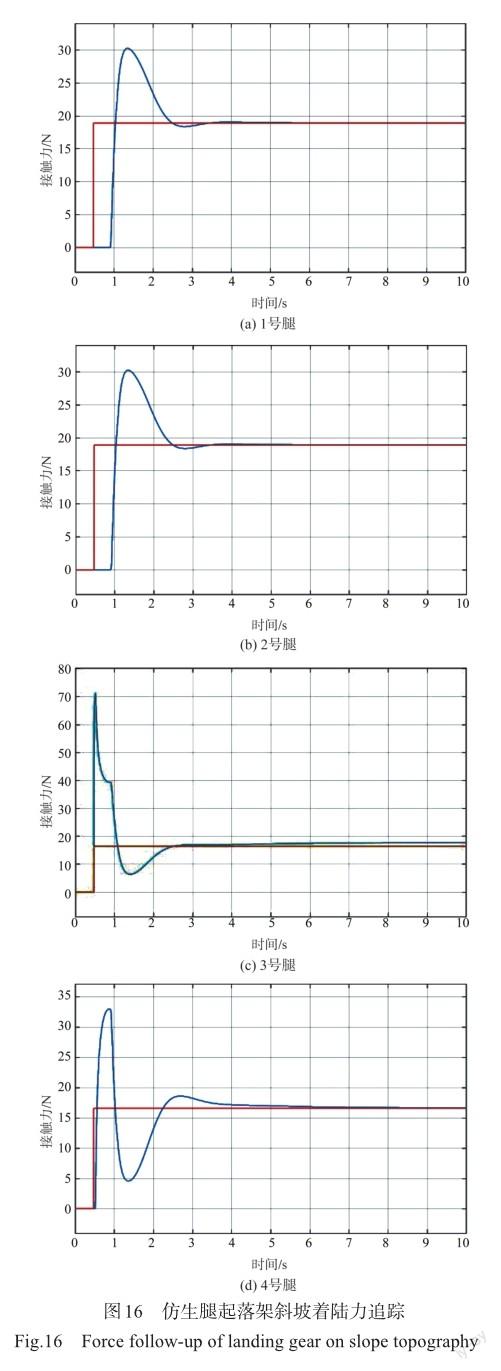
在20°斜坡地形条件下,仿生起落架的着陆仿真结果如图15所示,图中的坐标为起落架运动的方向。此时,将1号腿和2号腿视为一侧,3号腿和4号腿视为一侧。在维持稳定时,斜坡上方一侧腿的AB杆的驱动力矩为5.09N·m,EF杆的驱动力矩几乎为0,斜坡下方一侧腿的AB杆的驱动力矩为-55.73N·m,EF杆的驱动力矩为0.41N·m。各条腿的足端力追踪情况如图16所示。
通过仿真可以看出,各条腿的足力分配具有很好的跟踪效果,整个机体可以在着陆过程中维持整体平衡,达到了预期的效果。

4 结论
本文提出了一种多旋翼无人机的多连杆仿生起落架的设计方法,在给出单腿机构设计方法、基于验证平台的系统设计方法基础上,通过Matlab/Similink和ADAMS联合仿真给出典型的不同地形条件下的着陆情况,可得到如下结论:
(1)基于多连杆混联机构的仿生起落架可以用于多旋翼无人机获得更好的着陆地形适应性,实现平地、斜坡、台阶等自适应着陆,有效改善着陆情况。
(2)采用多连杆混联机构的设计构型应用于仿生起落架设计时,通过正运动学与逆运动学求解的方式来完成自适应着陆控制。
(3)本文提出的仿生起落架设计方法为一种通用方法,可用于多旋翼无人机、无人直升机等垂直起降飞行器的起落架设计,但由于结构复杂,会影响其承载能力。
参考文献
[1]Spanoudakis P, Tsourveloudis N C, Valavanis K P. Design specifications for an unmanned VTOL[C]//Proceedings of the 2004 IEEE International Conference on Robotics and Automation, 2004: 3616-3621.
[2]Do K D, Jiang Z P, Pan J. Global output feedback tracking control of a VTOL aircraft[C]//Proceedings of the 42th IEEE Conference on Decision and Control, 2003: 4914-4919.
[3]张月义. 无人机结构与原理[M]. 西安:西北工业大学出版社,2020. Zhang Yueyi. UAV structure and principle[M]. Xi’an:Northwest‐ern Polytechnical University Press, 2020. (in Chinese)
[4]胡重阳,梅涛,刘彦伟. 仿生六足机器人机构设计及控制方法研究[J].机械科学与技术,2014,11(33):1621-1627. Hu Chongyang, Mei Tao, Liu Yanwei. Research of control method and mechanism design of bio-inspired hexapod robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2014,11(33):1621- 1627. (in Chinese)
[5]Kiefer J, Ward M, Costello M. Rotorcraft hard landing mitigation using robotic landing gear[J]. Journal of Dynamic Systems, Measurement, and Control, 2016, 138(3):216-224.
[6]Manivannan V, Langley J P, Costello M, et al. Rotorcraft slope landings with articulated landing gear[C].AIAA Atmospheric Flight Mechanics(AFM) Conference,2013: 5160.
[7]Stolz B, Br?dermann T, Castiello E, et al. An adaptive landing gear for extending the operational range of helicopters[C].2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),2018: 1757-1763.
[8]Boix D M, Goh K, Mcwhinnie J. Helicopter lands on uneven terrain by means of articulated robotic legs-modelling, simula‐tion and control approach[C].2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2018: 1282-1287.
[9]Sarkisov Y S, Yashin G A, Tsykunov E V, et al. Dronegear: A novel robotic landing gear with embedded optical torque sensors for safe multicopter landing on an uneven surface[J]. IEEE Robotics and Automation Letters, 2018, 3(3): 1912-1917.
[10]王曉晖,南英.基于仿生的适于特殊地形的直升机起落架设计[J].飞机设计,2014,34(4):46-48. Wang Xiaohui, Nan Ying. Helicopter landing gear design for special terrain based on bionics[J]. Aircraft Design, 2014,34(4): 46-48. (in Chinese)
[11]桑哲,江斌,楊记周,等. 小型无人直升机仿生起落架设计[J].现代制造技术与装备,2016(2):79-81. Sang Zhe, Jiang Bin, Yang Jizhou, et al. Design of bionic landing gear for small unmanned helicopter[J]. Modern Manufacturing Technology and Equipment, 2016(2):79-81. (in Chinese)
[12]任佳,王计真,刘小川.复杂地形条件下的着陆设计与控制仿真[J]. 航空科学技术,2020,31(9): 84-90. Ren Jia, Wang Jizhen, Liu Xiaochuan. Landing design and control simulation in complex terrain conditions[J]. Aeronautical Science & Technology, 2020, 31 (9): 84-90.(in Chinese)
Design and Simulation of Multi-link Bionic Landing Gear Used on UAVs
Ren Jia, Wang Jizhen, Yang Zhengquan, Liu Xiaochuan
Aviation Key Laboratory of Science and Technology on Structures Impact Dynamics, Aircraft Strength Research Institute of China, Xi’an 710065, China
Abstract: Traditional landing gear of the UAVs has the shortages of poor terrain adaptability and low level of intelligence. It is important to design a kind of landing gear with function of complex terrain adaptive takeoff and landing for the multi-rotor UAV development. A kind of landing gear is designed based on multi-link hybrid bionic leg structure. The design configuration of the bionic leg is given based on the drive torque analysis and optimization while finishing structure design. Based on the multi-rotor UAV, a four-leg landing gear system is designed, and simulation of landing process is done aiming at typical terrain. The research results show that the design method of terrain adaptive landing gear with bionic leg structure can be applied to the design of multi-rotor UAV landing gear, and it has the ability of adaptive landing on unstructured terrain.
Key Words: multi-rotor UAV; bionic landing gear; design; simulation
猜你喜欢
现代装饰(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
艺术启蒙(2018年7期)2018-08-23 09:14:18
海峡姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技资讯(2016年18期)2016-11-15 20:09:22
数字技术与应用(2016年9期)2016-11-09 23:25:33
数字技术与应用(2016年9期)2016-11-09 22:09:07
科技视界(2016年18期)2016-11-03 21:44:44
科技视界(2016年18期)2016-11-03 20:31:49
