基于慧鱼技术的海洋垃圾收集装置研究
2023-09-14 06:13万宏钢
南方农机 2023年19期
万宏钢
(江西机电职业技术学院,江西 南昌 330000)
随着海洋经济的快速发展,海洋垃圾越来越多,对沿海城市以及海洋生物造成了严重影响[1-3]。目前主要靠人工对海面上的大量垃圾进行清理和收集,不仅费时费力,而且工作效率一般,这一现状触发了人们对机械化水面清扫船的需求[4]。笔者研制的“海洋环境卫士”是一种清理和收集海面垃圾的新型工具船,如图1所示,可以实现自动化控制,完成垃圾的收集、筛选、粉碎和压缩打包等一系列无人化操作,不仅节省了人工成本,还大大提高了工作效率。目前高性能的海面清扫船仅集中在船舶建造工业发达的少数国家,但需求量却是全球性的,因此该产品具有广阔的市场前景[5-8]。

图1 海洋环境卫士
1 作品构思
“海洋环境卫士”具有操作自动化、功能模块化、智能化等特性,包括6大系统。
1)拦截系统:包括传动和拦截两部分。利用螺旋传动将挡板推出,随后通过齿轮与连杆相结合的方式驱动挡板展开,从而拦截垃圾。
2)传送系统:由伸缩履带装置和传送装置组成。履带和卷扬机通过伸缩装置伸入水面以下,卷起拦截网上的垃圾,随后由传送装置将垃圾传送至下一系统。
3)预处理系统:通过一系列预处理可以对垃圾进行分拣和粉碎,便于后续的打包处理。
4)打包回收系统:经过预处理的垃圾通过导槽掉落至压缩箱,随后电机启动运转,带动压缩机体的齿轮齿条往复运动,实现垃圾压缩打包处理,方便后续回收储存。
5)智能仓储系统:推出装置将压缩箱推出,再通过智能机械夹子将压缩箱进行堆放。实现这两个动作后推出装置复位,再由换箱装置进行换箱操作。
6)智能识别系统:利用In-Sight软件实现智能视觉系统,使其能够对箱体容量进行智能化识别。
2 各部分结构与工作原理
2.1 智能控制部分
智能控制部分由4块慧鱼编程接口板和计算机联合控制。当接通工作开关后,程序启动,各个部分无需单独操作,利用计数器与限位开关联合工作,实行精确控制,如图2所示。摄像头可以随时判断压缩机构是否正常运行。当正常运行时,摄像头捕捉画面正常,以此来监测压缩装置;当非正常运行时,摄像头捕捉画面异常,电脑以及船身控制器发出警报,并能精确定位故障部位。

图2 智能控制部分
2.2 拦截装置
挡板通过螺旋传动推出,随后通过齿轮与齿条进行前后运动从而带动连杆将挡板展开,如图3所示。

图3 拦截装置开启与关闭
2.3 伸缩装置
伸缩履带装置如图4所示,当需要收集垃圾时,通过TXT控制,启动电机带动丝杆旋转,将卷扬机及贮带仓伸长至水面并延伸至水下,进行垃圾处理的准备工作。
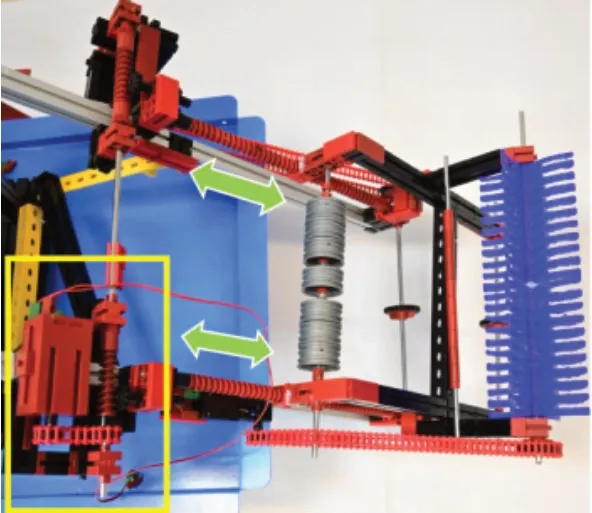
图4 伸缩履带装置
2.4 传送装置
当卷扬机到达指定收集位置后,启动电机带动卷扬机开始运动,将需要收集的垃圾通过卷扬机的旋转运输到履带前方后,履带启动,将收集到的垃圾向分拣装置运送。装置由链传动进行,使装置平均传动比准确,工作可靠,效率高。
2.5 分拣装置
装置通过预留间隙以及齿轮之间的啮合达到筛选和粉碎的目的,且两者之间完全由齿轮传动,保证了装置的准确性和可靠性。在垃圾运送的途中,分拣装置启动,通过电机进行震动,将收集到的垃圾按照体型分为小型及大中型垃圾,小型垃圾通过筛选滑至垃圾收集箱,大中型垃圾则前往粉碎装置。分拣装置具体结构如图5所示。

图5 分拣装置
2.6 粉碎装置
在分拣装置启动过程中,粉碎装置启动,如图6所示。大中型垃圾通过筛选装置进入粉碎机,粉碎机通过电机带动两组高速运转的齿轮对垃圾进行破碎,完成破碎的垃圾落入垃圾收集箱中。

图6 粉碎装置
2.7 隔挡装置
通过电机带动链传动,实现两端螺杆的同步上下运动,使隔挡门实现开启和关闭状态,进而更好地控制垃圾的进入量,从而使压缩装置更好地工作,隔挡装置如图7所示。
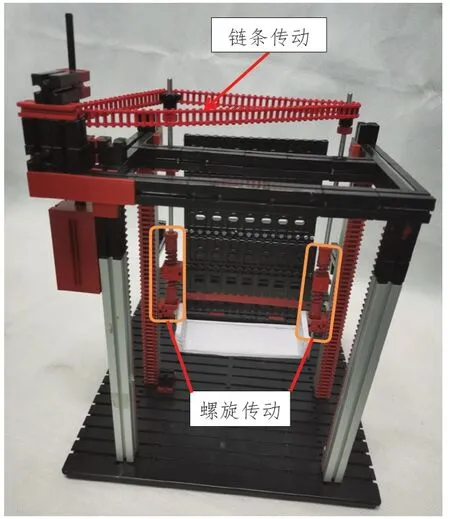
图7 隔挡装置
2.8 压缩装置
粉碎后的垃圾和小型垃圾落入垃圾收集箱后,压缩装置启动,如图8所示。通过电机运转,带动压缩机体的齿轮齿条传动进行往复运动,由自身重力对垃圾进行压缩打包。
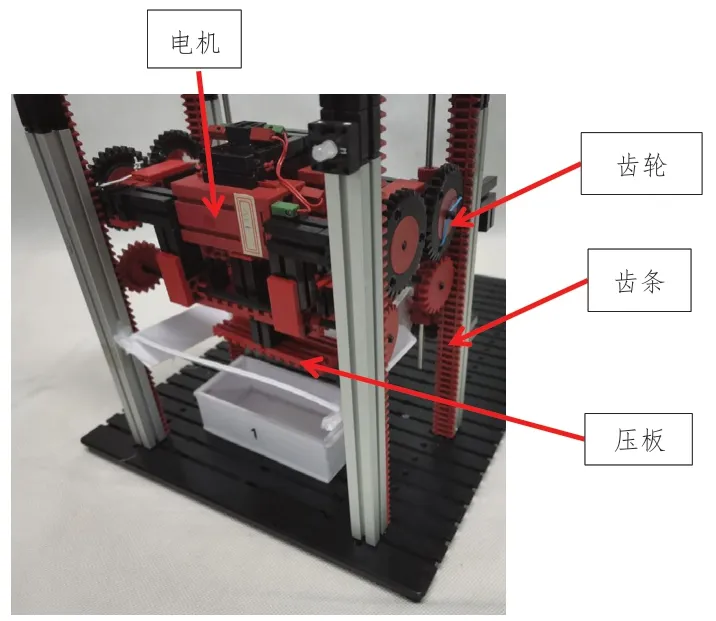
图8 压缩装置
2.9 推出装置
当垃圾压缩完成后,通过电机带动箱体下方的齿轮齿条传动,进行箱体的前后运动,达到将箱体推出的目的,以便切换箱体。推出装置及齿条导轨如图9所示。
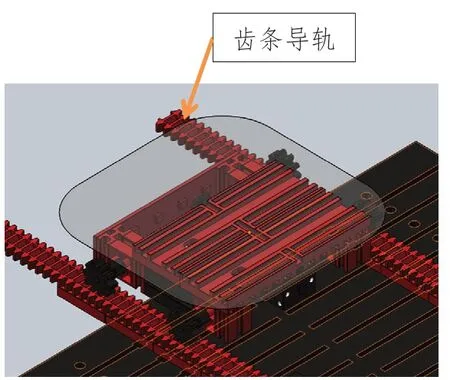
图9 推出装置
2.10 换箱装置
通过电机驱动螺杆前后运动,使新的箱体被推至压缩装置下,储存好的箱子通过重力下落,进行下一轮回。换箱装置具体结构如图10所示。

图10 换箱装置
2.11 智能仓储装置
上端具有导轨可供智能抓取装置在仓库内上下左右运动,从而能够实现自动化入库,智能堆叠。下方具有承重柱,具有承重量大、结构稳定的特点。智能仓储装置总体视图如图11所示。
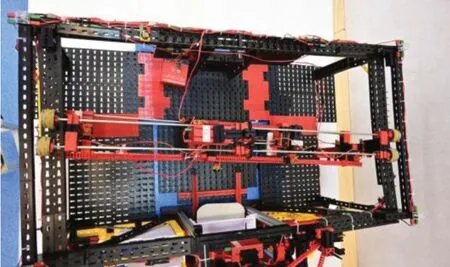
图11 智能仓储装置总体视图
2.12 智能抓取装置
当箱体推出时,智能抓取装置将通过导轨移动到箱体上方进行抓取,装置设有自动升降,可在仓库内全方位移动进行货物堆叠。智能抓取装置主体部分如图12所示,可实现以下操作。

图12 智能抓取装置主体部分
1)爬升:通过齿轮与齿条啮合进行爬升,传递动力大、寿命长,工作平稳,可靠性高。
2)左右:通过链条传动,实现左右精确运动。
3)前后:利用4个负重轮在导轨上进行前后运动,负重轮上有橡胶包裹,用于增加摩擦力。
4)夹抓:两条螺杆并排放置,二者之间通过齿轮传动达到开合的目的。
2.13 节能装置
通过太阳能和风能搭建风光互补供电系统,从而实现节能,具体如图13所示。
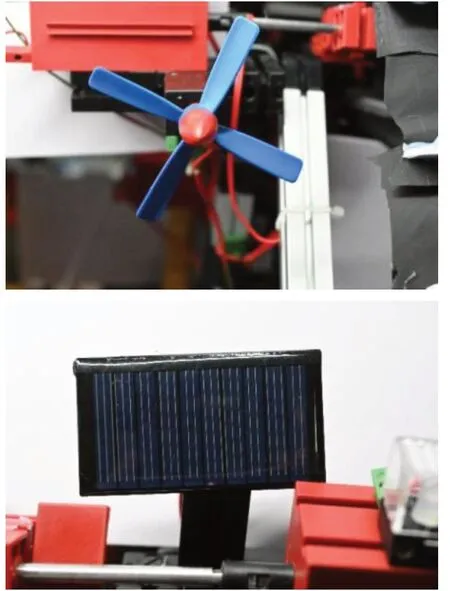
图13 节能装置
2.14 推进装置
推进装置利用3组相互啮合的齿轮,由编码电机带动齿轮运动,实现船体的前进与后退,具体如图14所示。
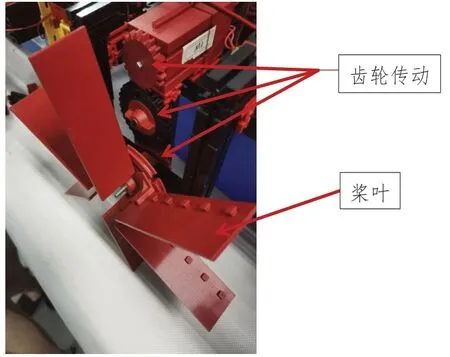
图14 推进装置
2.15 智能识别装置
利用In-Sight软件的智能视觉系统,使其能够对箱体容量进行智能化识别,智能识别装置如图15所示。

图15 智能识别装置
3 作品的科学性与先进性
本装置的智能控制系统由ROBO Pro控制软件、接口板和传感器组成,能够对伸缩装置的伸出与缩回等步骤进行控制[9-10],科学性和先进性在于:
1)对接口板进行了扩展操作,电机接口由原来的4个变成了8个,同时I/O口的数量也扩展为原来的两倍,保证作品所需的电源、输入信号、输出信号都可以连入控制器中,控制环卫车完成所有的动作。控制器对各电机、传感器的运行状态进行监控,进一步保证了“海洋环境卫士”运行的可靠性。
2)本装置利用限位开关检测机构运行的位置,控制机器的运行、停止或计数,把数字量的结果即0或1返回给控制器。相比其他类型的传感器采用延时的控制方式,本设计中的限位开关可以精确控制电机运行的时间,这大大提高了系统运行的可靠性和稳定性。
4 作品的创新点
1)智能仓储:智能机械平台能够实现在仓库内上下左右运动,从而能够实现自动化入库。
2)伸缩装置:能有效收集水面垃圾和漂浮垃圾,大大提高了工作效率。
3)换箱装置:通过电机驱动螺杆前后运动,进而使新的箱体被推送至压缩装置,存储好的箱子则通过重力下落进行下一道工序。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
物流技术与应用(2020年4期)2020-05-06
水运工程(2020年2期)2020-02-26
物流技术与应用(2019年6期)2019-07-16
中国自行车(2018年8期)2018-09-26
中国铸造装备与技术(2017年6期)2018-01-22
制造技术与机床(2017年3期)2017-06-23
工业设计(2016年4期)2016-05-04
水利科技与经济(2016年7期)2016-04-25
现代商贸工业(2016年35期)2016-04-09