基于无人驾驶方程式赛车的电池箱联合仿真实验设计
2023-09-13 13:20:08刘彦博申赞伟张震科彭奕超
实验室研究与探索 2023年6期
刘彦博, 申赞伟, 魏 峥, 方 子, 张震科, 彭奕超
(上海交通大学a.电子信息与电气工程学院;b.机械与动力工程学院,上海 200240)
0 引言
近年来,国家推动新能源汽车产业化发展与智能化转型,交通运输部、汽车工程学会推出的《智能网联汽车技术路线图2.0》为我国汽车产业规划出宏伟蓝图[1]。无人驾驶汽车电池的设计越发重要,同时也促进了产业发展与多元人才体系培养[2]。大学生无人驾驶方程式大赛要求参赛车队自主设计赛车电池箱作为动力来源。在设计过程中,需要考虑电池箱本身的性能与安全,并且还要将温度等参数引入电芯建模[3],同时需要对运行过程中的电池箱热力学模型进行分析[4]。作为赛道固定的方程式赛车,在赛道中的速度、加速度等指标是存在最优解并且可以预测的。本文根据赛道仿真情况设计电池箱来减少电源冗余,通过模型仿真过程中赛道环境的反馈进行性能优化。
1 总体模型构建思路
本文使用Simulink仿真平台对无人驾驶赛车进行建模,并结合车辆的运动学参数、电池箱的电气与热力学的参数以及状态之间的关系建立联合仿真[5]。
整车模型由电池提供能量,通过电动机输出驱动力矩,再经动力传动系统传递到车轮并作用于道路,实现对整车的驱动[6]。仿真过程中,通过电池箱温度和电池荷电状态(State of Charge,SoC)来评估电池箱在赛道中的性能。
2 车辆赛道仿真与动力学模型
2.1 基础的赛道仿真
本节使用Optimum Lap 软件,对车辆在方程式无人驾驶赛道中的运动过程进行仿真[7]。Optimum Lap用于建立赛道地和赛车动力模型,将赛道和车辆动力模型进行匹配,以模拟赛车在赛道上的工作状态。
2.2 车辆动力学模型搭建
在电池箱的设计过程中,在车辆运动力学方面,要考量速度和纵向、横向加速度以及车辆本身的质量、车轮转动惯量等参数。通过速度以及空气动力学参数,计算模拟电池箱内部的空气流动情况;结合电池箱的热力学模型,计算出在当前车速下电池箱的散热性能;结合电池箱的输出情况得到箱内温度,以此来模拟温度对于电芯放电的影响。利用在某一时刻下车辆的纵向加速度、速度、车辆质量的信息,并结合Emrax228 电动机的外特性获得电池箱的输出功率。
车辆在匀速行驶时遇到的空气阻力
式中:CD、Ar分别为车辆的风阻系数与迎风面积;ua为车速。车辆在加速行驶时遇到的阻力
式中,m为车的质量,由于赛车采用一级减速且齿轮质量很小,齿轮的转动惯量可以忽略不计,只考虑轮胎与车辆本身的惯量。
在车辆动力学模型的构建中,采用经典的车辆加速公式[8],车辆的合力
式中:Ff=fG为车辆阻力,G为车辆重量,f为滚阻系数;Fi为坡度阻力,鉴于赛场环境,此项为零。
电池箱所需要的输出功率
式中,ηt为传动系的传动效率。同时为反映电池箱的输出功率,将电动机的效率也合并其中,将相关参数带入,完成建模,可得
3 电池箱电气建模与仿真
本实验采用聚合物锂电池作为电芯,采用较为简单的RC模型作为电芯模型[9]。在整个实验过程中,引入温度变量对电池箱的数据进行仿真模拟[10]。实验中的锂电池内阻由两部分构成,分别是欧姆内阻和极化内阻[11]。在本仿真系统中,采用如图1 所示的RC模型作为电芯模型。
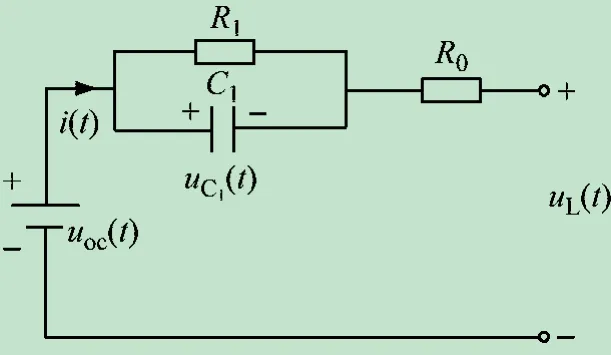
图1 一阶RC锂电池等效模型
图1 所示的一阶RC模型[12]中,各电学变量之间有如下数学关系:
式中:uoc(t)为电池开路电压;R0为内阻;i(t)为放电电流;uL(t)为端电压;C1为极化电容;R1为极化电阻。R1与C1构成表示电池极化现象的并联RC网络。对式(4)所示的微分方程进行求解,再结合SoC 对电芯的影响,得出电芯电压
式中:τ1为时间常数;f(SoC,t)为uoc(t)与SoC的关系函数。
考虑电池箱内部温度对内阻等参数的影响,将温度T引入并针对某一时刻分析[13],得
式中,E为uoc(t)与SoC、T的关系函数。在20 ℃温度条件下,电芯的放电实验所测得实验结果曲线如图2所示。占空比为20%条件下脉冲放电结果曲线如图3所示。
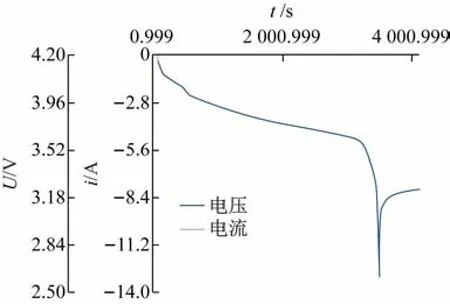
图2 20 ℃下的电芯放电曲线

图3 占空比20%的脉冲放电曲线
实验电芯为聚合物锂电池,采用参数估计方法,获得电阻与E关于温度T和SoC 的二维关系表。通过查表,可获得在某时刻t(n)电池箱物理装填下的电压输出情况,求得满足车辆动力学仿真功率需求的电流it(n)。依据式(5)可计算出下一时刻模型的SoC 以及用于计算下一时刻温度的电芯产热功率,获得下一时间步长进行仿真所用的SoC 与T。基于上述求值方法,建立如图4 所示的电芯模型。图4 中输入分别为温度T、SoC与需求功率Pt,输出为电流I、电池箱总电压U、下一时刻SoC与电芯的总产热功率Pe[14-15]。

图4 电芯模型组成示意图
使用一阶RC等效电路来模拟单个电芯,其模型结构如图5 所示,电芯主要由5 个模块构成,分别是电压输出(Em_LUT),RC并联电路中的R1、C1(R1_LUT,C1_LUT),模拟电池内阻的R0(R0_LUT)和热力学模块。

图5 电芯模型仿真示意图
电压输出模块内部结构如图6 所示。端口1、2 分别连接电压源正负极,端口3 为电芯输出电压反馈量。电压源输出电压大小决定于右侧控制网络的运算结果。

图6 电压输出模块仿真示意图
图6 中右侧控制网络是包含SoC 反馈的闭环网络,Δt时间间隔前后电源输出电压
电阻模块内部结构如图7 所示。端口2、3 分别正负极,端口1 输出电阻的即时发热功率。
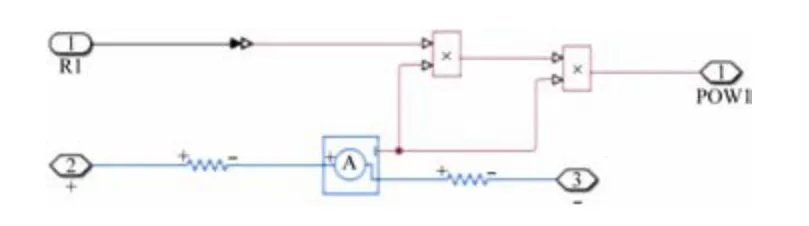
图7 电阻内部模块仿真示意图
电容模块内部结构如图8 所示,端口2、1 分别为正负极。

图8 电容内部模块仿真示意图
热力学模块内部结构如图9 所示,端口2、4 和6为接入电路的端口,电芯输出电压经测量后输出到端口6,端口3 为热力学端口,端口1 为即时电路发热功率的输入端口。输入到受控热流源后产生对应的热流,分别输出到端口5、电池蓄热体、温度计。端口5输出即时产热,电池蓄热体累积电池所产生的热量,温度计由当前热流计算出温度,并由端口3 输出温度值。

图9 热力学结构模块仿真示意图
如图10 所示为其内部结构,其中Add模块对R0、R1产热功率进行加和。

图10 额外产热Add模块仿真示意图
整个电芯模型实现了对电芯电路特性、热力学特性的模拟,包含了电压反馈控制、实时产热计算和温度监控、可拓展SoC计算和反馈控制等功能环节。将每组电芯看作一个独立的单元,表面空气流动产生对流换热,内部电芯发热当作内热源,可以看作具有内热源的非稳态导热问题。假设电芯内部热阻可以忽略,则温度与空间无关,进而可得电芯内部的热传导微分方程为
式中:Pe为电芯发热功率,由外部输入电流计算得到,其中一个电池组的内阻为36 mΩ;Vb为电芯体积,一组电池体积取为3.248 ×10-3m3;Ae为电芯对流换热面积,取0.07672 m2;T0为环境温度,取25 ℃;h为对流换热系数,可由空气流速算得;ρ 为电芯密度,可计算得到为2223 kg/m3;c为电芯比热容,取888 J/(kg·℃);电池箱中空气流基本处于层流状态,电芯可等效为长方体,在管内传热模型条件下,努赛尔数为
式中:C=0.102 为壁面摩擦因数,n=0.675,Nu=hl/λ为努赛尔数,Re=ul/v为雷诺数,Pr=v/a为普朗特数。可得:
式中:u为来流速度,由风扇进风量和车速计算得到;λ为气体导热系数,查表可得约为26.5 mW/(m·K);l为电芯平行于来流方向的长度,取0.232 m;a为空气的热扩散率,查表可得约为2.40 ×10-5m2/s;v为空气的动力黏度,查表可得约为19.2 μPa·s。
结合式(9)~(11),将相关参量代入图11 所示的电池模组热力学模型,对模型进行仿真。当车速为20 m/s时,得到温度与时间的关系曲线如图12 所示。

图11 电池模组热力学模型仿真示意图

图12 车速为20 m/s时温度与时间关系曲线
4 实车验证
为满足电动机控制器功率与电压的基本需求,选用动力电池单体的额定电压为3.7 V,最高电压为4.2 V,最小电压为3.0 V,容量为18 A·h。120 个单体电池串联,整个动力电池模组额定电压为444 V,最高电压为504 V,大于Emrax228 驱动电动机的额定电压。电池箱内设置有多个安装框,每个电池模组对应一个安装框,电池组放置于安装框内。电池箱隔板布置时,竖直方向采用横板,纵板将电池pack 分为6 个模组。采用激光焊接的方式来进行连接。将以上实验获得的模型,并结合赛车队在无人驾驶方程式大赛所设计的电池箱参数来构建电池的电路系统和物理结构,其电路设计和电池箱结构分别如图13、14 所示。

图13 方程式赛车电池箱电路设计

图14 方程式赛车电池箱结构
在散热过程中,需考量到所有模组的总散热面积。对于模型的初始条件,需考量场地的气候以及在电芯充满电条件下的初始参数。将数据代入模型仿真得到如图15 ~17 所示的仿真结果。
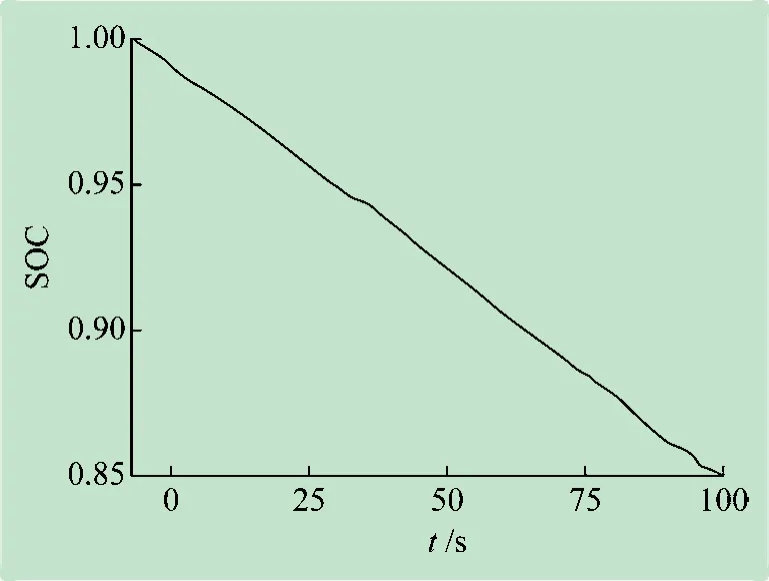
图15 SOC与时间关系仿真结果

图16 电池箱内部温度仿真结果

图17 电池箱放电电流仿真结果
由图15 ~17 所示的仿真结果可知,在车辆运行的过程中,温度有所上升但逐渐趋于平稳,电流的变化受车辆运动状态的影响较大,特别是加减速过程,总体没有超过电芯最大150 A的放电电流。在无人驾驶电车沿赛道行驶过程中,测试显示电芯的总体荷电状态从1 下降到0.85,能量仍有较大剩余,能够满足无人驾驶方程式赛车在赛道上的工作状态要求。
5 结语
本文建立了关于车辆运动与电芯的联合仿真模型,将赛车实验参数代入模型进行仿真,表明了模型的正确性。仿真结果显示,本文设计的电池箱能满足方程式赛车可靠安全性目标,全面训练了学生在无人驾驶方程式赛车电池设计方面的实验技能,激发了学生的兴趣和研究方向,通过多学科交叉培养,提升了学生的创新能力。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19 08:00:50
作文小学中年级(2022年9期)2022-09-08 06:13:30
中国自行车(2022年3期)2022-06-30 05:15:07
电源技术(2022年2期)2022-03-03 04:23:04
科学(2020年3期)2020-11-26 08:18:28
汽车维修与保养(2020年11期)2020-06-09 05:42:14
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
智富时代(2018年9期)2018-10-19 18:51:44
金色年华(2017年6期)2017-04-29 00:44:03
电源技术(2015年7期)2015-08-22 08:48:24