光纤光栅位移传感器研究与不确定度分析
2023-09-13 13:19:48陈玉璞张启明张高伟
实验室研究与探索 2023年6期
于 涛, 陈玉璞, 张启明, 张高伟, 张 鑫
(山东科技大学机械电子工程学院,山东 青岛 266590)
0 引言
随着大跨度的地下工程结构不断增加,其开挖及使用过程中的安全性问题是研究人员关注的焦点[1],位移作为反应工程结构安全状况的物理参数,可为结构健康监测提供准确可靠的信息,因此位移传感器的研究在工程实践和结构健康监测中具有非常重要的作用[2-4]。机械式或电子式传感器位移测量存在测量精度低、误差大、量程短、易受到电磁干扰及无法实现远距离监测等缺点[5-6],并且部分地下工程结构如隧道、煤矿巷道等需要多点位测量[7-9],需设计一种能够克服上述弊端的位移传感器。
光纤光栅传感方式以体积小、耐腐蚀、抗干扰能力强等优点,迅速成为国内外研究重点并广泛应用于各个领域[10-12]。本文设计了一种弹簧与传感元件相结合的结构简单且高精度的双等强度梁式光纤光栅位移传感器,可以实现温度自补偿;设计标定实验,并分析静态特性和实验过程中的不确定度,为位移监测提供了一种行之有效的方法。
1 位移监测原理
光纤光栅位移传感器测量原理是将等强度梁和光纤光栅作为传感元件,等强度梁是一种特殊的变截面梁,其轮廓为等腰三角形,当三角形顶点处受到集中载荷时,其表面沿轴线方向的最大正应力和应变均相等[13]。由于光纤光栅比较脆弱且受到不均匀应变时容易产生啁啾现象,影响测量精度,利用等强度梁不仅保护了光纤光栅,消除了啁啾现象,而且降低了光纤光栅的粘贴精度要求。将弹簧与传感元件串联,当被测结构发生位移,弹簧形变产生的弹力作用于等强度梁上,引起梁表面应变变化,导致光纤光栅波长漂移,建立波长与位移之间的关系即可通过监测波长值来获得位移量。
当被测结构产生位移时,位移L为弹簧形变量Δx与等强度梁挠度m之和,即:
弹簧形变产生的弹力F作用于等强度梁三角形顶点处,根据材料力学可知梁的挠度和应变为:
式中:l为梁的跨度;E为梁的弹性模量;b为梁固定端宽度;h为梁的厚度。由式(1)和(2)可得等强度梁表面应变与位移的关系为
式中,k为弹簧刚度,本文取k=0.4。
实际测量过程中,光纤光栅粘贴在等强度梁上,胶体与等强度梁、光纤光栅的弹性模量存在差异,因此等强度梁真实应变与光纤光栅所测应变并不相同,光纤光栅受到的应变为
式中,η为应变传递率,本文取η =98%。光纤光栅的波长受外界应变和温度变化的影响,当应变和温度同时作用时,波长漂移量ΔλB与应变和温度T的关系[14]为
式中:λB为光纤光栅初始波长;Pe为弹光系数;αf为热膨胀系数;ξ为热光系数。令
则式(5)可简化为
在每个等强度梁上均粘贴有光纤光栅,另外串联一根不受力只受温度影响的光纤光栅,对温度造成的波长漂移进行补偿,降低温度对传感器测量结果的影响:
将式(4)代入式(8)可得波长漂移与位移的关系为
由式(9)可知,位移与光栅波长之间呈线性关系,并且传感器灵敏度大小主要由等强度梁尺寸决定,因此可以根据量程要求合理设计等强度梁的尺寸,实现不同量程的位移监测。
2 位移传感器结构设计
图1 所示为设计的光纤光栅位移传感器结构示意图,等强度梁固定在外壳底部,每个梁的下表面均粘贴有光纤光栅,不受力的光纤光栅与其余两个光纤光栅串联,对其进行温度补偿;弹簧一端与等强度梁串联,另一端固定在金属拉杆上。测量时传感器通过弹簧将位移量转变为等强度梁自由端挠度的变化量,从而引起光纤光栅中心波长的变化。
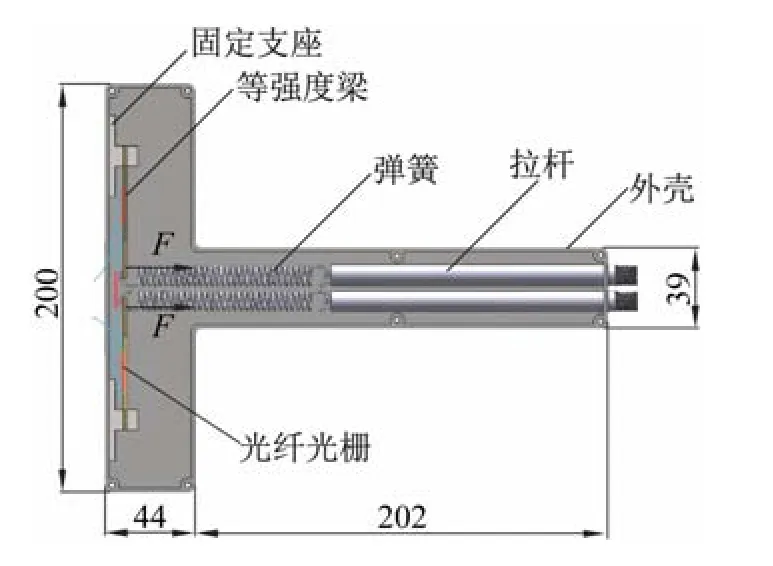
图1 光纤光栅位移传感器结构图
为提高传感器灵敏度,应合理选择等强度梁的尺寸和材料。本设计的等强度梁l=50 mm,b=22 mm,h=2 mm。为方便与弹簧连接,在三角形顶点处设计了牵引孔,直径为φ3 mm;材料选择时弹性模量不宜过大,弹性模量大,传感器达到最大量程时,材料变形量较小,光纤光栅的材料性能得不到充分发挥,因此材料选用具有良好力学性能,可承受较大载荷的H62 高强度黄铜。其中E=106 GPa,密度为8430 kg/m3,泊松比为0.324,屈服强度为350 MPa,许用应力为291 MPa。如图2 所示为封装好的传感器实物图。
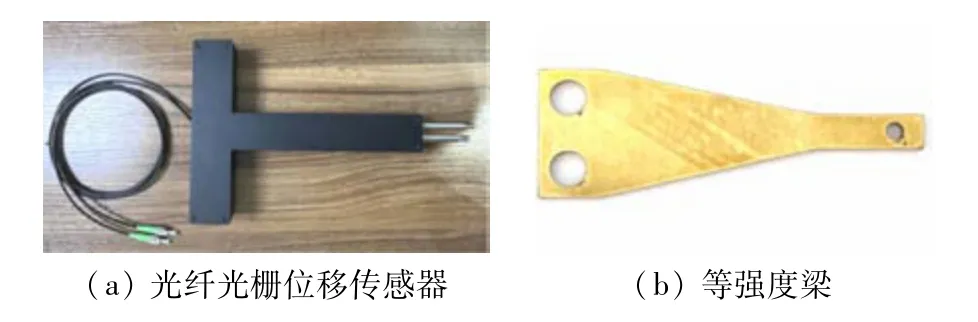
图2 传感器与等强度梁实物图
3 传感器性能测试
3.1 标定实验与结果分析
传感器标定实验平台如图3 所示,由拉伸试验台、光纤光栅、上位机及光纤光栅解调仪组成,其中解调仪的工作波长范围:1510 ~1590 nm,波长分辨率1PM。实验前用酒精将等强度梁表面擦拭干净,用CC-33A胶水将光纤光栅粘贴在等强度梁下表面中轴线位置,保证胶水完全固化后方可进行实验。实验过程为:①记录0 刻度时的初始波长值,通过拉伸试验台控制位移量,从0 逐步增大至180 mm(正行程),位移步长10 mm,待波长稳定后记录数据值;②再将位移量从大到小以相同的位移步长逐步减小至0(逆行程);③为减小误差对测量结果的影响,共进行3 次重复实验。
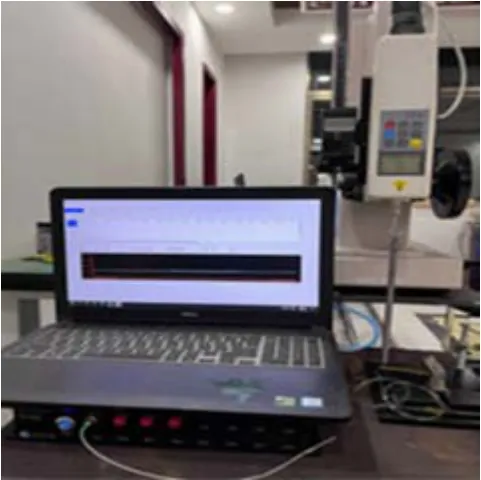
图3 标定实验平台
如图4 所示为光纤光栅位移传感器的L与λ变化关系图,由图可知,λ 随着L的增大呈线性上升的趋势。传感器的灵敏度系数为10.16 pm/mm,相关系数可达0.998,各点位的3 次实验结果之间离散度较小,表明传感器的位移与波长呈现良好的线性关系,并且稳定性较好。本文光纤光栅解调仪的波长分辨率为1PM,因此,传感器分辨率可达98 μm,可以准确检测到0.1 mm的微小位移变化。
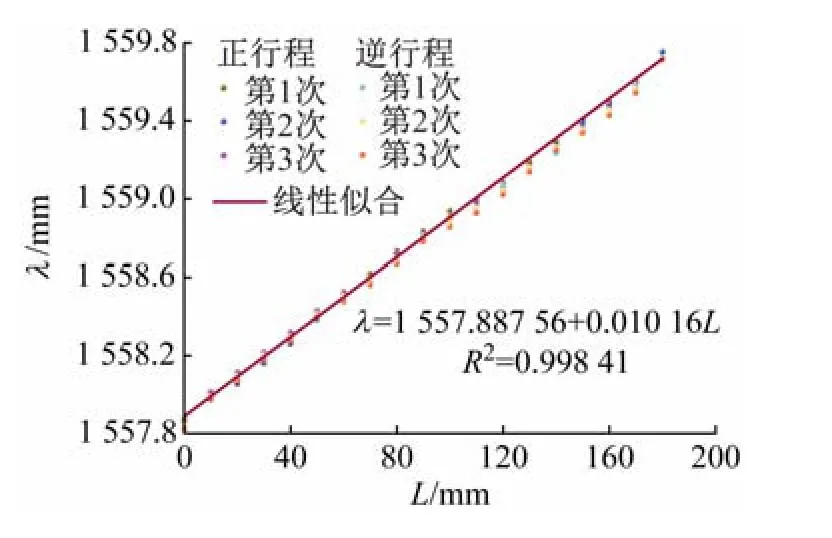
图4 光纤光栅位移传感器标定测试拟合曲线
3.2 静态特性分析
为保证传感器能稳定可靠的监测位移,要求其具有良好的静态特性,静态特性的主要指标包括灵敏度、线性度、重复性和迟滞性。将标定数据整理后分析其静态特性指标(见图5),光纤光栅位移传感器的最大非线性绝对误差为0.058;线性度为3.2%;正向和反向行程的最大输出差值为0.046;迟滞性为2.52%;最大输出非重复性误差为0.026;重复性为4.32%;静态误差为5.92%;灵敏度为0.01016。实验结果表明,该传感器性能表现良好,验证了结构的合理性。
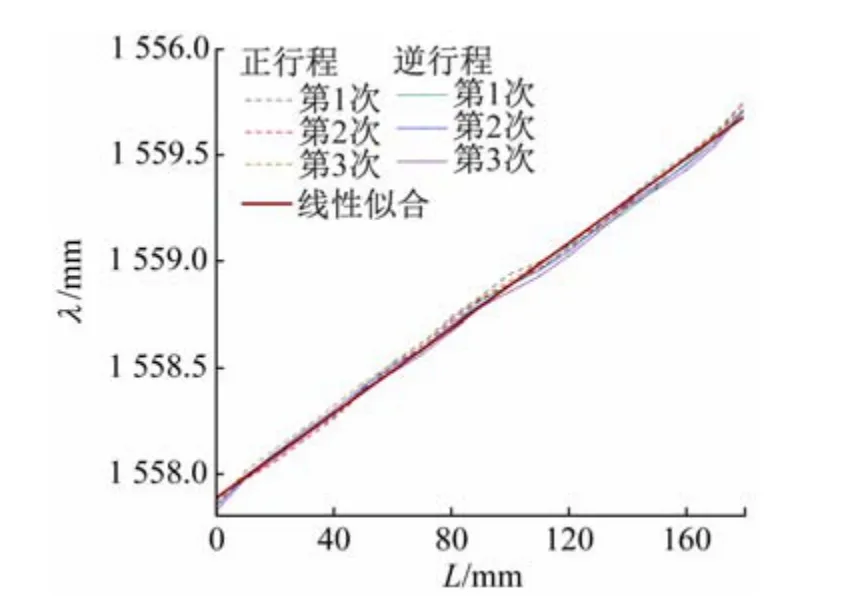
图5 光纤光栅位移传感器静态特性曲线
4 不确定度分析
标定过程中对同一变量进行多次实验,受到实验环境、实验装置及人为因素的影响,会导致结果具有不确定性,因此应根据JJF1059.1—2012《测量不确定度评价与表示》对实验平台进行不确定度分析[15]。
(1)重复性引入的A 类不确定度。实验过程中,由于实验环境的变化以及实验人员都会导致不确定度的存在,不确定度
式中,n为实验次数,n-1 为自由度。通过3 次正反行程实验结果可得各个位移点u1(L),求平均值可得u1(L)=0.827 mm。
(2)温度变化引入的不确定度。实验过程中环境温度最大为26 ℃,最小为24 ℃,温差为2 ℃,传感器量程180 mm,光纤光栅的热膨胀系数为8 ×10-6/℃,因此温度变化引入的不确定度
(3)解调仪引入的不确定度。光纤光栅解调仪自身的不确定度也会造成传感器的不确定度,该解调仪的波长分辨率为1PM,根据传感器灵敏度系数可知解调仪的位移测量分辨率为0.098 mm,根据测量装置引入的不确定度计算方法[16],可得:
(4)标准合成不确定度。受多个因素影响形成的多个不确定度之间相互独立,则标准合成不确定度
通过分析可知实验平台的不确定度为0. 8279 mm,在量程范围内,不确定度对结果的影响较小,保证了结果的可靠性。
5 结语
本文将等强度梁特性与光纤光栅的传感原理相结合,设计了一种量程可达180 mm 的两点式光纤光栅位移传感器,根据标定实验及不确定度分析,结果表明:①光纤光栅位移传感器的灵敏度系数为10. 16 pm/mm,分辨率为98 μm,线性度为3.2%,重复性为4.32%,迟滞性为2.52%,静态误差为5.92%,性能表现良好;②实验平台的不确定度为0.8279 mm,对结果影响较小,符合标定要求,保证了结果的可靠性。
本文设计的光纤光栅位移传感器具有灵敏度高、抗电磁干扰能力强及温度自补偿等优点,能够在精度要求较高且需要多点位测量的复杂工作环境下开展长期监测工作。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
煤气与热力(2021年4期)2021-06-09 06:17:06
汽车维修与保养(2020年11期)2020-06-09 05:42:16
石油化工自动化(2018年5期)2018-11-14 02:34:16
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
高师理科学刊(2016年8期)2016-06-15 20:27:46
通信电源技术(2016年1期)2016-04-16 04:57:35
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:41
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38