非合作C模式信号识别与无源定位仿真分析
2023-09-13 02:05王俊文周浩天王盼盼
雷达与对抗 2023年2期
王俊文,周浩天,王盼盼
(中国电子科技集团公司第三十八研究所,合肥 230088)
0 引 言
与一次雷达利用目标散射雷达发射的电磁波对其进行探测定位的原理不同,二次雷达由地面询问机和机载应答终端合作完成定位。高精度无源定位[1]是一种非合作监视技术:当多站定位时,在不增加机载设备的前提下,可以通过多个地面无源接收站接收机载应答机信号,提取到达时间差或各个站点独立测向值,实现目标时差或测向交叉定位;当单站定位时,可以通过地面无源接收站对接收的机载应答机信号进行方位和俯仰两维测向,结合应答机高度码联合实现目标定位。
民航机载应答机发出的应答信号包括A模式代码、C模式高度和S模式信息,其中A模式代码和C模式高度代码的脉冲形式完全相同。在二次雷达合作模式下,地面雷达询问站通过询问脉冲实现应答脉冲的模式识别,而在非合作无源定位系统中,因不知道地面雷达站发出的询问脉冲类别,也就无法判别收到的应答是A模式还是C模式。因此,对于一个单站无源定位系统,如何从接收到的繁杂的机载应答信号中识别出C模式,并提取高度信息、提高单站的两维测向精度尤为重要。
1 A/C模式脉冲编码规则与识别
A/C模式应答信号时序如图1所示,其中F1、F2为框架脉冲,脉冲间隔为(20.3±0.1)μs, SPI是特殊位置识别码脉冲,这3个脉冲时序固定为0 μs、20.3 μs、24.65 μs。信息脉冲包含A、B、C、D共4类,每一类都包含3个信息。两框架脉冲之间的12个码可以编成4 096个独立的应答码,相邻信息脉冲时间间隔为1.45 μs,脉冲宽度均为0.45 μs。备用脉冲X恒为低电平。在F2脉冲后4.35 μs位置的为SPI脉冲,用于区分来自两个应答目标的两组相同的应答码。应答信号中的信息由12个脉冲携带,二进制1代表该脉冲存在,二进制0代表该脉冲不存在。对应于不同的询问模式,应答信号可以传递的信息包括识别代码、高度信息等。

图1 应答信号时序图
由于A/C模式应答信号采用相同的格式,信息脉冲的标志和位置也一样,在非合作模式下,在接收到A/C应答码后,无法知道是高度码还是识别码。通过分析两种模式信号的编码规则以及实际工程应用场景[2-5],非合作接收A/C码识别可以采取排除法,工程应用中的具体操作方法总结如下:
(1)在信号处理完成机载应答信号脉冲参数测量以及信号分选后,将结果输出至数据处理,数据处理将分选输出的12位信息重新从高到低排列,格式为A4A2A1、B4B2B1、C4C2C1、D4D2D1,并按照8进制进行翻译显示,如果分选输出的SPI脉冲标识位出现,则该条码字判为模式A;
(2)按照步骤(1)进行翻译码字,若翻译码字信息为7 500、7 600、7 700之一,则该条码字判为模式A(特殊危急信息代码);
(3)按照步骤(1)进行翻译码字,若翻译码字中C为0、5、7之一,则该条码字判为模式A。因为在高度编码中,C组码是5周期循环码,连续递增5次,标准循环码才递增1次,若信息码C组尾数为1、2、3、4、6,可能是高度码,也可能是识别码;
(4) 按照步骤(1)进行翻译码字,若翻译码字中D为1、2、3、5、6、7之一,则该条码字判为模式A因为根据高度编码规则,若 D1为1,等同于飞机高度大于30 km,目前的民航飞机还未达到此高度,故D1为0;另外,民航飞机飞到18 km的概率也较少,D2基本也为0;
(5)在其他情况下,可根据无源接收站点的位置,判定接收机是处于机场附近起降区域,还是机场外飞机航路航线飞行区域,因为在航路航线飞行区域,C模式高度码通常不会发生变化,可以结合中国民航划定5 000 m以上不同飞行高度层与对应编码之间的关系以及飞机的飞行航向进行综合判断。
2 结合高度码的单站定位算法模型
机载应答信号单站无源定位系统利用单站分别对目标信号进行方位、俯仰两维高精度测向,并结合飞机C模式高度码信息对目标进行单站定位。假设目标在大地坐标系中方位角为α、俯仰角为β、高程信息为h,侦察站与目标距离为s,地球半径为R,单站无源定位模型如图2所示。

图2 单站无源定位模型
假设目标在直角坐标系中的位置为x、y、z,通过大地坐标系与直角坐标系转换可得
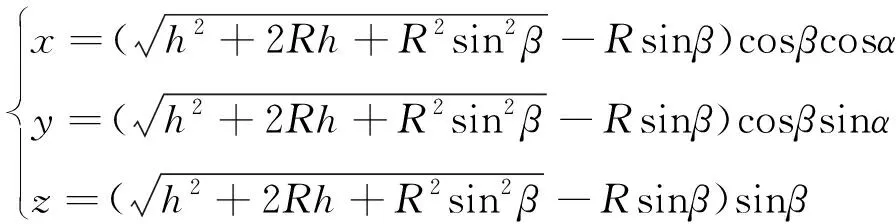
(1)
为了描述定位误差与几何位置的关系,引入定位精度的几何稀释度GDOP来描述定位误差的三维几何分布,其表达式为

(2)
式中,δx、δy、δz分别为3个方向上的定位标准差。
定位方程可表示为

(3)
微分可得

(4)
定位误差协方差矩阵可以表示为
PdX=E[dXdXT]=C{E[dVdVT]}CT
(5)
式中,
假设方位角度测量Δα、俯仰角度测量Δβ、高度信息测量Δh的误差均服从零均值、标准差分别为δΔα、δΔβ、δΔh的高斯分布。单站定位GDOP为

(6)
3 仿真分析
通过上述算法模型推导可知定位精度受方位、俯仰等观测值影响,考虑高程测量精度10 m情况下,针对不同测向误差情况进行仿真。
仿真1:方位测角精度1°、俯仰测角精度1°,不同高度与俯仰角度目标的GDOP如图3所示。

图3 不同高度与俯仰角度下目标定位精度仿真1
仿真2:方位测角精度0.5°、俯仰测角精度0.5°,不同高度与俯仰角度目标的GDOP如图4所示,两维测向精度较仿真1得到提高,定位精度提高明显。

图4 不同高度与俯仰角度下目标定位精度仿真2
仿真3:方位测角精度0.3°、俯仰测角精度0.5°,不同高度与俯仰角度目标的GDOP如图5所示,方位测向精度较仿真2得到提高,对定位精度的影响较小。

图5 不同高度与俯仰角度下目标定位精度仿真3
仿真4:方位测角精度0.5°、俯仰测角精度0.3°,不同高度与俯仰角度目标的GDOP如图6所示,俯仰测向精度较仿真2得到提高,定位精度提高明显。
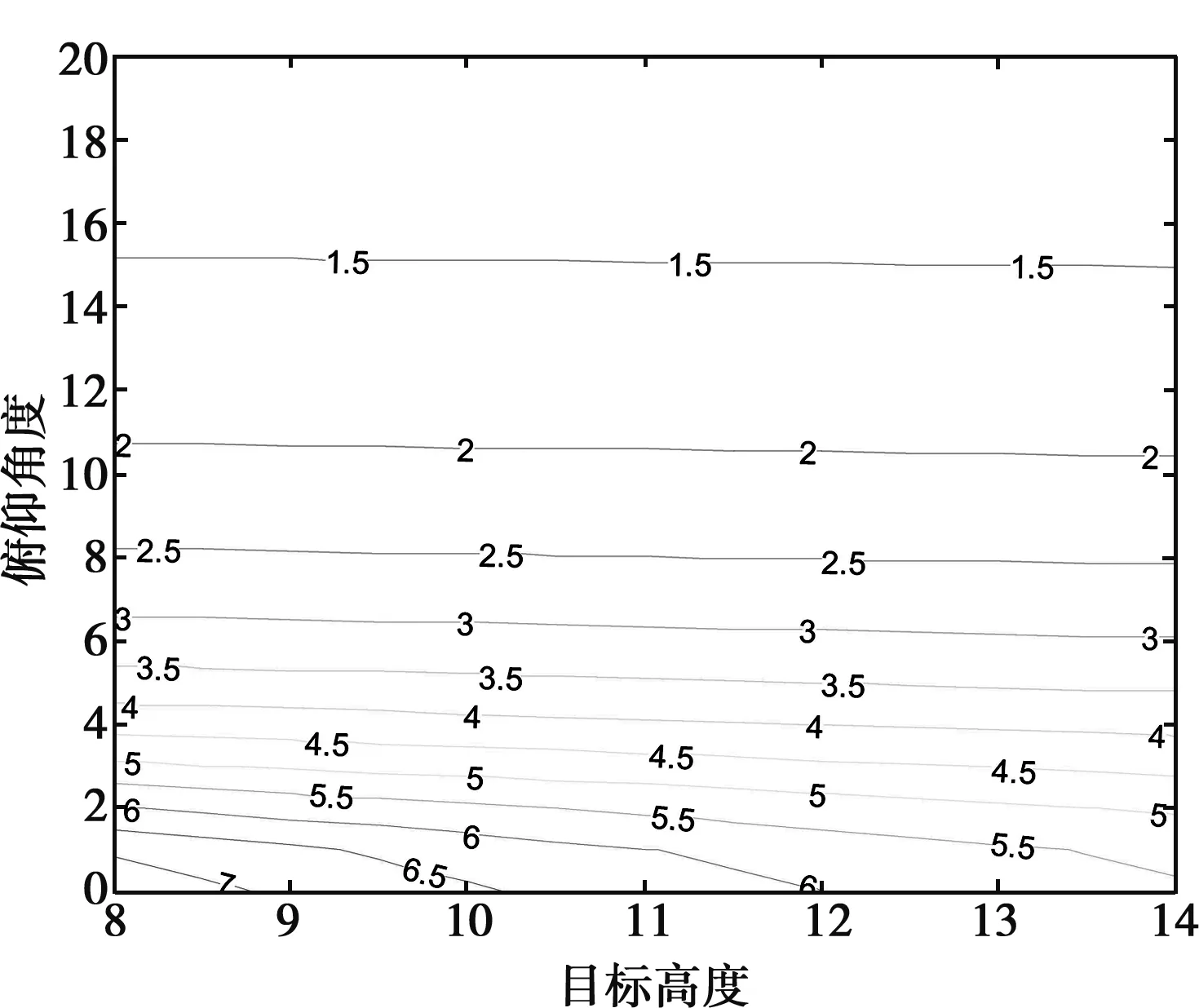
图6 不同高度与俯仰角度下目标定位精度仿真4
可以看出,结合高程信息的单站无源定位模型受测角精度影响较大,俯仰测角精度的影响比方位测角精度的影响大;要实现工程可用的定位精度,测角精度须控制在0.3°~ 0.4°左右,尤其是俯仰测角精度。
4 结束语
单站无源定位是一种新式高效目标定位技术,相对于多站时差与测向交叉等无源定位系统,具有系统简单、高效等特点。本文针对机载应答A/C模式信号特点,分析并总结相关识别方法,工程实用性较强;在此基础上推导并仿真了基于方位、俯仰测角信息与高程信息的单站无源定位算法,可为单站无源定位系统的设计和工程应用提供参考。
猜你喜欢
——2022 F1意大利大奖赛
世界汽车(2022年5期)2022-06-10
加油站服务指南(2021年7期)2021-10-14
雷达与对抗(2021年4期)2021-03-18
电子制作(2019年12期)2019-07-16
航天电子对抗(2018年3期)2018-07-14
电子测试(2018年6期)2018-05-09
北京航空航天大学学报(2017年6期)2017-11-23
互联网天地(2016年2期)2016-05-04
测绘科学与工程(2016年6期)2016-04-17
电测与仪表(2015年13期)2015-04-09