基于PSO-BP神经网络的雷达电源组件温度预测新方法
2023-09-13 07:40黄大荣
雷达与对抗 2023年1期
唐 敏,黄大荣,唐 环,赵 宁,张 宇
(1.重庆交通大学,重庆 400074;2.北京可维卓立科技有限公司,北京 100191;3.中国船舶集团有限公司第八研究院,南京 211153)
0 引 言
大型装备中的电源组件功率一般较高,随着工作进程的延长,器件本身温度逐渐上升,其可靠性受到极大限制,进而影响雷达系统的整体可靠性[1]。为确保雷达电源组件及其相关组件部分整体系统的可靠性,采用合理的方法预测电源组件的温度,在工程上尤为重要。
目前,关于温度预测分析方面的研究成果主要集中在差热分析、导数热重量法和热重量法等热分析方法上[2-8],针对的基本都是特定设备。在雷达热控系统散热设计方面,文献[9]针对某型雷达产品的电源组件结构,开展了基于有限元的动态响应及热仿真分析,验证了结构设计的有效性;针对功放组件和电源组件这两个主要发热组件,文献[10]在箱体的两端安装风机形成一个风道,在结构设计的基础上进行热仿真分析,证实了该设计的可行性。这些研究成果有一定的适用性,但由于液冷散热、空气自然对流等多种因素的干扰,元器件功耗估算的准确性难以得到保证。
本文以雷达电源组件为研究对象,在详细分析电源组件流固耦合模型的基础上,提出一种基于PSO-BP神经网络的雷达电源组件温度预测新方法,并采用某大型装备相控阵雷达的电源组件实际工程数据进行验证,为实现特定设备领域的雷达电源组件温度预测提供了新的思路。
1 雷达电源组件流动-传热分析
雷达电源组件的电源板具备大功率特性,往往借助于组件内部的水道进行散热。在对雷达电源组件进行热分析时,须考虑自身组件的流固耦合情况,工程上一般通过构建流、固体模型分别阐述。
在流体模型分析中,雷达电源组件内部流体的流动状态通过雷诺数判定:

(1)
式中,ρ为雷达电源组件中散热流体的密度;v为散热流体的速度;μ为粘性系数;d为散热管道的特征长度。
雷诺数与流体状态的分类标准:当雷诺数Re≤2 300时,流体为层流流动;当雷诺数Re处于2 300~4 000时,属于过渡状态;否则视为湍流流动。
显然,工程师可针对实际情况,对各种温度情况下的流体状态进行合理分类。以水温27 ℃情况为例,其主要参数如表1所示。

表1 27 ℃时水的主要参数
由表1可得雷诺数为1 942,依据前述物理特性结论,可明确电源组件中冷却液体在管道中的流动状态为层流。
雷达电源组件水道热传导方程为

(2)
式中,Ts为电源组件的水道温度;t为雷达电源组件运行时间;x、y分别为雷达电源组件水道的横纵坐标;c为水道比热容;k为水道的热传导系数。
根据计算流体力学,在流体模型的分析中所有流体满足质量守恒方程:

(3)

在此基础上,还应该满足动量守恒方程:

(4)

此外,针对雷达电源组件固体模型,主要考虑内部流体与水道内壁的耦合面,其基本方程为
Ts=Tf
(5)

(6)
式中,Tf为电源组件水道内流体温度;ks为水道的热传导系数;kf为其水道内流体的热传导系数。
通过上述分析即可完成雷达电源组件流固耦合分析,并对其内部温度进行合理分析,进而完成既定的温度预测目标。
须要注意的是,雷达电源组件内部的散热装置以及空气对流等常常导致雷达电源组件的热分析出现较大误差。为了提高整体温度预测准确率,调整该类误差是实际工程中须迫切解决的关键问题。
2 基于PSO-BP神经网络的温度预测模型
BP神经网络具备在模拟过程中可将误差传回,并动态调整神经元权重,能确保整体最终输出结果准确性的特性[11]。本文引入BP神经网络进一步构建雷达电源组件的温度预测模型。
为简便分析,首先选取与雷达电源组件温度有密切关联的参数作为BP神经网络的n个输入,基本表示符号如下:
X=[x0,x1,x2,…,xn]
(7)
式中,xi,i=1,…,n为雷达电源组件输入参数。
选取雷达电源组件温度相关参数的权重向量为
W=[wi1,wi2,…,win]T
(8)
则对应的神经元为

(9)
式中,θ为输出层阈值。
在实际操作中,将雷达电源组件的温度与输入参数进行映射,假设映射函数为f,则输出向量与神经元之间的关系为
yi=f(neti)=f(XW)
(10)
由于BP神经网络可将误差动态传给输入,进而调整神经元权重,因此,对于m个给定的雷达电源组件的训练样本,设定误差函数为
(11)
式中,E(i)为单个样本的训练误差,其模型为

(12)
式中,y(i)为对应输入x(i)的期望温度输出值;d(i)为对应输入x(i)的实际输出温度值。
考虑到雷达电源组件期望温度输出值与实际输出温度值存在误差,须对权重进行更新。构建权重更新迭代计算模型为
(13)
利用上述模型,雷达电源组件温度能取得一定预测效果。但在实际运行中,会根据实际工况不断改变上述依据传统BP神经网络模型的参数,网络收敛性难以保证,训练结果极容易陷入局部极小值,将直接导致雷达电源组件温度预测值准确率很难匹配工程实际值。本文引入PSO和BP混合算法来优化电源组件温度预测模型。
设在预测温度值的d维搜索空间中有M个粒子,其中第i个粒子的位置为Xi=xi1,xi2,…,xid,该粒子与期望输出温度值最接近的位置为Pi=pi1,pi2,…,pid。为减小实际输出温度值与期望值的误差,须更新部分误差较大样本的阈值或权重,将粒子速度更新公式修订为
式中,u为雷达电源组件中样本的惯性权值;c1、c2分别为其样本的加速系数;r1、r2分别为两个在[0,1]内变化的随机数。
为获取实际输出温度值与预期值之间的误差较小值,将雷达电源组件样本网络的权值视为PSO算法中粒子的速度。权值的改变相当于粒子速度的改变,可按照下式计算:
为验证本文方法,采用平均绝对百分比误差yMAPE和均方根误差yRMSE评价电源组件元器件的温度预测效果:
(17)
(18)
式中,ya(i)为雷达电源组件期望输出温度值;yb(i)为实际输出温度值。
设定评价规则如下:误差yMAPE和yRMSE越小,代表温度预测误差越小,预测模型越准确,因此利用这两个指标即可实现对雷达电源组件温度预测模型的评估。
3 算法设计与分析
基于PSO-BP神经网络的雷达电源组件温度预测具体步骤(详见图1)可设定如下:
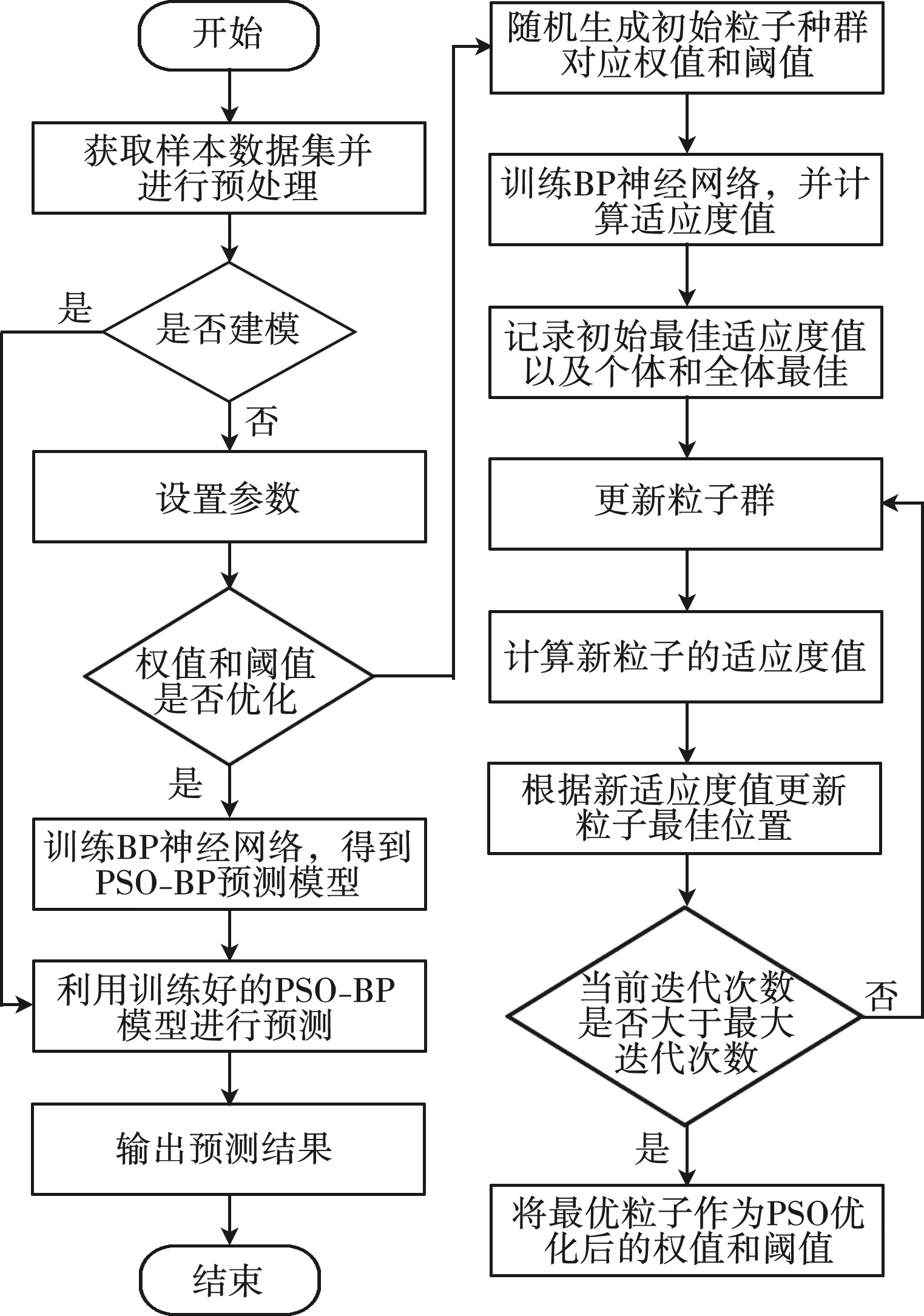
图1 电源组件温度预测流程
(1)确定雷达电源组件输入神经元与输出神经元个数;
(2)初始化雷达电源组件输出温度粒子群规模;
(3)粒子适应度值为雷达电源组件温度预测值和温度期望值的绝对值误差之和;
(4)比较粒子适应度;
(5)更新雷达电源组件温度粒子位置及速度;
(6)比较当前迭代次数与设定的最大迭代次数,若超过最大迭代次数,则终止算法,否则跳至步骤(2),进行下一次迭代。
当前太湖流域正处在工业化、城镇化快速发展的特殊阶段,与河湖争地、违法设障、地方保护等问题比较突出,河湖执法任务依然十分艰巨。下一步太湖流域管理局将按照深化水利改革的总体部署,陈雷部长重要批示精神和全国水政工作会议严肃查处水事违法案件、严厉打击违法侵占河湖水域等违法行为,加强水生态文明建设的要求,围绕中心,服务大局,继续深入贯彻实施《太湖流域管理条例》,以增强队伍执法能力为核心,进一步加大直接查处力度,深化联合执法机制,强化层级监督,不断加强流域河湖水域岸线保护,为流域水生态文明建设提供法治保障。
4 仿真与试验结果
为验证本文算法的合理性,选取某型天线雷达的电源组件为基本物理模型,实验平台如图2所示,平台进水、出水的基本结构如图3所示。

图2 电源组件实验平台

图3 某雷达电源组件出水和进水示意
4.1 电源组件数值仿真边界条件
在Ansys Fluent仿真中划分网格,包含654 764个节点和3 175 027个单元,将电源组件数值计算中的边界条件设置如下:
(1)进口边界条件:电源组件流体端口为流体入口,入口边界采用速度入口边界;
(2)电源组件水道中的水流速为0.1 m/s,水温恒定27 ℃;
(3)出口边界条件:电源组件的流体出口,出口边界采用压强出口边界条件。
4.2 数值仿真结果分析
基于上述物理结构模型设置Fluent仿真边界条件,计算模型采用SIMPLE算法,仿真得到电源组件水道温度云图如图4所示,其中入水口区域的液体温度较低,大约为26.85 ℃,出水口区域温度较高,为31.29 ℃。可以看出,水道出口的温度高于水道入口的温度,符合实际工程现象。
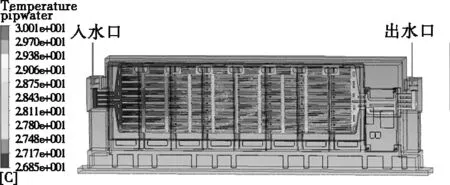
图4 水道液体速度云图
电源组件的关键元器件温度云图如图5所示,呈现层状分布,最高温度在电源组件的电源板上,这是因为电源板自身功耗、散发的热量都较大。
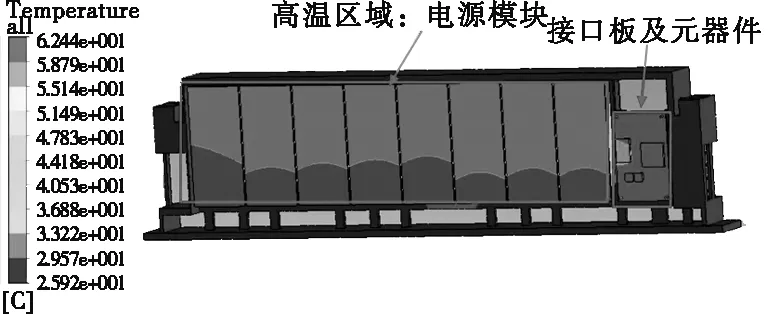
图5 电源组件元器件温度云图
采用Ansys Fluent对比分析电源组件的仿真温度数据与工业实测温度,结果如表2所示。12个元器件的误差均在-10%~10%之间,初步验证了温度仿真的可靠性。
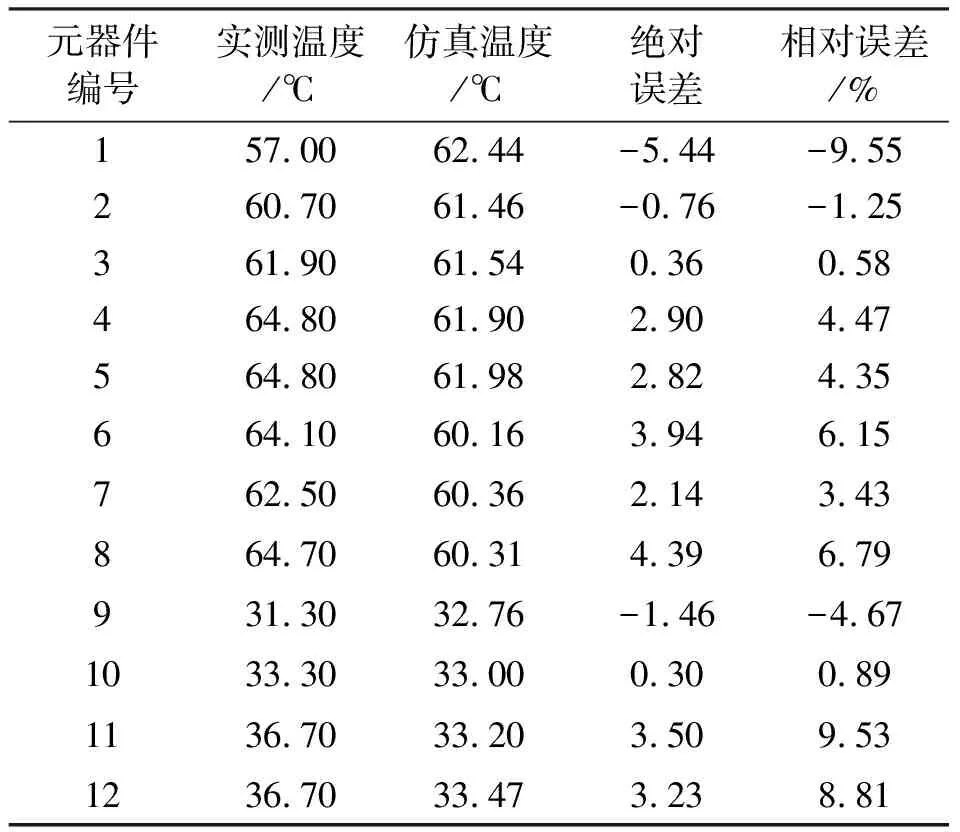
表2 仿真温度与实测温度
4.3 PSO-BP温度预测结果分析
以电源组件12个元器件为例,将BP神经网络预测值、PSO-BP神经网络雷达电源组件输出的预测值与实测值进行对比,结果如图6所示。
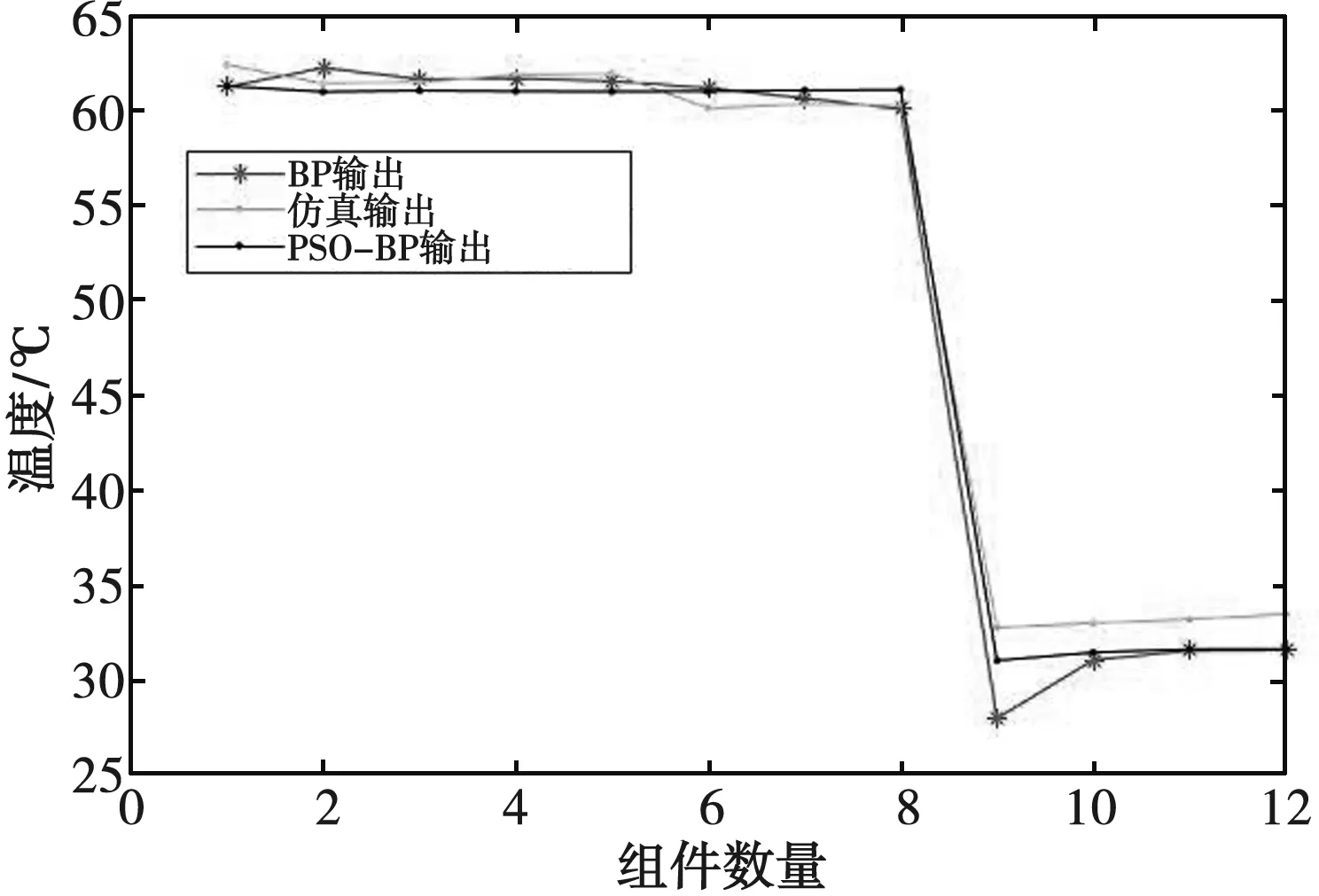
图6 不同算法输出值与实测值对比
可以看出,与传统BP神经网络相比,PSO-BP神经网络模型的输出预测值与实测温度的拟合度更高。
对比分析传统BP算法和本文算法的残差实验结果,如图7所示。
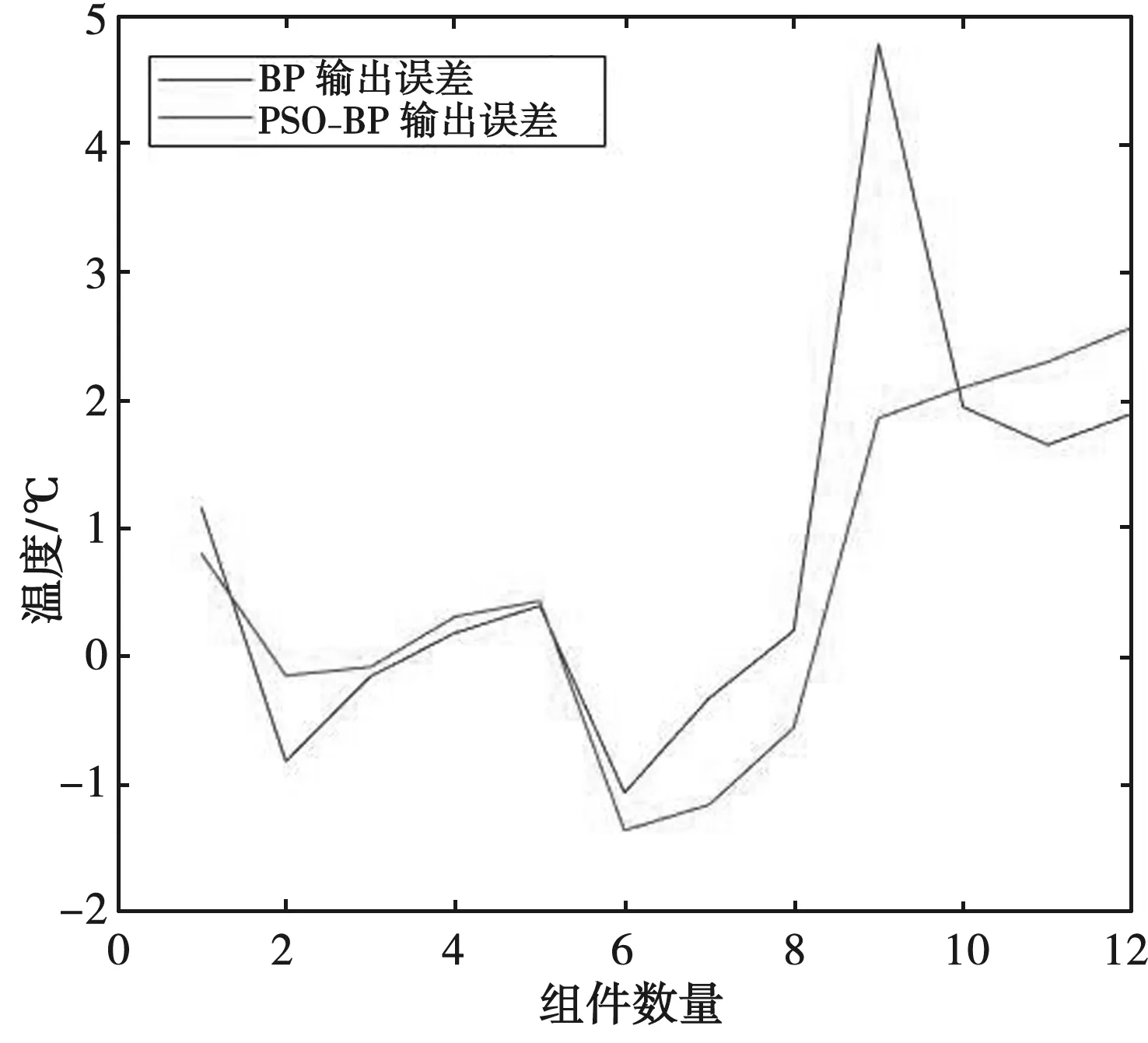
图7 不同算法输出值与观测值拟合曲线
可以看出,BP神经网络预测的误差在[-1,5]之间波动,而PSO-BP神经网络的预测误差在[-1,3]之间波动,对应12个元器件,其中有10个元器件的误差明显小于BP神经网络预测的误差。
为进一步验证本文算法的有效性,采用RMSE和MAPE作为算法的性能评价,结果如表3所示。可以看出,本文算法均低于传统BP算法。
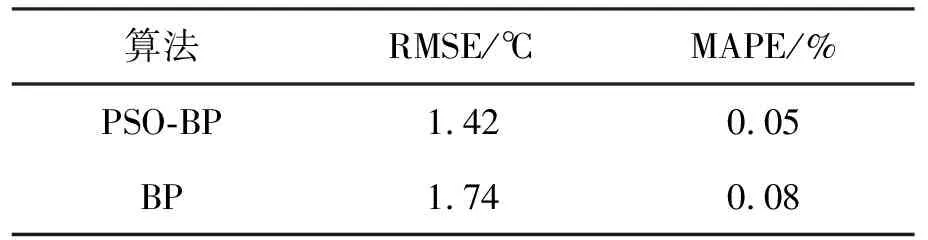
表3 不同算法性能评价
显然,本文算法在实际温度预测实践中的预测精度更好,同时在一定程度上避免了雷达电源组件使用传统BP神经网络算法的温度训练结果容易陷入局部极小值的缺陷。
5 结束语
针对雷达电源组件元器件温度高影响其可靠性的问题,考虑雷达电源组件水冷散热的条件,本文在对其进行热分析的基础上,提出了基于PSO-BP神经网络的雷达电源组件温度预测新方法,得出结论如下:
(1)针对雷达电源组件通过内部水道散热情况分析流动-传热,在此基础上对雷达电源组件进行热分析,得到电源组件关键元器件和水道中流体的温度分布云图,与实测温度对比,误差都在10%以下,证明了热分析的准确性,消除了雷达电源组件散热不及时对可靠性的影响;
(2)为克服雷达电源组件数值模拟时间耗时较长,以及受到多种因素干扰导致热分析结果误差的问题,提出了基于PSO-BP神经网络的雷达电源组件温度预测新方法,以实现对雷达电源组件的温度预测。
本文方法基于雷达电源组件温度数值模拟结果,然而在实际工程中,由于雷达电源组件运行状态等限制,无法提供所提方法的输入坐标等数据,因此仍须改进。
猜你喜欢
中国石油大学学报(自然科学版)(2022年3期)2022-07-26
能源工程(2022年2期)2022-05-23
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
大众科学(2020年7期)2020-10-26
重型机械(2020年2期)2020-07-24
装备制造技术(2019年12期)2019-12-25
小猕猴智力画刊(2018年2期)2018-02-26
石油地球物理勘探(2017年2期)2017-11-23
中国三峡(2016年11期)2017-01-15
太阳能(2015年11期)2015-04-10