
无人机激光扫描技术在矿区地形测量中的应用
2023-09-09 08:08:12李运江
山东煤炭科技 2023年8期
李运江 王 冬 高 旭
(1.内蒙古昊盛煤业有限公司,内蒙古 鄂尔多斯 017212;2.山东科技大学测绘与空间信息学院,山东 青岛 266590)
石拉乌素煤矿位于鄂尔多斯高原中南部,矿区地表呈现典型的高原堆积型沙丘地貌特征,地表大部被第四系风积沙所覆盖,植被稀疏,为沙漠~半沙漠地区。在沙漠环境从事传统地形测量工作困难,目前在矿区地形测量工作中,无人机测量方式逐渐开始运用,测量效率有了很大提升[1]。以无人机激光扫描为代表的空间测量技术,能够快速、有效地采集地表的坐标数据和影像数据,获取真实的地表形态[2]。无人机激光扫描技术能够弥补传统测量方法在矿区测量过程中所暴露的测量效率低、准确性差等问题[3],故将其引入矿区地表地形测量工作中,不仅大幅提高了地形测量的效率,更为矿区生态环境监测、地面沉降监测等工作提供了巨大便利。
1 基本原理与流程
1.1 无人机激光扫描系统原理
无人机激光扫描系统是以固定翼或多旋翼无人机作为载体平台,高度集成多种电子设备的新型测量系统。其主要由无人机、激光雷达测距仪、全球导航卫星定位系统(Global Navigation Satellite System,GNSS)、惯性导航系统(Inertial Navigation System,INS)以及成像系统和控制单元等设备组成。激光测距仪可以快速精准地对地表信息进行采集,获取被测对象离散随机分布的三维空间点云数据。GNSS 为系统提供实时的空间位置信息,INS 通过陀螺仪和加速度计等惯性传感器测定系统的飞行姿态、位置信息和飞行速度等,以提高导航定位信息的准确性。成像系统能够采集地面的高分辨率影像,通过影像配准的方法,可以使点云数据具有被测地物的真实色彩RGB 信息。控制单元负责协同GNSS、INS 以及激光测距仪等设备,存储采集得到的测量数据,同时将系统飞行轨迹与系统各个组成结构的实时工作状态等信息提供给地面控制台。上述单元的集成,能使无人机激光扫描系统在GNSS 和INS 提供的位置信息下,快速获取地面的高精度激光点数据,图1 为无人机激光扫描系统的测量原理。

图1 无人机激光扫描系统测量原理
1.2 无人机激光扫描地形测量方案
1.2.1 激光雷达系统选择
试验选用的激光雷达系统集成了RIEGL miniVUX-1UAV 无人机激光扫描仪,该型激光扫描仪坚固、轻巧、结构紧凑,质量仅为1.55 kg,便于安装于固定翼和旋翼无人机;组合导航系统,选用SPAN-IGM-S1 高精度MEMS 组合导航系统,该系统集成了挪威Sensonor 的高精度惯性测量单元STIM300 和NovAtel OEM7700 板卡。采用一体化封装,在不需要外接其他传感器的前提下,能为用户提供125 Hz 的高精度3D 位置、姿态和速度信息,同时集成高像素工业相机与系统控制模块,搭载于长航时多旋翼无人机,一次作业飞行时间能够达到30 min,能够采集得到平面位置、高程绝对精度优于5 cm 的激光点云数据。
1.2.2 测量内外业流程
无人机激光扫描进行地形测量的外业流程可分为:场地踏勘、航线规划、数据采集;数据处理包括:数据解算、点云去噪、点云滤波等;生成等高线的方法可分为数字高程模型(Digital Elevation Model,DEM)生成等高线法和点云抽稀后直接生成等高线方法等。测量流程如图2。

图2 无人机激光扫描测量流程
2 研究区概况
试验区域位于内蒙古鄂尔多斯市伊金霍洛旗石拉乌素煤矿,数据采集区域选择目前正在开采的北1 工作面地表,区域内植被覆盖多为干旱区针叶低矮植被和防风固沙林。试验区域如图3。外业数据采集前,首先要对测区进行航线规划,在电子地图上对测区范围进行任务标注,划定数据采集区域,在采集区域内进行航线规划。航线规划时,应首要考虑数据采集所要求的点云精度、密度,综合考虑无人机的性能、续航时间,确定无人机飞行的高度与重叠度。对于一次飞行不能完成采集任务的,需提前在电子地图上选择空旷、平整的场地作为中途起降点,中途起降点必须经过现场的踏勘,确保能够满足无人机起降的条件,才能进行中途电池的更换。在工作面上方使用机载激光扫描系统对地进行扫描测量,设置仿地飞行,飞行高度距地面100 m,水平飞行速度5 m/s,飞行作业时间大约25 min,相较于传统方式极大缩短了外业工作的时间,减轻了劳动负担[4]。
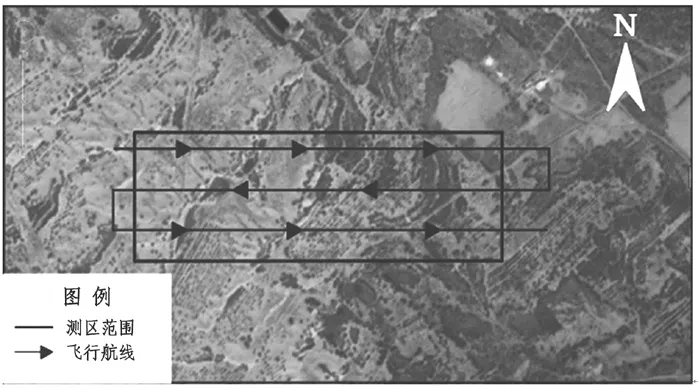
图3 试验区卫星影像
3 数据处理
3.1 点云去噪
由于目标的物理特性、空气环境中细微物质与仪器误差等因素的影响,机载激光雷达系统采集得到的原始点云中不可避免地存在少量的噪声点。这些噪声点一类是扫描仪发射的激光光束,缺失了目标的返回信息,由此导致的粗差点叫遗失点;另一类是系统误差和飞鸟飞虫导致的极低点和空中噪点统称为外露点。虽然这些干扰点在整个点云数据集合中占比较少,但因为多数点云滤波分类算法通常选择点云数据中的一定区域高程最低点作为初始地面点,如果选择的最低点为噪声点,则会对一定区域范围内的滤波效果造成严重影响。所以,为了使点云数据的滤波分类结果有更高的精度,在进行地面点分类前必须要将噪声点从整体点云数据中进行剔除。
3.2 渐进加密三角网滤波
渐进加密三角网滤波依据原始点云数据坡度将其格网化,寻找每个格网内最低点作为地面种子点构网,之后通过迭代逐层加密[5]。将格网内地面点云数据全部分类出来,是目前较为主流的地面点分类算法,其具体步骤如下:
1)将点云数据进行格网化,依据高程值对每个格网点云数据排序,遍历所有格网的点云数据,选择各格网中高程最低点作为起始的种子点;
2)对初始地面种子点进行构网;
3)遍历各格网未分类点,对各激光点投影到水平面所形成的三角形进行查询分析,计算未分类点与三角形之间距离,记为d,以及三角形各顶点与未分类点之间连线和三角形平面之间的夹角α1、α2、α3。如图4 所示,将待分类点和迭代的距离与角度进行对比,如果小于对应阈值,那么将待分类点归类于地面点中,将其加入三角网中。重复上述迭代直至所有未分类点分类完毕。

图4 渐进三角网加密算法原理
点云滤波效果如图5。如图5(a)所示,滤波前的点云除地面点以外,还包含了植被等各种无关数据,对真实地表形态的反映造成极大影响;滤波后的点云如图5(b)所示,植被等无关信息已经被滤除,有效地分离出地面点,还原了真实的地表形态。

图5 点云滤波效果对比图
4 等高线生成
4.1 DEM 生成等高线法
等高线测绘是地形测量的主要内容之一,等高线是地形图上地貌起伏表示的主要符号,等高线的生成是地形图测绘的重要工作之一。当点云数据经过滤波处理后,数据中建筑物、植被及其他地物特征得到滤除,但也导致获得的地面点云中存在一定的数据空洞。因此基于地面点云进行地表模型重建生成数字高程模型时,需对数据缺失区域采用插值算法进行修复生成契合原始地形起伏状态的DEM。本文采用克里金插值法构建DEM,通过DEM 生成的等高线效果如图6(a)。

图6 地形测量成果
4.2 点云直接生成等高线法
机载激光点云除了通过构建DEM生成等高线,还可以将滤波后的地面点云直接构建不规则三角网,在三角网中各三角形边上进行等高线点的确定、等高线点的追踪、等高线连接与等高线的光滑。但在此过程中,往往难以用到数量巨大的激光点数据,海量的点云数据不仅对于地形测量精度提升的空间有限,相反,还会造成计算机、绘图软件的卡慢,降低工作效率。故在进行地形测量前,常需要进行点云抽稀,在保证精度损失可控的前提下降低数据冗余度。本文选用基于曲率的点云抽稀算法:该算法通过计算点云表面的曲率作为抽稀判定的条件,在曲率大的区域减小抽稀倍数,曲率小的区域增大抽稀倍数,从而使整体抽稀倍数符合预设值。该算法可降低地形变化较大的复杂区域的抽稀率,增大地形平坦等简单区域的抽稀率,较好地顾及三维空间上的地形特征,能够在减少数据量的同时较好地保留地貌形态,对于沟坎,坡谷等特殊地形形态有较好保留效果。在CASS10.1 软件中将抽稀后的点云直接生成等高线效果如图6(b)。
5 精度评定
为了评定两种方式生成等高线的精度,在测区地表采用GNSS RTK 方法随机测取30 个高程点,将高程点展绘在地形图上,并分别在其原位置内插高程点,分别按中华人民共和国国家标准《数字测绘成果质量检查与验收》(GB/T 18316-2008)中计算两种方法生成等高线的高程中误差,见公式(1),检测点高程与计算结果见表1。

表1 等高线高程精度评定表
式中:Hi为检测点实测高程;hi为数字地形图上相应内插点高程;n为检测点高程个数。
由表1 可以看出,两种方式测得的等高线精度均能够满足高精度的大比例尺数字测图要求,这是由于无人机激光扫描测量方式相较于传统手段,其数据采样率高,故能生成更加精细的等高线以及地面模型,从而也能够证明无人机激光扫描技术能够测量得到高精度的地形信息。
6 结语
本文将机载激光雷达运用于矿区的地表地形测量中,通过内外业的测量、数据处理,分别使用两种方法生成矿区地表等高线,其作业效率是传统手段所不可比拟的,尤其是在地形复杂、环境恶劣的条件下,其优势更加突出,不仅减轻了地测人员的劳动负担,其测量的精度,也能够满足大比例尺测图精度要求,且激光扫描的测量成果更加丰富,对于煤矿生产的数字化、智能化进程提供了诸多便利。
猜你喜欢
当代陕西(2020年23期)2021-01-07 09:24:44
空间科学学报(2020年6期)2020-07-21 05:36:46
广东教学报·教育综合(2019年87期)2019-09-10 07:22:44
测绘通报(2019年1期)2019-02-15 04:56:06
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
地理教育(2016年10期)2016-11-09 00:32:53
江西理工大学学报(2015年3期)2015-12-22 05:26:18
全球定位系统(2015年4期)2015-02-28 12:38:13
浙江国土资源(2014年5期)2014-04-28 09:04:19
地质找矿论丛(2014年3期)2014-02-27 09:31:52
