增强罗兰系统差分技术研究
2023-09-09 07:13:40牛会丰李君一米正衡
现代导航 2023年4期
牛会丰,李君一,王 伟,米正衡
增强罗兰系统差分技术研究
牛会丰1,李君一2,3,王 伟2,3,米正衡2,3
(1 中国人民解放军92678部队;2 中国电子科技集团公司第二十研究所,西安 710068; 3 陕西省组合与智能导航重点实验室,西安 710068)
增强罗兰系统中,电波传播误差是影响定位/授时精度的主要因素。在分析罗兰C定位误差基础上,阐述了采用差分罗兰提高局部区域性能的基本原理及其系统组成,详细论述了差分修正量生成、基于罗兰数据通道(LDC)的差分电文发播、差分电文设计以及用户差分处理的技术实现途径,并通过试验验证了差分罗兰技术体制和性能提升效果,为增强罗兰系统工程应用奠定技术基础。
增强罗兰系统;差分罗兰;附加二次因子;罗兰数据通道
0 引言
罗兰C导航系统是一种陆基部署的大功率远程导航系统,具有可靠性高、不易被干扰的特点,在技术体制上与卫星导航系统(Global Navigation Satellite System,GNSS)完全不同,可作为后者的备份与补充,但同时也存在系统覆盖区域有限、定位/授时精度不高的问题。近十几年来,增强罗兰技术的开发应用,使其精度得到了极大的提高;差分技术是增强罗兰的核心技术之一,采用类似GNSS的差分技术手段,以提高罗兰C系统在局部区域(差分区域)用户定位授时精度[6];国外研究和试验表明,罗兰差分定位精度可以达到优于20 m[5],满足舰船进出港口要求。
我国的长波导航系统属于罗兰C技术体制,在系统覆盖的重点区域(如主要港口、航道、重要城市、机场和岛礁)可以通过建立差分系统,提高在重点区域的定位/授时精度,更好地发挥作为北斗备份与补充的作用。
1 罗兰C定位误差分析
罗兰C系统用户定位精度主要取决于系统同步误差、电波传播误差、用户接收机测量误差、定位几何因子等因素。目前系统同步误差和接收机测量误差可达到百纳秒以内,但是电波传播误差一般为几百纳秒至几微秒,这是制约用户定位精度的主要因素。
罗兰电波传播误差是指罗兰脉冲信号从发射天线到接收天线传播过程中产生的误差。其与传播路径陆地导电率、地形和气象气候等因素有关。通常用附加二次因子(Additional Secondary Factor,ASF)对电波传播误差进行修正[6]。
假设罗兰信号从发射台到接收点的传播时延为,则
ASF包括固定部分和随时间变化部分。固定部分是一个与空间位置相关的量,与传播路径上大地电导率、大气折射率和地形等因素有关,在ASF中占主要部分,最大可达到几微秒。通常将接收区域划分为网格,事先通过模型计算和实际测量相结合的方式得到每一网格的ASF标称值,并将ASF格网数据(ASF地图数据库)保存在用户接收机中。变化部分是一个与时间相关的量,与传播路径上气候和气象有关,随季节变更、昼夜交替、温度湿度变化而不同,在ASF中占次要部分,最大可达到几百纳秒。变化部分可以通过建立差分系统,实时生成、发播给用户。
2 差分罗兰工作原理及系统组成
罗兰信号在传播过程中,传播时延变化量在局部区域内具有一定的相关性,通过建立差分基准站,实时监测罗兰信号传播时延的变化,并将变化量(差分修正量)播发给差分区域内的罗兰用户,用户利用差分修正量对到达时间(Time of Arrival,TOA)或时差(Time Difference,TD)测量值进行修正,减小系统同步、电波传播等因素对授时和定位结果的影响。根据差分信息的内容,差分罗兰可以分为TD差分和TOA差分两种模式,在增强罗兰系统中,TOA差分模式已成为技术发展趋势,以下主要描述基于TOA模式的差分系统设计。
罗兰差分系统主要由罗兰差分(基准)站、通信链路、罗兰发射台和罗兰用户设备等部分组成,如图1所示。
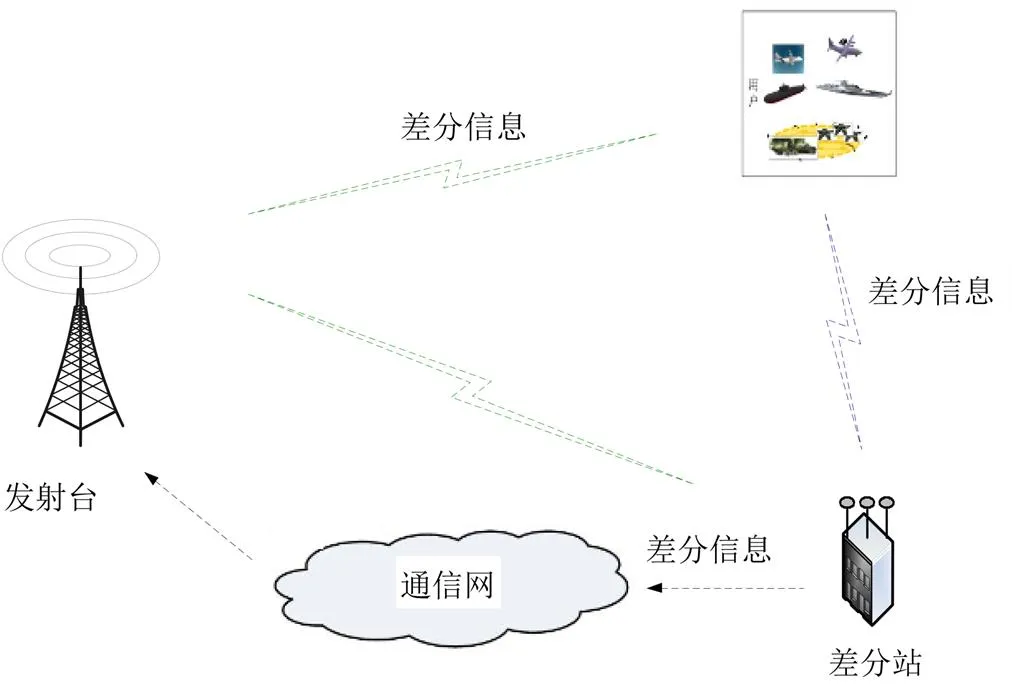
图1 罗兰差分系统基本组成
罗兰差分站实时接收、处理罗兰信号,生成罗兰差分信息,并利用通信链路将差分信息传输到罗兰发射台。差分站主要设备包括罗兰C授时监测接收机、时间基准设备(GNSS接收机)、原子钟(铷钟)、计数器、差分生成设备和通信链路终端等。
罗兰发射台实时获取来自差分站的差分信息,由编码形成设备对实时差分修正量进行处理和编码,生成差分电文,将电文调制到罗兰信号上广播给用户。罗兰发射台新增设备主要包括通信链路终端、处理差分信息的编码形成设备等。
罗兰用户设备在差分工作区实时接收罗兰信号,解调解码差分信息,利用差分信息对测量数据进行实时修正,解算出时间、位置信息。与传统罗兰用户设备相比,罗兰差分用户设备增加了罗兰信号的差分信息解调解码和差分修正处理功能。
3 差分修正量生成
罗兰C授时监测接收机接收罗兰信号,输出罗兰钟面时间和秒信号(1 Pulse Per Second,1PPS);时间基准设备提供协调世界时(Coordinate Universal Time,UTC)时间和1 PPS,并通过驯服铷钟提供基准1PPS;计数器测量罗兰1PPS与基准1PPS的偏差,该偏差为信号从发射台到差分站电波传播修正的ASF测量值;差分生成设备根据ASF实时测量值和事先确定的ASF标称值,采用合适的算法模型预测差分修正量,差分修正量综合反映了罗兰发射、电波传播的变化。差分修正量生成原理如图2所示。
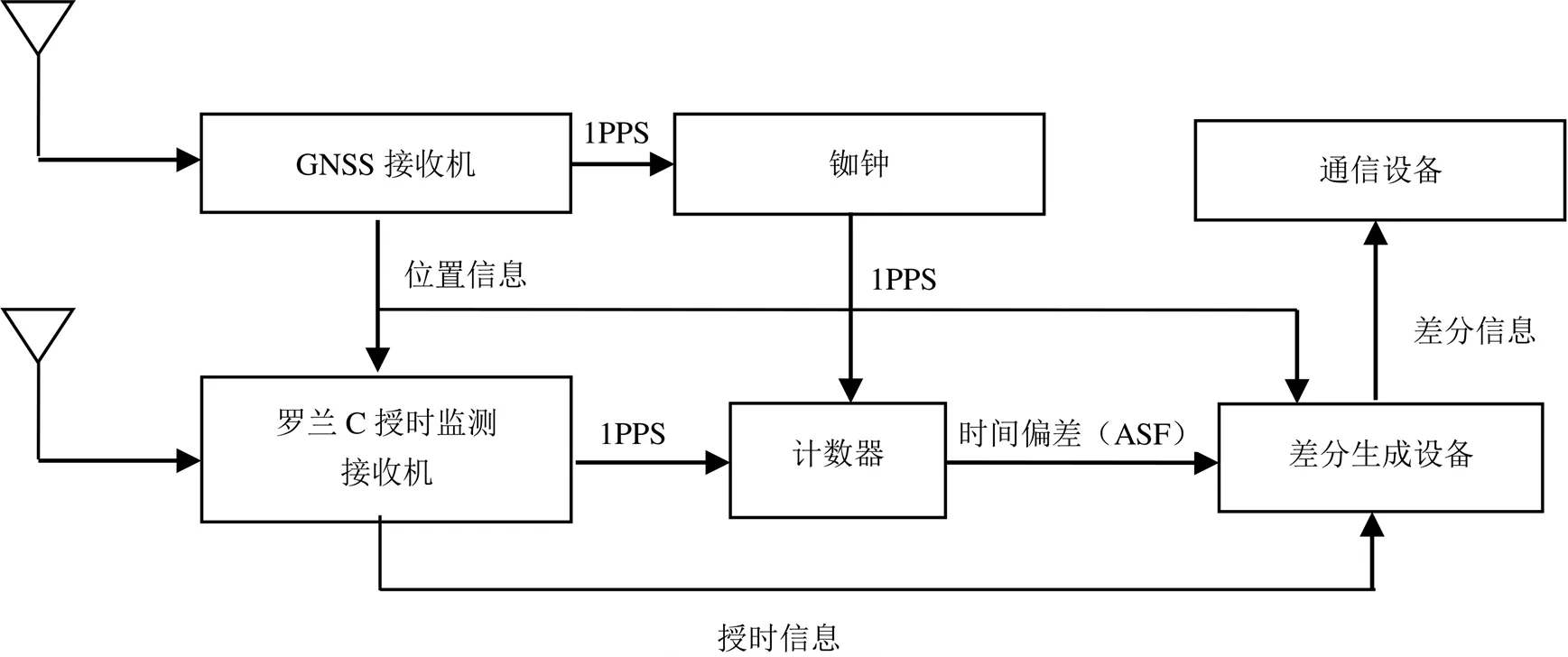
图2 差分修正量生成原理图
差分修正量测量值X=ASF测量值-ASF标称值,对测量数据进行异常数据剔除处理后,可以采用以下几种方法之一预测差分修正量:
1)滑动平均法
以最新个采样值的平均值作为第+1个数据点的预测值,如式(2)所示
式中:X为采样值;Y为预测值;为滑动窗口宽度。
2)一阶低通滤波法[3]
对本次采样值与上次滤波输出值进行加权,得到本次滤波输出值,如式(3)所示

式中:为滤波系数;()为本次采样值;(1)为上次滤波输出值;()为本次滤波输出值。
3)多元线性回归[2]
4 差分电文发播
差分电文广播给用户主要有无线通信电台广播、公共信息网发布和罗兰数据通道(Loran Data Channel,LDC)发播等多种方式。
无线通信电台广播方式是在差分基准站通过无线发播电台或无线电发射台,例如无线电指向标(Radio Beacon Navigation,RBN)发射台,广播差分信息,用户通过接收电台或专门的接收设备获取差分信息。
公共信息网发布方式是在公共信息网上建立专用差分信息服务网站,差分站将实时差分信息发送给网站,通过网站发布,用户利用公共信息网获取差分信息。这种方式比较适合具备公共信息网条件下的定点授时用户。
罗兰数据通道发播是目前国际上差分罗兰主要采用的工作方式,它建立在罗兰发射系统基础上,首先差分站利用网络将差分信息从监测站传送到罗兰发射台,然后通过对罗兰脉冲信号的附加调制,将差分电文加载到信号上进行广播。用户接收罗兰脉冲信号,对调制信号进行解调、解码,获取差分信息。罗兰数据通道按调制类型可以分为脉冲位置调制(Pulse Position Modulation,PPM)和脉冲内频率调制(Intrapulse Frequency Modulation,IFM)[7]。目前,通常采用PPM,其中具有代表性的是欧洲的Eurofix方式和美国的第9脉冲方式。
4.1 Eurofix方式
在Eurofix方式中,对每个罗兰脉冲组的后六个脉冲进行调制(移动),前两个脉冲不调制。每个脉冲调制分为三种状态(前移1 μs,不移,后移1 μs),每个调制脉冲组可以表示729种状态。选择出便于解调的128个状态作为罗兰调制图样。对于128个罗兰调制图样,每个脉冲组可传输7位二进制信息[9]。Eurofix调制如图3所示。
4.2 第9脉冲方式
第9脉冲调制是在罗兰C的8个导航脉冲组之后,增加第9脉冲,并与标准脉冲位置在时间上作一个延迟移动,根据延迟的时间长度,来代表不同的字符。
在第9脉冲上,改变相对零字符偏移的脉冲延迟时间,调制图样移动包络3次,建立4态包络位置,并与8态相位变化一起得到全部32态PPM。32态图样的时域图如图4所示。
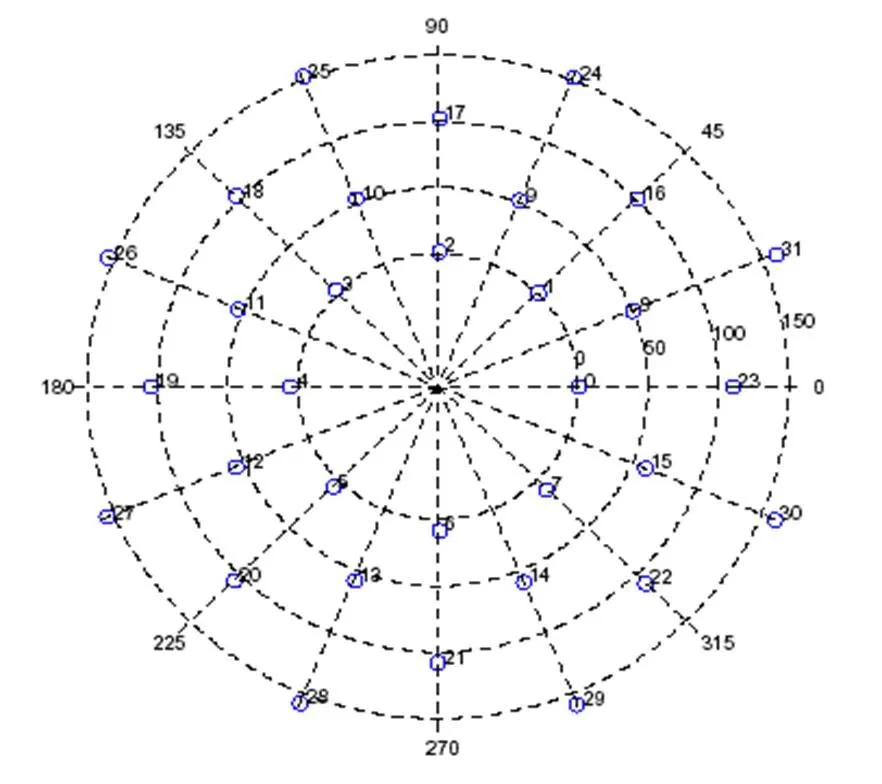
图4 32个符号的空间分布
在这种工作模式上,每个脉冲组重复间隔(Group Repetition Interval,GRI)的数据传送率是5比特[8]。
5 差分电文设计
差分电文信息通过LDC广播给用户,用户根据差分电文的格式,从罗兰信号中获得差分信息。
罗兰差分电文采用国际建议标准进行设计,首先为了能够抗多型干扰,要具备单向检错纠错能力,其次为了便于用户快速正确解码电文,要具备一定的帧同步能力,还要具有兼容性,能够兼顾授时和差分需要。
5.1 编码类型
选择编码类型要考虑这样几个方面:一是传送信息特点;二是信道误码特点和误码水平;三是工程设计和工程实现的难易程度。
罗兰C信道误码是混合型的,有随机错误,也有突发性错误。对于随机干扰造成的误码,取每个GRI信道误码率为2%作为设计条件,对于交叉干扰造成的突发性错误,根据我国罗兰C台站的位置、发射功率、信号重复周期、邻近国外罗兰C台站的位置、发射功率和信号重复周期等情况分析,不高于6.2%。根据上述情况,选用线性分组循环码。
循环冗余校验(Cyclic Redundancy Check,CRC)码是一类重要的线性分组码,编码和解码方法简单,检错能力强[4],在数据通信领域应用非常广泛。里所(Reed-Solomon,RS)码是由Reed和Solomon两人构造出来的多进制码,具有很好的抗随机错误和突发错误的能力[1],非常适用于罗兰C信道编码。
Eurofix编码方式采用级连码,选择CRC14码作为级连码的内码,RS(127,107)码作为外码,其中RS码采用缩短的RS(30,10)码;第9脉冲编码方式采用RS(31,16)码,缩短后为RS(24,9)。
5.2 电文内容
差分电文包括电文类型、差分站代号、发射台号和差分修正量等信息项;为了更新用户的差分站基本信息,适应差分站的扩充、修改,还应包括差分站位置和ASF标称值等其他历书信息项。
在Eurofix罗兰差分电文中,差分电文由信息项、CRC码和RS码三部分构成。每个差分电文发播占用连续30个罗兰脉冲组,即需要30个GRI时间传输一帧电文[9]。在第9脉冲罗兰差分电文中,差分电文由信息项和RS码两部分构成。每个差分电文发播占用连续24个罗兰脉冲组,即需要24个GRI时间传输一帧电文[10]。
6 用户差分处理
差分罗兰用户接收机是在传统罗兰导航授时基础上,增加接收和处理罗兰差分信息、差分定位解算和差分授时功能。差分罗兰用户接收机工作原理如图5所示。
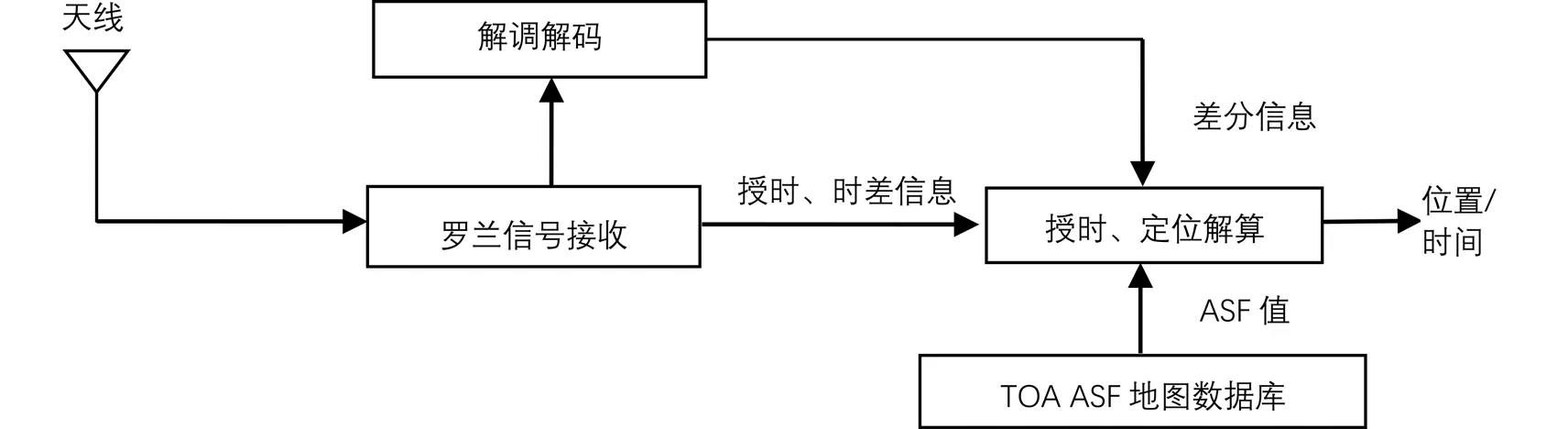
图5 差分罗兰用户接收机工作原理
用户首先通过接收机内的ASF地图数据库,提取标称ASF值,然后通过接收差分信息得到差分修正量,利用ASF标称值和差分修正量,实时对测量数据进行修正,减少电波传播等因素对用户定位、授时带来的误差。
7 差分试验验证情况
在沿海地区先后建立了2个差分罗兰基准站,分别开展了差分定位和差分授时性能测试验证工作,具体试验情况如下所述:
1)在天津上古林RBN台站建立差分罗兰基准站,实时接收某台链罗兰C信号,生成差分信息,按照海事无线电技术委员会(Radio Technology Committee of Marine,RTCM)10 402.4规定的电文格式,通过RBN发播台进行播发,罗兰用户接收机通过RBN接收设备获得差分信息,开展海上增强罗兰差分定位试验。
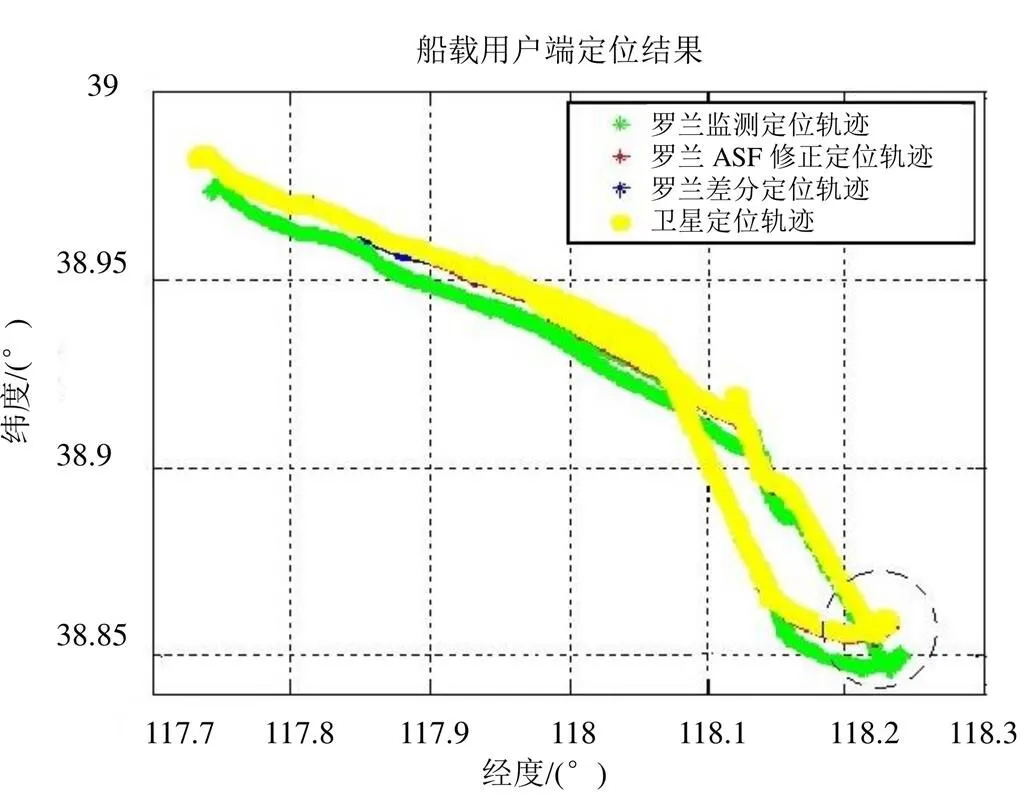
图6 差分试验航迹
航行轨迹如图6所示,从天津港南疆码头出发至距离差分站63 km,海上行驶约38 km,作业完成后返回至南疆码头。罗兰接收机原始时差定位精度为760 m;经过差分修正后定位精度为45 m;圆形虚线区域放大显示如图7所示。
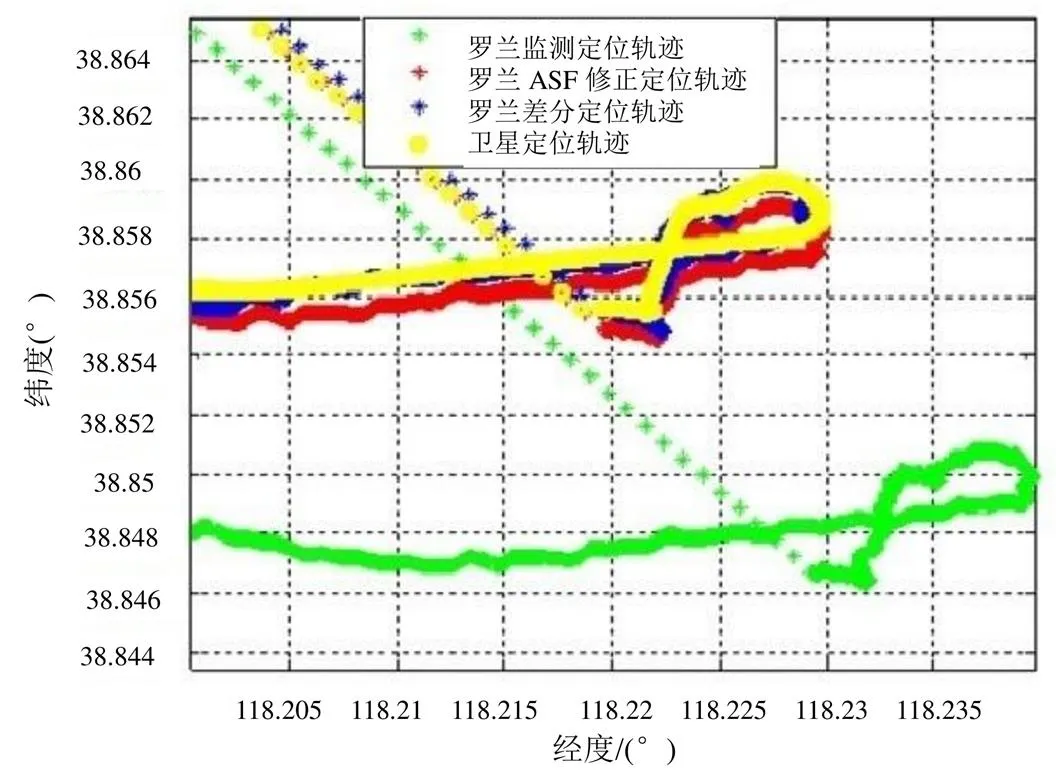
图7 部分航迹(距差分站约60 km)
2)在广东某地建立差分罗兰基准站,实时接收南海台链罗兰C信号,生成差分信息,通过罗兰数据通道,以Eurofix方式发播差分信息,罗兰用户授时接收机通过对接收的罗兰信号进行解调、解码获得差分信息,开展罗兰差分授时试验。
罗兰用户授时接收机接收某台链的三个授时台信号,原始输出的1PPS与基准1PPS(北斗)的时间偏差如图8所示。罗兰用户授时接收机进行差分修正后,输出的1PPS与基准1PPS(北斗)的时间偏差如图9所示。根据时间偏差数据分别计算原始授时精度与差分授时精度,结果如表1所示。
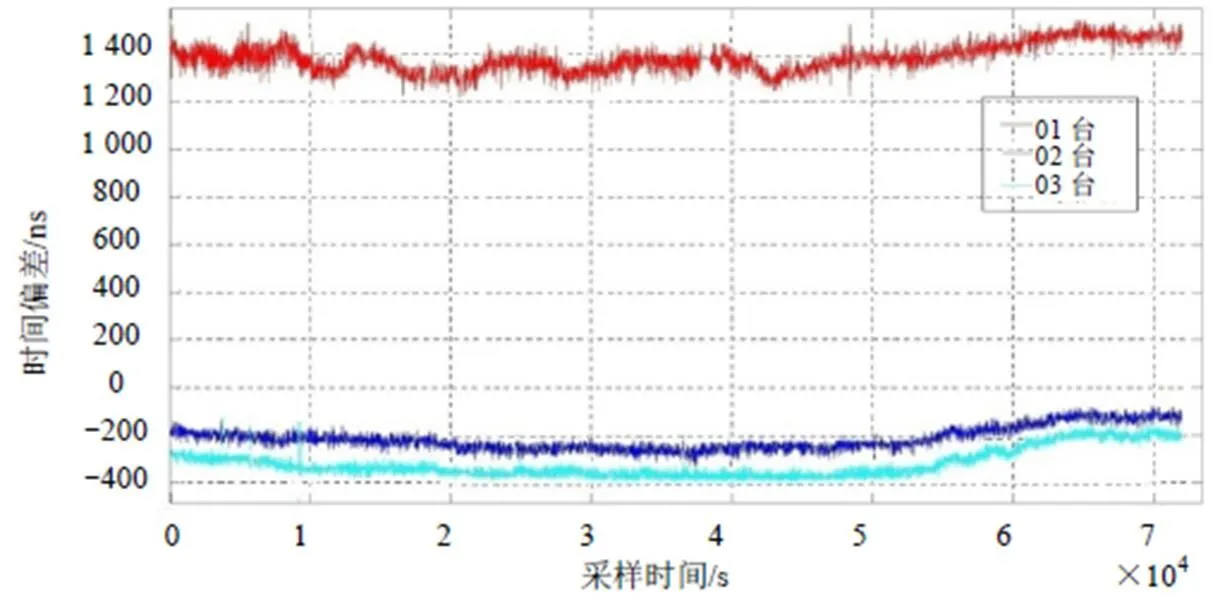
图8 原始时间偏差
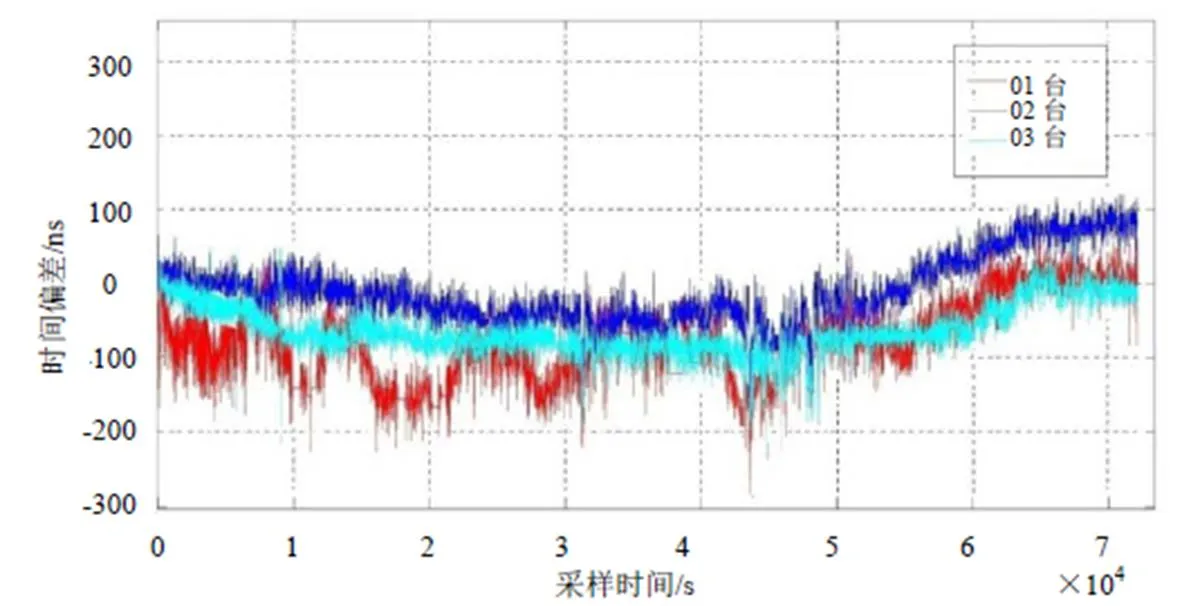
图9 差分修正后时间偏差

表1 授时精度(单位:ns)
8 结语
在增强罗兰系统的重点服务区域,建立差分基准站,可提供高精度导航授时服务,用户定位精度可从现有的百米至千米级提升到几米至数十米,授时精度可从现有的数百纳秒至微秒级提升到百纳秒,对长波系统的军民应用具有重要的意义。
[1] 王新梅,肖国镇. 纠错码——原理与方法[M]. 西安:西安电子科技大学出版社,2001.
[2] 杨致友. 罗兰导航数学方法[M]. 西安:西北工业大学出版社,1991.
[3] 迈迪. 长河二号工程——远程无线电导航系统[M]. 北京:电子工业出版社,1993.
[4] 张会生,张捷,李立欣. 通信原理[M]. 北京:高等教育出版社,2010.
[5] FERNS COUNCIL CS25/5/2 25th Session,eLoran_Testbed_Implementation_in_Korea[C]. 2016.
[6] A. Helwig,G. Offermans,C. Stout,et al. eLoran system Definition and Signal Specification Tutorial[C]. International Loran Association (ILA-40)2011.
[7] SHERMAN C. LO,BENJAMIN B. PETERSON,et al. Loran Data Modulation:A Primer [J]. IEEE A&E SYSTEMS MAGAZINE,2007,22(9).
[8] SHERMAN C. LO,BENJAMIN B. PETERSON,et al. Loran Data Modulation:Extensions and Examples[J]. IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS,2007,43(2).
[9] Transmitted Enhanced Loran(eLoran)Signal Standard for Tri-State Pulse Position Modulation[S]. SAE International,2018,9.
[10] Transmitted Enhanced Loran(eLoran)Signal Standard for 9th Pulse Modulation[S]. SAE International,2018,9.
Research on Differential Technology of Enhanced Loran System
NIU Huifeng, LI Junyi, WANG Wei, MI Zhengheng
Radio wave propagation error is the main factor affecting positioning and timing accuracy of the enhanced loran system. Based on the analysis of Loran-C positioning error, the basic principle and system composition of using differential loran is proposed to improve the local domain performance, the realization approach of differential correction generation, differential message transmission based on Loran Data Channel (LDC), differential message design and user differential processing are discussed in detail, and the differential loran technique system and performance improvement effect through experiments are validated. It lays a technical foundation for the engineering application of enhanced loran system.
Enhanced Loran System; Differential Loran; Additional Secondary Factor; Loran Data Channel
TN96
A
1674-7976-(2023)-04-264-06
2023-06-01。
牛会丰(1979.11—),河北昌黎人,硕士,高级工程师,主要研究方向为长波无线电导航系统建设管理。
猜你喜欢
绿色包装(2022年11期)2023-01-09 11:23:28
电子与信息学报(2021年2期)2021-03-17 09:45:42
文苑(2020年10期)2020-11-07 03:15:40
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
法国研究(2016年3期)2016-05-17 03:56:41
课堂内外(小学版)(2015年6期)2015-09-10 07:22:44
导航定位学报(2015年2期)2015-06-05 09:27:31