无人船结合RTK 技术进行无验潮水深调查数据的应用
2023-09-08 01:44禹云亮王悦霖杨立平
中国水运 2023年8期
禹云亮,王悦霖,杨立平
(1.中山市海洋与地质环境监测站,广东 中山 528400;2.广州华海星技术公司,广东 广州 528400;3.东莞市海域使用动态监视监测中心,广东 东莞 523000)
1 引言
我国入海河口海域受上游河流和海洋洋流的综合作用,水流方向变化复杂,形成的水下地形也复杂,传统的水下调查手段,对施测水面宽度、深度、水流、天气有一定的要求。随着无人船技术的发展,稳定性和抗干扰性能越来越高,可以避免上述问题。本项目结合无人船载系统与RTK 进行无验潮水深数据调查,验证该技术的可行性和有效性。
2 相关技术原理
2.1 基本原理
2.1.1 RTK 原理
RTK(real time kinematic)是以载波相位观测值进行实时动态相对定位的技术。其原理是将位于基准站上的GPS 接收机观测的卫星数据,通过数据通信链实时发送给移动站GPS 接收机。移动站GPS 接收机接收 卫星数据,同时接收来自基准站的信号,通过对所收到的信号进行实时处理,实时计算出点位中误差、三维坐标值,时间刷新率在0.1 秒即可快速实时的获取到5 厘米精度以内的一个点的平面和高程数据。RTK 技术广泛应用于我国基础地形数据采集、工程施工定位、海洋调查等领域。
2.1.2 回声测深原理
将超声波在水中的传播速度v 作为已知恒速,换能器基线看作零,通过测量超声波往返水底的时间t 计算水深z,z=v*t/2。由于水底的变化相对比较平缓,两次测深之间(约0.1 秒)水深变化不会太大,假定二次深度的变化量为±10%,正确回波时刻前 10%×z 到后 10%×z 开一道时间门,只有在时间门内的回波认为是正确的回波,±10%就叫时间门宽度,如果该时间门内没有回波,就逐渐扩大时间门直至全程搜索回波,重新捕获正确的回波。

图1 测深仪工作原理图
2.1.3 无人船集成平台
无人船集成平台包括无人船及动力系统,集成数据采集系统(RTK 定位系统、单波束测量系统)、通讯系统(通讯基站、通讯移动端)、控制系统(岸基控制、中控系统)等,通过控制系统控制船体按照规定航线航速自主或者遥控辅助前行。
无人船作为水上航行动力载体,船体设计需要考虑材料的碰撞、防腐蚀以及可达到较高的抗风浪等级,确保在3 级~5 级风浪条件下能够安全平稳航行。数据采集系统主要是采集水深数据和对应的定位数据,定位数据采用RTK 定位系统,实现实时定位和导航功能,水深数据采用单波束测量系统。通讯系统通过电台和4G通讯方式实现控制系统的信息通讯。控制系统负责控制岸基控制单元和中控系统,实现船上各类传感器数据监控,以供岸上人员实时掌握船体状态和测量数据,及时发现错误信息,调整航行轨迹和仪器设置。

图2 无人船系统组成图
2.2 无验潮水深数据获取原理
无验潮水深数据获取原理就是通过RTK 系统实时获得水面点精度高而且可靠的平面数据(X,Y)和高程数据(H),结合RTK 天线到换能器高(h1)、单波束测量系统获取到的水深数据(h2)和高程基准面与深度基准面的差值(h3),通过高程值传递到水底,计算出水底点平面数据(X,Y)和基于水深深度基准面的水深数据(H-h1-h2+h3)。如图3 所示。

图3 无人船RTK 无验潮作业模式图
3 实验区概况及数据生产
3.1 试验区概况及仪器参数
此次通过无人船结合RTK 技术进行无验潮水深调查数据的实验区域为烟台辛安河入海口海域。平面坐标采用CGCS2000 国家大地坐标系,高斯-克吕格投影,3°标准分带,中央子午线120°。高程基准为1985 国家高程基准。测线布设间距为200m,主测线方向垂直于等深线,检查线垂直于主测线,检查线不少于主测线长度的 5%。RTK 系统采用中海达测绘仪器有限公司生产的A12 RTK 测量系统(定位精度平面:±10mm+1ppm、高程精度:±15mm+1ppm)进行水上定位。无人船平台采用青岛中海基业海洋科技有限公司生产的SBOAT1200 无人船系统(自动驾驶系统内置9 轴惯导传感器、自动航行控制器,数据压缩预处理模块,外接RTK 接口,使用RTK 数据进行高精度厘米级导航)。单波束测量系统搭载南京元厚电气有限公司生产的无人船专用HXF160 单频测深仪(测深精度为±10mm+0.1%H,H 为实时水深值,频率为455KHz,测量范围为:0.15m—50m)。平面坐标转换采用定制开发的GToG 软件进行解算。水深数据处理通过SONAR VIEWER 数据处理软件完成。
3.2 数据生产
数据生产主要环节包括生产准备、数据采集、数据处理、成果输出。生产准备包括调查区域的航线设置、无人船平台检查、回波测深仪的声速、吃水、增益等参数设置、平面和高程参数的解算、坐标校正。数据采集包括RTK 定位数据和单波束测量系统水深数据采集。数据处理包括定位数据的处理、水深基准面的调整和水深数据的处理。成果输出主要数据格式的转换,生产流程图如图4。

图4 生产流程图
数据生产的重要环节在数据处理。定位数据的处理主要是平面坐标系统转换以及对RTK 获取的三维数据质量可靠性处理。试验区面积不大水深基准面的调整通过固定值修正处理。水深数据的处理包括回波数据的质量判断及处理、数据重采样、水深值的基准面修正。调查范围内的水界质、水深深度和地形变化相对稳定,获取到的回波数据只有少量不能正常反应水下实际情况的值,通过水深数据的回放,根据时间和相邻水深数据进行判断处理。数据重采样主要是根据规范和实际需要,内业重新选取一定空间距离的水深数据。水深值的基准面修正采用固定差值改正。
本次水深数据调查完成测线总里程22.87km,测区水域总面积1.8 平方公里,重采样后获取水深调查点位数据1269 个。部分水深数据分布图如图5。

图5 水深数据分布图
3.3 数据精度分析
提取主测线和检查线平面位置吻合比较好的调查数据进行水深数据对比分析,同精度下最大的2 倍中误差为0.11m,符合海道测量极限误差0.3m 的精度要求,具体精度分析表如表1 所示。
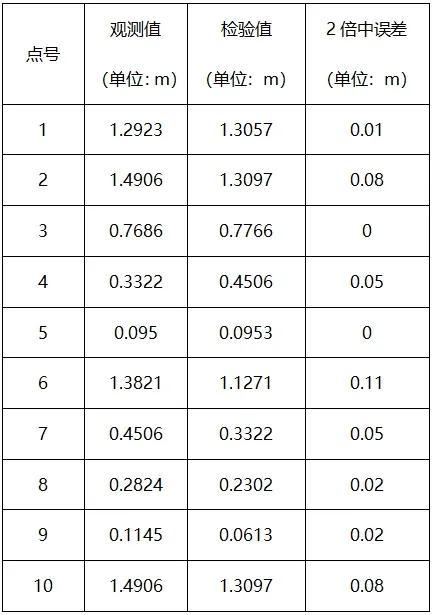
表1 精度分析表
4 结论及建议
无人船平台系统结合RTK 进行无验潮对入海河口海域进行水深数据采集提高了工作效率、降低了人员作业安全风险。最终的数据质量说明无人船平台系统结合RTK 进行无验潮进行水深数据获取符合水深数据调查的要求。
根据项目总结,进行数据采集时,为了提高调查数据的精度,波浪大小对最终数据的精度有一定影响,船的横摇、纵摇不宜过大。作业期间选择风浪小的时间段进行施测。航速不能太快,2.5m/s 左右的航速比较合适。
猜你喜欢
河北水利(2022年10期)2022-12-29
海洋通报(2022年4期)2022-10-10
当代陕西(2020年23期)2021-01-07
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
浙江国土资源(2015年4期)2015-05-09
全球定位系统(2015年4期)2015-02-28