
应用于野战医疗方舱转运AGV 的导航定位技术研究现状
2023-09-05 09:28:42曲鹏涛徐新喜刘培朋赵秀国
医疗卫生装备 2023年7期
曲鹏涛,苏 琛,吴 航,徐新喜,高 升,刘培朋,赵秀国,邢 楠
(军事科学院系统工程研究院,天津300161)
0 引言
野战医疗方舱是实现战场、自然灾害中伤员紧急救治的重要装备[1]。方舱部署速度直接影响战现场伤病员的救治效果,而方舱转运自动导引车(automated guided vehicle,AGV)可快速转运方舱,实现快速部署。AGV 是一种广泛应用于搬运行业的高度自动化、集成化的自主移动式机器人,因其身形类似汽车,故而被称为自动导引车。常见的AGV 均属于小型AGV,主要应用于柔性生产线以及自动仓储物流等领域[2-3],物流AGV 实物图如图1 所示。重载AGV 目前大量应用于港口码头、车站、机场以及大型加工厂,在运输大型装备、物资、大体积零配件等方面具有天然优势。青岛港执行任务的重载AGV 如图2 所示[4]。

图1 物流AGV[2]

图2 重载AGV[4]
方舱转运AGV 属于重载AGV 的一种,整个系统由导航系统、控制系统、驱动系统以及执行系统组成。不同于执行常规任务的重载AGV,方舱转运AGV需要适应不同野战医疗方舱转运阶段的场景变化。传统的重载AGV 作业时所承载的物料、装备均是由叉车、吊车、货车等人力进行装卸,存在安全隐患以及效率低下、技术单一的问题。而方舱转运AGV 用于转运野战医疗方舱,需自主实现装卸,其转运方舱的过程分为接近方舱阶段、承载方舱阶段、转运方舱阶段,在不同阶段导航定位方式有所不同,这就决定了方舱转运AGV 需要集成多种导航定位技术以实现方舱安全、高效转运。
本文将系统分析适用于方舱转运AGV 的导航定位技术的国内外研究现状,对目前导航技术的特点进行分析,提出适用于方舱转运AGV 的导航定位技术,并对其未来发展趋势进行展望。
1 AGV 导航定位技术
导航定位技术作为AGV 系统的关键技术,为AGV 实现自助导航、路径规划等功能提供了重要手段。鉴于AGV 面临的工作场景多样、任务难易程度不同,通常采用不同的导航技术以实现自身导航,有效提升其工作效率。当前,AGV 的导航定位技术主要包括磁导航与电磁导航技术、卫星导航技术、激光导航技术和视觉导航技术等。
1.1 磁导航与电磁导航技术
磁导航与电磁导航技术是指依靠AGV 携带的电磁感应设备,与磁带、磁钉或者电磁线周围的磁场进行相互作用的导航技术。例如,田应仲等[5]设计了一种安装于托盘AGV 前方底部的磁传感器,对地面铺设的磁条进行多个采样,并结合射频识别(radio frequency identification,RFID)系统,读取标签卡中预存储的相应地址与相应动作,完成AGV 的前进、后退、转向动作。张力等[6]同样应用RFID 定位结合磁带导引的方式,实现AGV 在仓储室内进行定点搬运。以上研究都是基于RFID 读卡器与磁传感器的结合,前者实现了路径点的转弯、转向功能,后者实现了路径跟踪功能,能够使AGV 在仓储工厂稳定运行。但存在的缺点是只有一台AGV 进行工作,效率较低,因为磁导航与电磁导航技术铺设的路径固定且单一,实现多种AGV 调度较为困难。且室外大规模铺设导致维修成本高、路径单一、适应性差,不利于重载AGV 在室外长时间、远距离运输。除利用单一磁传感器进行导航外,越来越多的研究者专注于采取鲁棒性更好的导航方式,比如磁传感器与惯性传感器联合进行导航[7-8],该方法的优点是惯性传感器可以为磁传感器提供精确的位置纠偏数据,能够保证依据磁导航的AGV 以更快的响应速度恢复到允许行驶路径的误差之内,但仍存在长时间累积的误差漂移。此外,有些研究者针对磁传感器提供的易于计算的位置偏差量进行控制调整,以期进一步改善简单环境下单一磁导航定位精度差的问题,目前主要有比例-积分-微分(proportional-integral-derivative,PID)控制以及基于PID 控制的演变算法进行位置偏移量和偏移率的控制[9-10],这些方法在环境简单的工厂内部具有良好的定位导航效果。
1.2 卫星导航技术
全球导航卫星系统(global navigation satellite system,GNSS)主要分为美国全球定位系统、中国北斗星导航系统、俄罗斯全球导航卫星系统、欧洲伽利略系统[11]。在过去一段时间应用范围最广、覆盖范围最大的是全球定位系统(global position system,GPS)。Yadav 等[12]将GPS 作为AGV 在室外运行的唯一传感器,并自主开发了可用于定位与跟踪航向的Arduino IDE 软件系统,但其设计的单一系统在很多情形下对AGV 定位与航向的判断存在较大误差。通常情况下,在使用单一卫星接收机时,该误差是必然存在的,例如单一接收机无法消除卫星存在的卫星星历误差、信号传播误差。而多种公共来源误差可以借助差分GPS(differential global position system,DGPS)手段进行消除,或者耦合多种传感器进行改善。目前,常用的DGPS 手段是载波相位差分技术,亦称为实时动态(real time kinematic,RTK)载波相位差分技术,是一种不需要事后解算就能在野外实时获取高精度定位数据的测量方法。例如,曹西京等[13]分析了单一卫星接收机定位精度低、受干扰严重的缺陷,设计了GPS 与航迹推测(dead reckoning,DR)相结合的导航定位系统,采用卡尔曼滤波算法完成对多传感器数据的融合处理与误差估计,提升了导航定位系统的精确度与平稳性。
Takasu 等[14]基于差分定位技术设计了一组低成本的RTK 方案,解决了卫星定位存在整周模糊度的问题,并开源了基于载波定位的程序算法包RTKLIB,为RTK 方案的进一步应用提供了很大的技术支持。Higuchi 等[15]同样通过RTK 技术,设计了浮点RTK方案,提升了定位精确度并降低了定位失败比例。除差分定位技术外,卫星系统与其他内部传感器耦合定位解决方案也发挥着巨大作用。Liu 等[16]提出了一种GPS 与里程计数据耦合的方法,使用基于贝叶斯的容积卡尔曼滤波器(cubature Kalman filter,CKF)形成分布策略,将车辆运行的轨迹约束引入特定的粒子滤波解决方案中。该方法相比传统CKF 方法能够精确估计车辆的纬度位置,但对于水平经度位置仍存在不可消除的误差。而提高RTK 技术的卫星定位精度方法是将GPS 与其他传感器相耦合,以降低单一传感器的估计误差。Takahashi 等[17]改变了不同卫星接收机使用时的信噪比,并在单频RTK-GNSS 定位中融入惯性导航系统,改善了RTK-GNSS 模糊解的计算性能,提高了GNSS 的定位准确性。Kubo 等[18]同样采用惯性测量单元改善RTK-GNSS 的定位质量,将惯性测量单元、多普勒测量速度传感器以及RTK-GNSS 信息通过CKF 进行融合,惯性测量单元和传感器能够在无卫星信号时提供定位功能,并在卫星信号恢复时对前者数据进行矫正[19]。此外,惯性测量单元的存在还可以消除城市环境下多路径因素对卫星导航设备的固有影响。
1.3 激光导航技术
目前运用激光传感器进行AGV 导航定位的技术大致有2 种。一种是基于反射板通过三角几何原理计算的激光定位技术,另外一种是无标志物辅助的激光同时定位与建图(simultaneous localization and mapping,SLAM)技术。例如,在机车检修基地等场景下发挥运输作用的激光导引AGV[20]、运输大型钢圈设备的重载AGV[21],都是通过空间反射板反射激光的原理进行空间避障。张妮娜[22]提出的国内首台激光叉车型AGV 同样利用激光三角定位原理对自身定位。激光定位技术不仅能够确定AGV 的自身位置,还可以对环境中的特殊点进行相应的定位。例如张悦悦[23]设计的系统利用激光检测反光板计算AGV的位置,并通过切换模式储存已扫描的反光板位置,进而生成带有AGV 位置的反光板布局地图,以便后续导航规划、定位使用。石林炜[24]设计的以激光为导航手段的叉车型AGV 同样采用该方法对AGV 与反射板进行建图,不同之处是其建立的地图属于高精度二维数字地图,但需要事先对工作区域环境进行仔细、精密的地图绘制,保证AGV 工作角落没有任何盲区。唯一不足之处是这种结合先验地图与激光反射板定位的方法需要在前期做大量的精细地图绘制工作。针对此问题,王翔[25]提出了RFID 与激光雷达技术相结合的定位方法,利用RFID 可以快速获得远距离物体及周围环境的准确位置信息,弥补了激光雷达识别性差的缺陷,同时实现了AGV 自身传感器的一次测量和多次回环检测时的定位矫正。这2种技术的结合能够快速定位AGV,并准确获知其周围特定物体、指定场景的空间位置,能够快速、可靠地建立AGV 与周围环境的地图信息。
上述基于三角定位原理的激光定位方法在室内场景具有定位精度高、鲁棒性好等优点,但过分地依赖于反射板的存在以及地图的预先建立,存在路径更改烦琐、抗干扰能力差、成本高的缺点。为解决上述问题,激光SLAM 得以发展和应用。激光SLAM 方法的提出主要解决了未知地图的问题,并同时可提供定位功能。阳樊等[26]提出一种把局部点云地图与全局优化地图相匹配的激光SLAM 方法,解决了传统激光定位自主性差的问题,该方法不依靠任何标志物,可实现对AGV 位置的精确矫正定位。但该方法局限于高度结构化的仓储场景假设,且忽略了AGV 行驶过程中的高精度定位需求。鲁海宁等[27]进一步解决了此问题,提出了激光SLAM 结合惯性传感器的耦合导航技术。AGV 借助惯性元件(通常是加速度计)进行全局定位,并通过激光SLAM 对惯性漂移定位进行局部矫正,能够进一步提高局部和全局定位精度。激光SLAM 技术的应用提高了AGV 的自主性和环境适应性,而不需要铺设任何辅助标志物,且路线更改方便、维护工作少。但不论哪种激光导航方式,皆存在不足之处,如激光传感器对吸光材料敏感、易受直射光线干扰且成本昂贵,这些问题直到视觉导航技术的出现才逐步得以解决[28]。
1.4 视觉导航技术
根据捕获引导方式的不同,目前有2 种视觉导航技术:一种是基于标志物导引的导航方案,称为光学导引技术,常见的标志物有色带、二维码图案;另一种是不借助任何外部标志物,通过处理相机图像在线构建环境并计算自身位置的方案,称为视觉同步定位与建图(visual simultaneous localization and mapping,VSLAM)技术。
光学导引技术在过去有着较为成熟的发展,特别体现在二维码图案的相关检测与识别技术。Ang等[29]针对工厂内部AGV 只能提取地面标志物的缺点,提出了可识别随机位置二维码图案以及计算二维码相对距离与角度的定位方法,该方法能够为AGV 提供准确的导航信息。黎译繁[30]为解决物流场景下相机识别二维码图像出错率高的问题,综合运用灰度加权平均值法、中值滤波法、二值全局阈值法实现对二维码的快速解码,通过进行畸变矫正和边缘检测算法提高了对随意摆放和部分磨损二维码图像的识别检测精度。宋禹辰[31]针对日本制造商Denso Wave 设计的矩阵二维码在连续使用中存在解码时间过长的问题,通过自定义的简易二维码图案和设计的低复杂度算法缩短了AGV 连续工作状态下对二维码的解码时间,提高了AGV 的定位精度。徐庆等[32]设计的AGV 通过车载相机采集QR 码实现了AGV 在站点处的转向动作,同时依靠编码器在站点间行走提供的运动信息,保证了AGV 导航的高精度位置误差修正。基于二维码图像特征的光学导引技术具有成本低廉、设计简易的优点,能够很好地在结构化场景(特别是仓储类室内)中发挥定位与导航作用,但是这种技术目前只能用于室内重载AGV 作业,室外使用时容易致使二维码等标志物遭受污染、破坏,且该技术存在路径更改柔性差、标志物安装位置近等缺点,使得二维码等标志物的定位方式不适于室外长距离、长时间的AGV 导航任务。
由于光学导引技术存在路径固定、灵活性差、智能化程度低等局限性,且随着21 世纪计算机视觉技术的快速发展,具有“真正意义”的VSLAM 技术逐渐进入人们的视野。VSLAM 技术是指对连续图像的特征或像素进行匹配,结合三角剖分等多视图几何方法估计相机位姿,同时恢复周围环境地图的技术。目前VSLAM 技术主要包括基于特征的VSLAM 和直接VSLAM 方法。Mur-Artal 等[33-34]提出的快速特征点提取和描述(oriented fast and rotated brief,ORB)-SLAM系列算法属于基于特征的VSLAM 技术,支持单目相机、双目相机、深度相机、鱼眼相机等多种视觉传感器的通用接口,具有高精度定位、地图重用、重定位等多种特点。然而基于特征的VSLAM 技术从弱光照、弱纹理、快速运动的场景中提取有效的特征信息较为困难。为克服这些缺点,有学者提出了根据像素灰度变化进行匹配的直接VSLAM 方法。直接VSLAM方法没有描述子计算过程,避免了特征提取与特征匹配的计算时间。例如,Forster 等[35]提出的半直接单目视觉里程计能够实现高帧率速度运行,提高了重复纹理、狭窄场景下定位的鲁棒性,但由于其在实际应用中着重强调运行速度,因此丢失了高精度定位能力。而直接VSLAM 方法能够明显克服特征缺失场景的难题,提供弱纹理下的定位解决方案。但直接VSLAM 方法的缺点同样明显,由于图像中存在多个亮度相似的像素点,大大增加了算法识别难度。另外直接VSLAM 方法基于灰度值不变的强假设,对具有自动曝光功能的相机或者外界光照强烈变化的场景容忍性较差。
相比国外,国内对VSLAM 技术的研究起步较晚。赵黎明[36]通过运用主成分分析法对尺度不变特征变换(scale-invariant feature transform,SIFT)特征算子降维,建立了单目VSLAM 导航数学模型,有效解决了港口集装箱运输智能化水平低的问题。唯一不足之处是单目VSLAM 方法不能解决尺度不确定性的问题,因此存在严重的估计漂移现象。针对此问题,李月华等[37]提出了一种双目相机的亚像素改进匹配算法,在后端优化中引入了人工信标,消除了累计误差的影响,同时能够提高闭环检测的准确性。但该方法中存在人为添加信息环节,并不是完全的智能导航方案。
目前VSLAM 方法需要采集大量的图像信息,且需处理图像间匹配的问题,加之复杂的预处理以及优化算法,使得嵌入式平台以及缺乏图形处理器的终端无法适应如此大量的工作。因此,现有的视觉SLAM 在工程上应用的可靠性有待提升,另外,其也不能处理强旋转场景、运动模糊场景以及丢失定位后快速重定位的问题。
鉴于对上述不同导航技术的探索与分析,总结了基于不同传感器的4 种AGV 导航定位技术存在的优缺点以及使用范围,详见表1。
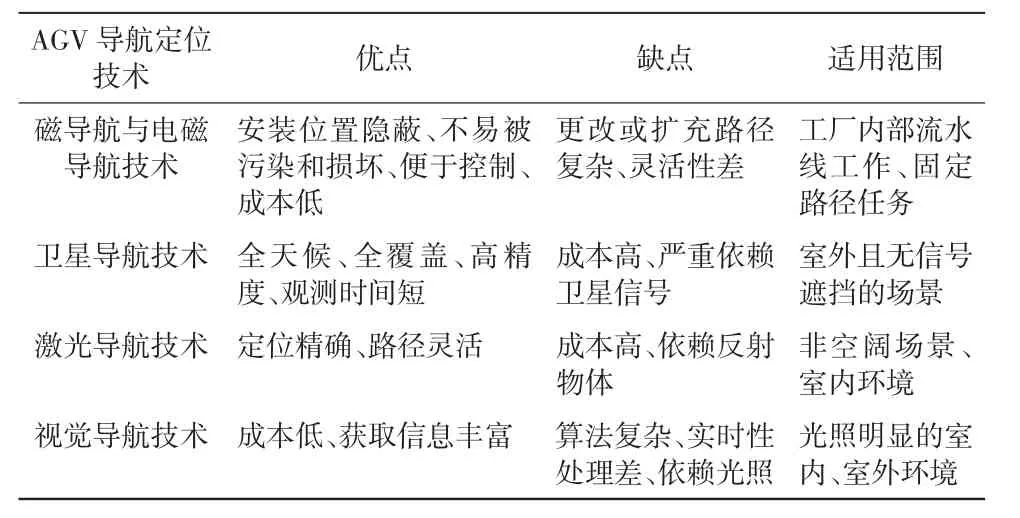
表1 4 种AGV 导航定位技术的优缺点比较
2 结语与展望
单一导航方式存在一定的局限性,无法满足方舱转运AGV 导航系统的稳定性、高效性要求。而多传感器融合的导航方式逐渐受到人们关注,主要原因是通过选择性地提取不同传感器中的有效信息,进行不同传感器信息互补,能够有效提高AGV 环境适应性、系统容错性。针对野外条件下方舱转运的特点,为满足野战医疗方舱的部署需求,方舱转运AGV应灵活组合卫星接收机、视觉传感器、激光传感器等多传感器技术,通过系统综合不同传感器的优势,弥补单一传感器的不足,实现多传感器融合的组合导航。与此同时,还应创新发展紧耦合数据关联模型,解决不同传感器标定、时间同步、多噪声误差模型建立以及硬件精度等多因素影响等问题,以提升方舱转运AGV 在环境不确定性、非结构化野外部署中的稳定性,从而实现野外条件下方舱快速、稳定部署的目的。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:48
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
童话世界(2020年32期)2020-12-18 18:15:41
科学(2020年5期)2020-11-26 08:19:24
文苑(2020年7期)2020-08-12 09:36:18
科学中国人·下旬刊(2020年2期)2020-06-03 09:26:44
科学中国人·上半月(2020年2期)2020-06-03 09:03:47
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
学生天地(2017年10期)2017-05-17 05:50:46
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20 01:05:11
