2转动高精度重载并联机构构型综合
2023-08-31 08:44:48杜小强赵世豪贺磊盈
浙江理工大学学报 2023年1期
杜小强 赵世豪 贺磊盈


摘 要: 采用一種基于支链分析法的并联机构构型综合方法,综合出了具有解耦特性的2转动并联机构。首先,对2转动并联机构的结构特点进行分析,得到2转动并联机构的最简结构形式,并基于空间无约束的Kutzbach-Grübler公式对各支链的自由度组合方式进行分类,得到所有支链组合形式。其次,提出了一种并联机构初步筛选原则,并考虑球副、万向副的加工难度和成本对并联机构进行优选。最后,由于优选出的2转动并联机构存在局部自由度,对具有局部自由度的并联机构支链进行降自由度处理,得到6种解耦性好、承载能力高、精度高、结构简单的2转动并联机构。采用螺旋理论对U-RPU-UPS并联机构进行自由度分析,建立了逆运动学模型,并进行了验证。结果表明,所构建的并联机构可以实现2转动自由度的运动,并且具有很好的运动解耦特性。所综合出的2转动并联机构弥补了现有机构的不足,可作为光伏跟踪尤其是聚光光伏跟踪机构。
关键词: 并联机构;构型综合;螺旋理论;自由度分析;转动解耦;逆运动学
中图分类号: TH112
文献标志码: A
文章编号: 1673-3851 (2023) 01-0115-09
引文格式:杜小强,赵世豪,贺磊盈. 2转动高精度重载并联机构构型综合[J]. 浙江理工大学学报(自然科学),2023,49(1):115-123.
Reference Format: DU Xiaoqiang, ZHAO Shihao, HE Leiying. Configuration synthesis of 2-rotation high-precision and heavy-duty parallel mechanisms[J]. Journal of Zhejiang Sci-Tech University,2023,49(1):115-123.
Configuration synthesis of 2-rotation high-precision and heavy-duty parallel mechanisms
DU Xiaoqianga,b, ZHAO Shihaoa, HE Leiyinga,b
(a.Faculty of Mechanical Engineering & Automation; b.Key Laboratory of Transplanting Equipment and Technology of Zhejiang Province, Zhejiang Sci-Tech University, Hangzhou 310018, China)
Abstract: Based on a configuration synthesis method of parallel mechanisms of branch chain analysis, 2-rotational parallel mechanisms with decoupling characteristics were synthesized. Firstly, the structural characteristics of the 2-rotational parallel mechanisms were analyzed, and the simplest structural form of the 2-rotational parallel mechanisms was obtained. Based on the spatially unconstrained Kutzbach-Grübler formula, the combination modes of the degree of freedom of each branch chain were classified, and all branch chain combinations were obtained. Secondly, a preliminary screening principle of parallel mechanisms was proposed, and the parallel mechanisms were optimized considering the processing difficulty and cost of spherical joints and cardan joints. Then, considering that the optimized 2-rotational parallel mechanisms had passive degrees of freedom, the degrees of freedom for branch chains of parallel mechanisms with local degrees of freedom were reduced, and six kinds of 2-rotational parallel mechanisms with good decoupling, high bearing capacity, high precision and simple structure were obtained. Finally, the degrees of freedom of the U-RPU-UPS parallel mechanisms were analyzed by using the screw theory, and the inverse kinematics model was established and verified. The results show that the constructed parallel mechanisms can realize the movement of 2-rotational degrees of freedom, and have excellent motion decoupling characteristics. The synthesized 2-rotation parallel mechanism makes up for the shortcomings of the existing mechanisms, and can be used as a photovoltaic tracking mechanism, especially a concentrating photovoltaic tracking mechanism.
Key words: parallel mechanism; configuration synthesis; screw theory; analysis of degree of freedom; rotational decoupling; inverse kinematics
0 引 言
相较于串联机构,并联机构具有刚度高、精度高、承载能力强的特点[1-2]。因此,国内外学者对并联机构的构型综合方法进行了大量的研究。现有的构型综合方法主要有基于螺旋理论[3-6]、方位特征集(POC集)[7-8]、几何代数[9-11]和位移群论[12-14]等。但一般的并联机构具有较强的耦合性[15],即并联机构的一个方向上的自由度依赖于多个驱动关节。较强的耦合性导致并联机构的运动学、动力学模型复杂化,不利于机构控制。因此,研制具有解耦性的并联机构至关重要。
关于2转动并联机构的构型综合研究,一些学者采用不同的构型综合方法得到了多种机构形式。Gogu[16]基于线性变换理论提出了多种具有各向同性的2转动并联机构,但该并联机构仅有2个支链构成,因此该机构的承载能力较弱,且其中一条支链为4/5杆支链,支链较长将导致较大的末端误差。Fan等[17]基于李群理论综合出多种2平移2转动、1平移2转动和2转动并联机构,其中2转动并联机构有3种,但都采用圆柱副,结构较为复杂,且两条控制支链采用不同的驱动方式,增加了控制难度。Song等[18]基于李群理论综合出2种用于驱动卫星间链路天线的2转动并联机构,该机构由4条支链组成,结构较为复杂,且支链耦合性较强,不便于控制。王森等[19]基于螺旋理论提出了一种兼具冗余驱动特点和解耦特性的2转动并联机构的构型综合方法,但冗余驱动需要更多的动力源,并且使机构更加复杂。张彦斌等[20]基于螺旋理论综合出几种无耦合2转动并联机构,虽然仅需两条支链,但该并联机构中一条水平放置的控制支链将受到较大的垂直力,会产生较大的变形,且另一条控制支链为4杆支链。
上述构型综合方法所综合出的2转动并联机构普遍存在承载能力低、不便于控制、精度低、结构复杂的问题。为解决该问题,本文受上述方法的启发,基于一种支链分析法综合出多种具有解耦特性的2转动并联机构。相较于其他综合方法,支链分析法更加易于理解,且不需要复杂的理论知识,如螺旋理论、李群理论等。本文对2转动并联机构的基本构型要求进行分析,在支链自由度数目的约束下,研究了各支链的自由度组合和支链形式,并通过引入初步筛选原则、加工成本约束条件,综合出具有承载能力高、精度高且易于控制的2转动并联机构。所综合出的2转动并联机构弥补了现有机构的不足,可作为机构承载能力、精度要求较高的光伏跟踪尤其是聚光光伏跟踪等机构。
1 2转动并联机构结构分析與构型综合
1.1 2转动并联机构的支链组合方法分析
对于无约束的并联机构,其自由度数目可以采用Kutzbach-Grübler公式[21]进行求解,即:
M=6(n-g-1)+∑gi=1fi(1)
其中:M为并联机构的自由度数目,n表示包含机架的并联机构构件数,g为并联机构的运动副数目,fi为第i个运动副的自由度数目。
常用的并联机构运动副有万向副(U)、球副(S)、移动副(P)、转动副(R)和圆柱副(C),其中圆柱关节相当于共轴的移动副和转动副。为了使综合出的并联机构结构简单,本文不考虑使用圆柱副。
并联机构一般由以下结构组成:动平台、定平台、支链。其中支链的上下两端通过运动副与动平台和定平台相连。在几何上要使一个平面处于稳定状态至少需要3个支撑点。因此,应用于并联机构,与动平台相连接的关节至少要有3个,即与动平台相连的支链至少有3个。为了提高并联机构的承载能力,可选择3个以上的支链,但支链个数的增加必然会增加机构的制造成本和机构的复杂性,而且支链个数越多,并联机构的耦合性越强,控制难度越大。对于需要构型的2转动自由度的并联机构,为使其结构简单、解耦性好、易于控制,仅需2个驱动器即可。
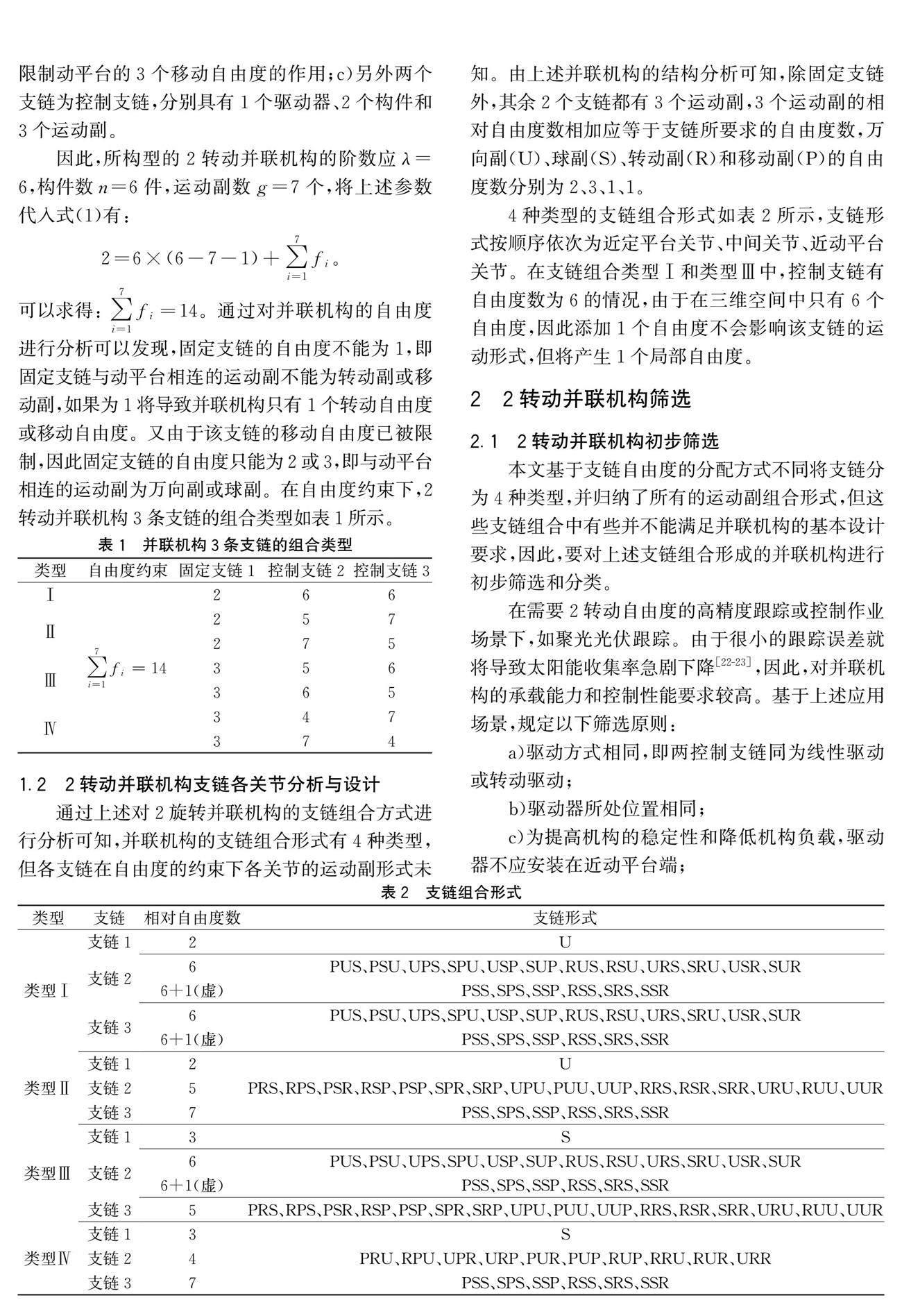
因此,所构型的并联机构应具有以下结构特点:a)具有3个支链;b)其中1个支链为固定支链,通过运动副与动平台相固定,该支链起到支撑动平台和限制动平台的3个移动自由度的作用;c)另外两个支链为控制支链,分别具有1个驱动器、2个构件和3个运动副。
因此,所构型的2转动并联机构的阶数应λ=6,构件数n=6件,运动副数g=7个,将上述参数代入式(1)有:
2=6×(6-7-1)+∑7i=1fi。
可以求得:∑7i=1fi=14。通过对并联机构的自由度进行分析可以发现,固定支链的自由度不能为1,即固定支链与动平台相连的运动副不能为转动副或移动副,如果为1将导致并联机构只有1个转动自由度或移动自由度。又由于该支链的移动自由度已被限制,因此固定支链的自由度只能为2或3,即与动平台相连的运动副为万向副或球副。在自由度约束下,2转动并联机构3条支链的组合类型如表1所示。
1.2 2转动并联机构支链各关节分析与设计
通过上述对2旋转并联机构的支链组合方式进行分析可知,并联机构的支链组合形式有4种类型,但各支链在自由度的约束下各关节的运动副形式未 知。由上述并联机构的结构分析可知,除固定支链外,其余2个支链都有3个运动副,3个运动副的相对自由度数相加应等于支链所要求的自由度数,万向副(U)、球副(S)、转动副(R)和移动副(P)的自由度数分别为2、3、1、1。
4种类型的支链组合形式如表2所示,支链形式按顺序依次为近定平台关节、中间关节、近动平台关节。在支链组合类型Ⅰ和类型Ⅲ中,控制支链有自由度数为6的情况,由于在三维空间中只有6个自由度,因此添加1个自由度不会影响该支链的运动形式,但将产生1个局部自由度。
2 2转动并联机构筛选
2.1 2转动并联机构初步筛选
本文基于支链自由度的分配方式不同将支链分为4种类型,并归纳了所有的运动副组合形式,但这些支链组合中有些并不能满足并联机构的基本设计要求,因此,要对上述支链组合形成的并联机构进行初步筛选和分类。
在需要2转动自由度的高精度跟踪或控制作业场景下,如聚光光伏跟踪。由于很小的跟踪误差就将导致太阳能收集率急剧下降[22-23],因此,对并联机构的承载能力和控制性能要求较高。基于上述应用场景,规定以下筛选原则:
a)驱动方式相同,即两控制支链同为线性驱动或转动驱动;
b)驱动器所处位置相同;
c)为提高机构的稳定性和降低机构负载,驱动器不应安装在近动平台端;
d)若驱动关节为转动副,为便于安装并降低近定平台端杆件的负载,驱动器只能安装在近定平台端。
基于上述筛选原则,可将并联机构的控制支链按驱动方式分为“P××”、“×P×”和“R××”3种形式。其中,“P××”形式的支链采用线性驱动,所组成并联机构的工作空间大小取决于驱动杆的行程;“×P×”形式的支链结构简单;“R××”形式的支链采用转动驱动,由于电机具有两种转动形式(正转反转),因此,所组成并联机构的运动学逆解有多种形式,支链结构如图1所示。基于4类支链组合形式并考虑上述筛选原则,得到了并联机构初选构型,如图2所示。
2.2 2转动并联机构优选
通过初步筛选得到了满足基本工作要求的3类并联机构,其中“P××”形式为28种,“×P×”形式为22种,“R××”形式为28种,总计78种。在这些构型中,支链自由度的不同分配方式、运动副的不同组合方式都会对并联机构的性能和自由度产生影响。在并联机构的实际应用中,考虑加工精度和成本,应尽可能减少球副和万向副的使用,且当移动副不作为驱动副时,在重载下将被动的产生位移,为提高机构的稳定性并使结构简单,也应避免使用。因此,在上述初选构型中更符合要求的构型有:
“P××”形式:U-PUS(PSU)-PUS(PSU)、U-PRS(PSR)-PSS、S-PRU(PUR)-PSS;
“×P×”形式:U-UPS(SPU)-UPS(SPU)、U-RPS(SPR)-SPS、S-RPU(UPR)-SPS;
“R××”形式:U-RUS(RSU)-RUS(RSU)、U-RRS(RSR)-RSS、S-RRU(RUR)-RSS。
其中:U-PUS-PUS、U-PSU-PSU、U-UPS-UPS、U-SPU-SPU、U-RUS-RUS、U-RSU-RSU为对称式并联机构,具有更好的各向同性[21]。以“P××”形式為例,构型U-PRS-PSS和S-PRU-PSS具有相同的结构,仅在控制支链2的近动平台关节处的运动副有所不同,但球副S相对于万向副U仅引入了一个局部自由度,2种机构在空间中的运动特性是相同的,为降低加工成本,并去除局部自由度,可将球副S替换为万向副U,得到构型U-PRU-PUS(PSU)。同理,可对“×P×”形式和“R××”形式中的构型进行运动副的替换,可得到构型U-RPU-UPS(SPU)和U-RRU-RUS(RSU)。这3种并联机构的具体形式如图3所示。
这3种构型各有其结构特点。U-PRU-PUS(PSU)并联机构采用线性驱动器进行驱动,并安装在定平台上,该构型具有结构紧凑,工作空间大、承载能力高等特点,但由于采用线性驱动器,因此将导致该机构的整体高度较高,不易承受水平向载荷。U-RPU-UPS(SPU)并联机构采用线性驱动器,并安装在中间关节上,该构型具有体积小、承载能力高,但由于万向副和球副转角的限制,受几何条件约束,相较于其他两种机构工作空间较小。U-RRU-RUS(RSU)并联机构采用旋转驱动,并安装在定平台上,该构型具有承载能力高、工作空间大的特点。
3 2转动并联机构自由度验证
为验证所构型的并联机构是否正确,选取U-RPU-UPS并联机构进行自由度分析。U-RPU-UPS并联机构的结构简图和运动螺旋分布如图4所示,该机构由定平台(B1B2B3)、动平台(A1A2A3)和U支链(A1B1)、RPU支链(B2C2A2)、UPS支链(B3C3A3)3条支链组成,且动平台和定平台都为直角三角形,3条支链通过运动副分别与动平台、定平台的3个角相连,固定支链一端固定于定平台的直角点B1,一端通过万向副与动平台相连。
在固定支链中,万向副(U)的静旋转轴线与定平台的直角边B1B3平行,动旋转轴线与定平台的直角边B1B2位于同一平面。在RPU支链中,万向副(U)的静旋转轴线与静平台的直角边B1B3平行,且转动副(R)的旋转轴线与万向副(U)的静旋转轴线相互平行。在UPS支链中,万向副(U)的静旋转轴线与定平台的直角边B1B2平行。
在定平台直角点B1和动平台直角点A1分别建立系统坐标系o-xyz和动坐标系o′-uvw。在系统坐标系o-xyz下,固定支链U的运动螺旋系可表示为
$11=(S11;r11×S11)=(0 1 0; -zA1 0 0),
$12=(S12;r12×S12)=(l12 0 h12; 0 zA1l12 0)(2)
其中:Sij为螺旋轴线方向的单位矢量;rij为螺旋轴线上任意一点相对系统坐标原点的位置矢量;lij为第i条支链第j个运动副的轴线在坐标轴x上的方向余弦;hij为第i条支链第j个运动副的轴线在坐标轴z上的方向余弦。
对式(2)求互易积,可得反螺旋系:
$r11=(1 0 0; 0 -zA1 0),
$r12=(0 1 0; -zA1 0 0),
$r13=(0 0 1; 0 0 0),
$r14=(0 0 0; -h12 0 l12)(3)
其中:$r11为过A1点并沿x轴方向的约束力,$r12为过A1点并沿y轴方向的约束力,$r13为过系统坐标系原点o并沿z轴方向的约束力,$r14为垂直于$12和y轴的约束力偶。因此,固定支链绕z方向的转动和沿x、y、z方向的移动被限制。
RPU支链的运动螺旋系可以表示为:
$21=(S21;r21×S21)=(0 1 0; -zB2 0 xB2),
$22=(S22;r22×S22)=(0 0 0; xC2 0 zC2),
$23=(S23;r23×S23)=(0 1 0; -zA2 0 xA2),
$24=S24;r24×S24)=(l24 0 h24; 0 l24zA2- h24xA2 0)(4)
可得其反螺旋系:
$r21=(0 0 0; h24 0 -l24),
$r22=(0 -l24 0; l24zA2-h24xA2 0 0)(5)
其中:$r21为垂直于$23和y轴的约束力偶;$r22为过C2点并与y轴平行的约束力。因此,RPU支链绕z轴的转动和沿y轴的移动被限制。
UPS支链的运动螺旋系可以表示为:
$31=(S31;r31×S31)=(1 0 0; 0 zB3-yB3),
$32=(S32;r32×S32)=(0 m32 h32; h32yB3 0 0),
$33=(S33;r33×S33)=(0 0 0; xC3 yC3 zC3),
$34=(S34;r34×S34)=(1 0 0; 0 zA3 -yA3),
$35=(S35;r35×S35)=(0 1 0; -zA3 0 xA3),
$36=(S36;r36×S36)=(0 0 1; yA3 -xA3 0)(6)
其中:mij为第i条支链第j个运动副的轴线在坐标轴y上的方向余弦。
对式(6)等号两边做互易积,得到UPS支链的运动螺旋系组成的矩阵为满秩矩阵R($)=6,因此,UPS支链在空间中具有6个独立自由度。
结合式(3)、式(5)可建立U-RPU-UPS并联机构的约束螺旋系:
$r11=(1 0 0; 0 zA1 0),
$r12=(0 1 0; -zA1 0 0),
$r13=(0 0 1; 0 0 0),
$r14=(0 0 0; -h12 0 l12),
$r15=(0 0 0; h24 0 -l24),
$r16=(0 -l24 0; l24zA2-h24xA2 0 0)(7)
由固定支链与RPU支链的几何关系和相对运动可以看出,在系统坐标系o-xyz下,多边形A1A2C2B2B1始终在xoz平面内,因此,动平台的关节点A2也始终在xoz平面内运动。多边形A1A2C2B2B1各关节点的位置关系如图5所示。
基于固定支链和RPU支链的几何关系可得:
(zA2-zA1)cosβ=xA2sinβ(8)
其中:β表示动坐标系u轴与系统坐标系x轴的夹角。
同时,系统在运动过程中,螺旋$12和螺旋$24始终共轴线,即两螺旋线沿x轴和z轴的余弦分量为:
sinβ=n12=n24,
cosβ=l12=l24(9)
根據固定支链和RPU支链的几何位置关系,并考虑运动副的相对位姿,结合式(8)—(9),对式(7)进行分析,可以看到约束螺旋$r12和$r22线性相关,约束螺旋$r14和$r21线性相关,求式(7)的反螺旋,可得U-RPU-UPS并联机构的运动螺旋系为:
$m1=(0 1 0; -zA1 0 0),
$m2=(l12 0 h12; 0 l12zA1 0)(10)
运动螺旋$m1为一个绕平行于y轴并过A1点的旋转运动,即并联机构具有一个绕系统坐标系y轴转动自由度;运动螺旋$m2为一个绕平行于u轴并过A1点的旋转运动,即并联机构具有一个绕动坐标系u轴的转动自由度。
由U-RPU-UPS并联机构的约束螺旋系可知,2个约束力偶具有相同的方向,因此为并联机构添加了一个公共约束,即λ=1,可得并联机构的阶数为d=6-λ=5。2个约束力偶相当于一个约束力偶,并限制了并联机构在z方向上的转动。基于自由度修正G-K公式可得:
M=d(n-g-1)+∑gi=1fi+v(11)
其中:d为并联机构的阶数,v为并联机构的冗余约束个数。
对于非对称并联机构,冗余约束可由以下公式计算求得
v=∑p1qi-λp-k(12)
其中:qi为第i个支链的独立反螺旋数,p为支链个数,k为除公共约束外剩余的独立约束数。
基于上述螺旋理论分析,并结合式(11)—(12),可得U-RPU-UPS并联机构的自由度为
M=5×(6-7-1)+12+0=2(13)
由式(13)可得U-RPU-UPS并联机构的自由度数为2,与所构型的并联机构的自由度相符,验证了所述构型的正确性。通过螺旋分析可知,RPU支链与固定支链处于同一平面,因此驱动杆件B2C2只会改变动平台绕y轴的转角,该机构为解耦机构[24]。同理,也可证明U-PRU-PUS(PSU)和U-RRU-RUS(RSU)并联机构为解耦机构。
4 2转动并联机构逆运动学分析
由上述自由度分析可知,U-RPU-UPS并联机构在空间中拥有2个旋转自由度,即动平台相对于定平台绕系统坐标系o-xyz的y轴旋转的欧拉角为-β,绕动坐标系o′-uvw的u轴旋转的欧拉角为α,于是可得旋转变换矩阵为:
R=R(y,-β)R(u,α)=
cosβ0-sinβ
010
sinβ0cosβ100
0cosα-sinα
0sinαcosα(14)
在系统坐标系o-xyz下,由并联机构的几何关系可知:
‖AiCi‖2=‖oAi-oCi‖2=Li2,i=2,3(15)
将旋转矩阵和各关节的位置矢量代入式(15),可得U-RPU-UPS并联机构的运动学逆解公式:
l1=(acosβ-b)2+(L1+asinβ)2
l2=(-asinαsinβ)2+(acosα-b)2+ (L1+asinαcosβ)2(16)
其中:li、L1、a、b分别表示并联机构的驱动杆AiBi、固定杆oA1、动平台直角边A1Ai、定平台直角边oBi。
给定并联机构的尺寸参数:a=320 mm、b=320 mm、L1=440 mm,动平台的运动轨迹为:
β=35sin(πt)
α=-40sin(πt)(17)
将尺寸参数和动平台运动轨迹代入运动学逆解公式,采用Matlab对运动学逆解公式进行求解可得驱动杆长,并将Solidworks中建立的U-RPU-UPS并联机构的模型導入Adams中进行逆运动学仿真。U-RPU-UPS并联机构的仿真模型如图6所示,驱动杆长2 s内的变化曲线如图7和图8所示。
由图7和图8可见,通过运动学逆解公式求得的U-RPU-UPS并联机构的驱动杆长变化曲线与Adams软件仿真得到的基本一致,表明该运动学逆解模型的正确性。
5 结 论
为得到结构简单、便于控制、承载能力高、精度高的2转动并联机构,本文基于一种支链分析法进行了2转动并联机构的构型综合,核心思想是基于2转动并联机构的最简结构,通过对各支链的自由度组合和支链形式进行研究,在筛选原则下进行构型优选。所综合出的2转动并联机构弥补了现有2转动并联机构的不足,并可作为聚光光伏等系统的跟踪机构,为后续进行并联机构误差补偿研究奠定了基础。主要结论如下:
a)通过无约束条件下的Kutzbach-Grübler公式对并联机构各支链的自由度组合和支链形式进行了分类,发现对于具有6个自由度的支链,添加1个自由度不会影响支链的运动特性,基于此对2转动并联机构的支链形式进行了扩充,然后基于不同运动副组合得到了4类构型,分别为324、96、288种和60种,共计768种构型。
b)通过对初步筛选得到的2转动并联机构进行分析发现,一些构型具有较好的各向同性,一些构型虽然运动副组合不同,但具有相同的运动特性。并发现一些构型存在局部自由度,通过进行降自由度处理(去除局部自由度),得到6种具有解耦特性的构型U-PRU-PUS(PSU)、U-RPU-UPS(SPU)、U-RRU-RUS(RSU)。
c)通过对U-RPU-UPS并联机构进行自由度分析和逆运动学分析,验证了并联机构的解耦性和运动特性。研究结果表明,所综合出的并联机构可实现2转动运动,具有解耦特性,并且逆运动学控制简单。
参考文献:
[1]Ebrahimi I, Carretero J A, Boudreau R, et al. A family of kinematically redundant planar parallel manipulators[J]. Journal of Mechnaical Design, Transactions of the ASME, 2008, 130(6): 0623061-0623068.
[2]Michel C, Loicq J, Thibert T, et al. Optical study of diffraction grating/Fresnel lens combinations applied to a spectral-splitting solar concentrator for space applications[J]. Applied Optics, 2015, 54(22): 6666-6673.
[3]Kong X W, Gosselin C M. Type synthesis of 3-DOF spherical parallel manipulators based on screw theory[J]. Journal of Mechanical Design, 2004,126(1):101-108.
[4]曾达幸,黄真. 基于螺旋理论的转动解耦并联机构型综合[J].中国科学:技术科学,2011,41(5):585-591.
[5]Liu Y, Li Y Z, Yao Y N, et al. Type synthesis of multi-mode mobile parallel mechanisms based on refined virtual chain approach[J]. Mechanism and Machine Theory, 2020,152: 103908.
[6]陈淼,张氢,陈文韬,等. 基于空间几何的无伴随运动并联机构分析与综合[J].机械工程学报,2021,57(1):77-85.
[7]邓嘉鸣,余同柱,沈惠平,等. 基于方位特征的六自由度并联机构型综合[J].中国机械工程, 2012,23(21):2525-2530.
[8]沈惠平,孙驰宇,朱小蓉,等. 以基本运动链为单元的并联机构拓扑结构设计[J].农业机械学报, 2015,46(12):337-345.
[9]Song Y M, Han P P, Wang P F. Type synthesis of 1T2R and 2R1T parallel mechanisms employing conformal geometric algebra[J]. Mechanism and Machine Theory, 2018,121: 475-486.
[10]韩鹏鹏. 基于共形几何代数的1T2R和2R1T并联机构构型综合与优选[D]. 天津:天津大学,2018: 10-26.
[11]徐灵敏. 基于几何代数的两转一移并联机构分析与综合[D].杭州:浙江理工大学, 2021: 17-33.
[12]李秦川,黄真,Herv J M. 少自由度并联机构的位移流形综合理论[J].中国科学 E辑:工程科学 材料科学,2004, 34(9): 1011-1020.
[13]汪从哲,杨德伟,张毅,等. 基于广义动平台概念的并联机构设计方法[J].机械工程学报,2021,57(1):86-99.
[14]Snchez-García A J, Rico J M, Cervantes-Snchez J J, et al. A mobility determination method for parallel platforms based on the lie algebra of SE(3) and its subspaces[J]. Journal of Mechanisms and Robotics, 2021, 13(3): 031015.
[15]朱小蓉,李世杰,周宇東,等. 含双驱动五杆回路的弱耦合并联机构型综合[J]. 农业机械学报, 2021,52(10):434-442.
[16]Gogu G. Fully-isotropic over-constrained parallel wrists with two degrees of freedom[C]// Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain. IEEE, 2005: 4014-4019.
[17]Fan C X, Liu H Z, Zhang Y B. Type synthesis of 2T2R, 1T2R and 2R parallel mechanisms[J]. Mechanism and Machine Theory, 2013, 61: 184-190.
[18]Song Y, Qi Y, Dong G, et al. Type synthesis of 2-DoF rotational parallel mechanisms actuating the inter-satellite link antenna[J]. Chinese Journal of Aeronautics, 2016, 29(6): 1795-1805.
[19]王森,韩雪艳,李浩天,等.具有大承载能力的环路解耦两转动并联机构综合方法研究[J]. 机械工程学报,2021,57(21):68-77.
[20]张彦斌,王科明,芦风林,等.含有恰约束分支的无耦合两转动并联机构型综合[J].中国机械工程,2022,33(1):54-61.
[21]黄真,赵永生,赵铁石. 高等空间机构学[M]. 2版. 北京:高等教育出版社,2014.
[22]Feng C Q, Zheng H F, Wang R, et al. Performance investigation of a concentrating photovoltaic/thermal system with transmissive Fresnel solar concentrator[J]. Energy Conversion and Management, 2016, 111: 401-408.
[23]Burhan M, Oh S J, Chua K J E, et al. Double lens collimator solar feedback sensor and master slave configuration: Development of compact and low cost two axis solar tracking system for CPV applications[J]. Solar Energy, 2016, 137: 352-363.
[24]李为民,高峰,张建军. 六自由度并联解耦机构:CN1462673A[P]. 2003-12-24.
(责任编辑:康 锋)
收稿日期: 2022-07-29 网络出版日期:2022-10-09网络出版日期
基金项目: 国家自然科学基金项目(31971798);浙江省“领雁”研发攻关计划项目(2022C02057)
作者简介: 杜小强(1978- ),男,福建福清人,教授,博士,主要从事机械设计及理论的研究。