
全断面掘进机推进系统的电液控制系统研究
2023-08-31 09:34:20庞燕飞
机械管理开发 2023年7期
庞燕飞
(晋能控股煤业集团朔州朔煤王坪煤业有限公司, 山西 朔州 038300)
0 引言
煤炭作为现阶段我国能源结构中最重要的组成部分,其直接影响着我国的国民经济发展[1]。掘进机是煤炭开采中的重要机械设备,代替了传统的爆破作业模式,增加了煤炭井下开采的安全性和可靠性,实现了安全、快速、高效开采。全断面掘进机是集机械、电气、液压为一体的大型机械,在实际应用过程中,为了提高掘进机的控制水平,必须将掘进速度与掘进机自身的电液控制相匹配,保证其能够稳定地开展工作[2]。全断面掘进机推进系统一般设置有两种驱动方式,一种是液压驱动,另一种是电机驱动。液压驱动相比较电机驱动有着大功率传输、过载保护容易实现等优点被广泛应用。随着煤炭开采环境以及开采难度的不断加大,对掘进机推进系统的电液控制系统提出了更高的要求。本文通过对全断面掘进机推进系统的电液控制部分进行设计研究,提出了基于模糊-PID 算法控制全断面推进系统的电液控制系统,能够促进全断面掘进机的进一步发展。
1 全断面掘进机推进系统概述
1.1 全断面掘进机推进系统
全断面掘进机作为煤炭开采巷道掘进的主要设备,经过长期的发展已经达到了集机电液一体化。本文研究的全断面掘进机是主要针对其推进部分进行的,使其更加适合煤矿井下的开采环境。全断面掘进机的推进系统是由敏感液压泵、比例调速阀、敏感多路阀、执行机构以及其他配件组成的。在其工作的过程中通过对比例调速阀的动作来调整掘进机推进系统油缸的运动方向以及流量的大小[3]。其中敏感液压油泵结构采用的是斜盘式轴向柱塞泵,实现了输出流量与驱动速度比例呈正比且能够无级调速。敏感液压油泵中有负载传感阀、功率控制阀以及压力切断阀等,负载传感阀通过对压力的感应来实现数据转化,以达到调整调节泵的输出量[4]。当液压泵的输出功率低于设定的切断功率时,液压泵的流量与负载传感阀的压力无关,以实现其他执行元件的工作状态不受其干扰。当液压泵的输出功率高于设定值时,PLC 控制器会根据压力数据的大小对相对应的液压阀进行控制,保证其在一定的控制范围内。例如对液压缸进行调整,使其液压油减少或者增加保持在一定的压力范围内稳定。全断面掘进机推进机构的液压系统如图1所示。敏感多路阀实现了对全断面掘进机推进系统的过载保护、电比/流量可调、压力/电比例可调等。
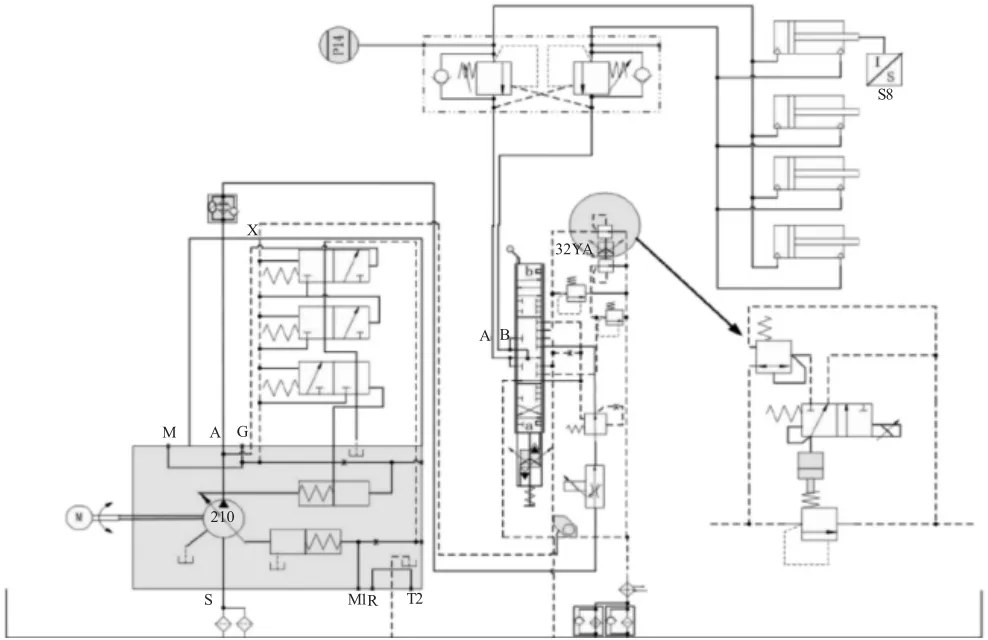
图1 全断面掘进机推进机构的液压系统
1.2 全断面掘进机推进系统工作原理
全断面掘进机推进系统在工作过程中是通过以下方式来运行的:全断面掘进机推进系统的前支撑部分有上、下两个部分,上、下两部分的支撑是半圆弧形的,前下支撑是由左、右两个支撑靴组成的。当全断面掘进机要实现前进、后退、转向等动作时,要利用上、下两个支撑进行调整。推进动作时,掘进机机身的支点是前后撑靴。利用前后撑靴的反作用力以及传递反扭距实现全断面掘进机的推进动作。掘进机完成机身状态的调整后,撑靴支撑到岩壁且达到相应的压力后关闭换向阀等。在掘进机运动的状态时,对掘进机推进系统的液压油的压力和流量等进行准确控制。刀盘在推进油缸的作用下,开展切削工作,滚刀对岩面进行切削,切削出来的岩石经过收集后到达收集口,再通过运输螺旋机将其输送到转运皮带上,实现整个过程。全断面推进系统掘进过程如图2 所示。
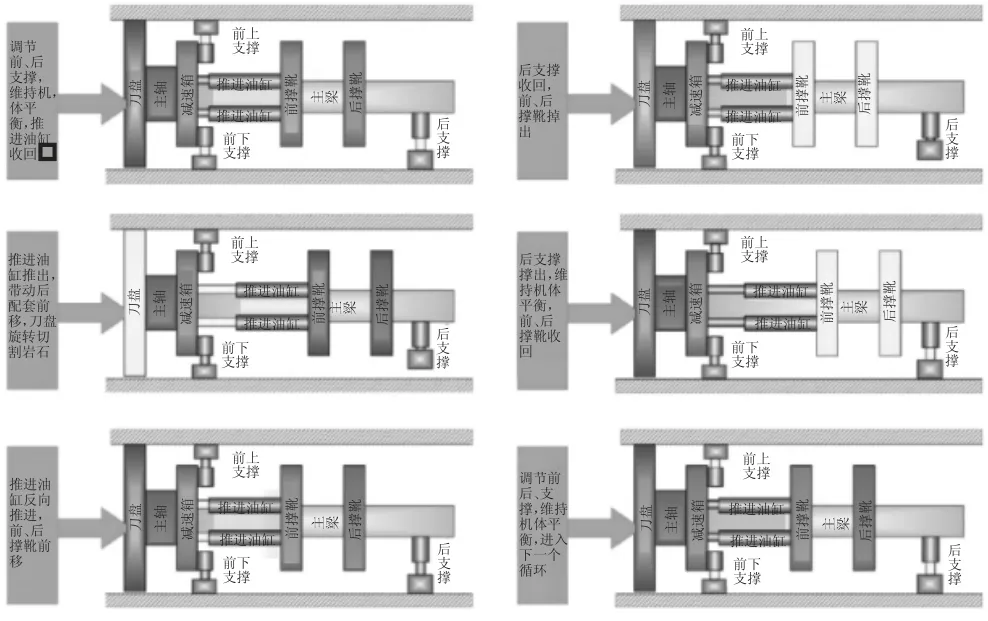
图2 全断面推进系统掘进过程
2 全断面掘进机推进系统设计
由于全断面掘进机推进系统的工作环境在井下,因此在实际设计时要充分考虑到对瓦斯的防护、井下湿潮的环境。全断面掘进机推进系统在工作时需要进行大量的采集、传输工作,并实施控制,将其在显示屏上进行显示。在电力供电方面选择的是交流1 140 V高压供电,利用变压器将其降到220 V 和127 V,再通过开关电源等对其进行稳压至24 V,以保证各部件的供电。全断面掘进机推进系统需要多种传感器进行对掘进过程中的各个信号进行监测。采用GUC1200A型位移传感器安装到掘进机的推进缸前段对油缸的行程进行监测。GPD60 压力传感器安装到推进系统的各个液压管路中,对管路中液压油的压力进行监测。GWD70 温湿度传感器对掘进机掘进环境中的温度和湿度进行监测,防止出现工作环境中温湿度过高的现象。掘进机推进系统的核心控制器采用西门子S7-300PLC,实现对掘进机推进系统的数据信息进行分析处理,现场安装如图3 所示。全断面掘进机推进系统的推进速度控制模式采用速度控制和压力控制相结合的方式,同时结合模糊-PID 控制方式实现对掘进机井下复杂作业的实时调控。

图3 PLC 硬件现场安装
3 全断面掘进机推进系统模糊-PID 控制仿真模拟
全断面掘进机推进系统模糊-PID 控制模型如图4 所示。为了保证其能够有效地进行使用,利用Simulink 环境下联合AMESim 仿真。通过AMESim 将全断面掘进机推进系统的推进压力以及流量采集出来,利用Simulink 构建PID 控制算法,结合采集到的推进压力以及流量的数据进行PID 运算,利用Zigler-Nichols 对PID 的参数进行整定运算。PID 参数如表1 所示。
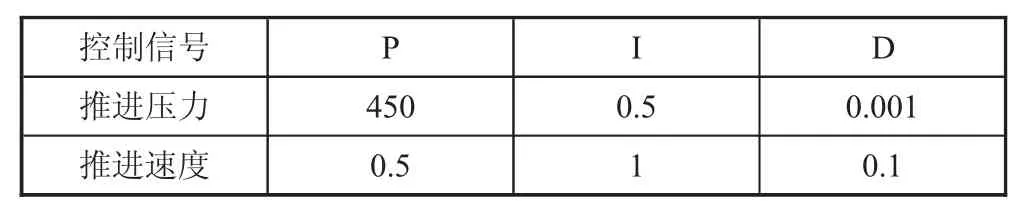
表1 PID 参数参考
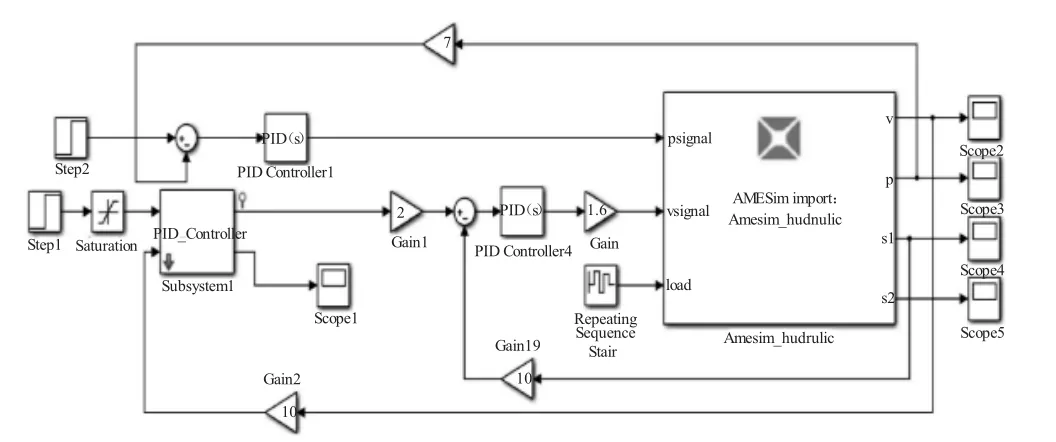
图4 全断面掘进机推进系统模糊-PID 控制模型
通过对掘进机推进系统进行建模,在Simulink 中进行仿真实验,阶跃信号设置为1 mm/s,在5 s 左右对系统施加120 kN 的扰动负载,最终取得了PID 与模糊-PID 的速度响应曲线对比结果如图5 所示。

图5 PID 与模糊-PID 速度响应曲线
通过图5 速度响应曲线对比能够反映出PID 控制算法和模糊-PID 控制算法相比较,模糊-PID具有更加良好的动态响应,并且其控制的稳定性也优于PID 控制算法,更好地验证了模糊-PID 的有效性和实用性。
4 结语
全断面掘进机作为煤矿开采中的重要设备,其对煤炭的开采速度有着至关重要的作用,为了保证全断面掘进机能够提高其掘进速度和掘进效率,本文对全断面掘进机的推进系统进行研究,阐述了掘进机的推进系统以及其工作原理,结合液压和电气系统设计了全断面掘进机的控制系统,采用模糊PID 控制方式实现掘进机更加精准的控制和更加可靠的控制。最后利用模拟仿真分析对比模糊-PID 控制与普通PID 控制的优劣,验证了模糊-PID 控制更加具有可靠的有效性和较高的实用性,为全断面掘进机的发展奠定了一定的基础,促进了煤矿更加朝着自动化、智能化转型发展。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
化工管理(2021年7期)2021-05-13 00:46:16
装备制造技术(2020年3期)2020-12-25 05:22:38
测控技术(2018年8期)2018-11-25 07:42:34
制造技术与机床(2017年6期)2018-01-19 02:41:07
专用汽车(2016年4期)2016-03-01 04:14:27
凿岩机械气动工具(2015年3期)2015-11-11 07:32:49
电源技术(2015年9期)2015-06-05 09:36:06
凿岩机械气动工具(2014年3期)2014-03-01 04:00:08
凿岩机械气动工具(2014年2期)2014-03-01 04:00:00
