
井下电机车调度监控自动化设计
2023-08-31 09:34:44田少帅
机械管理开发 2023年7期
田少帅
(山西焦煤西山煤电东曲矿运输科, 山西 古交 030200)
0 引言
井下电机车运输具有方式灵活、运载效率高等优点,可实现煤矿地面与井下的点对点运输,极少的中间转载环节可大大提高井下运输安全及可靠性。目前我国大力发展井下电机车运输技术,但在车辆调度指挥及实时监控两方面存在诸多问题。电机车运行多采用定时定点线性运输模式,地面调度人员通过停车点固定电话获取车辆运行情况,无法对车辆实施合理调度指挥,且驾驶员只能在停车点等待得到指令后发车,运输效率大大降低。同时调度员无法获取机车在巷道中运行的实时信息,驾驶员只能盲目驾驶,存在极大安全隐患。
针对上述问题,本文首先建立了无线通信网络,通过车载采集终端实现车辆的运行数据实时采集上传,并通过上位机交互界面对车辆运行轨迹、模拟画面进行实时显示。在此基础上,对井下电机车运行方式及调度方案进行优化,通过对侧进路闭锁、岔路口信号灯互锁等手段解决车辆混行安全问题,系统经自适应控制策略可对司控道岔执行器进行远程自动控制,在紧急情况下也可以由调度员根据机车运行情况随时分区段、进路以及车辆的形式进行手动调度,大大提高井下电机车运输效率及安全性[1]。
1 井下电机车交通运输调度监控系统总体设计方案
传统井下电机车运输系统主要存在的问题是无法实现运输全流程的感知及智能合理调度,由于监控现场多采用定点监控基站区段检测,在巷道转弯处及障碍物较多、粉尘浓度较高的复杂路段监控存在较大死区。采用有线网络进行通信导致各类信号在转换及传输上存在错误及滞后,现场数据不具备实时性,实时监控手段的缺失导致调度员无法掌握井下所有运行车辆的分布及行驶状态,只能盲目调度,事故发生率较高。车辆运行方式及调度控制逻辑不合理,信号灯转换、分区分段行车指令、道岔位置与车辆进路开放等调度动作只能手动操作完成,当出现岔口会车、多车辆混行等情况时无法下达及时、合理的调度指令,运输安全性及效率无法得到保证。
本文从车辆运行实时监控及调度指挥方式优化两方面对井下电机车运输系统进行智能化设计改造。高效快速的通信网络是实现实时监控与智能调度的基础,在系统原有有线以太网的基础上,采用Zigbee无线通信对井下通信网进行架构,实现井下通信网关与现场各监控基站的数据传输。实时监控方面,系统具备车辆位置精确定位、车速检测、道岔集中监控、岔间方向遥控功能,还具备会车预警、超速报警、追尾报警等安全功能。按照上述功能划分,采用模块化思想对系统整体结构进行设计,如图1 所示。
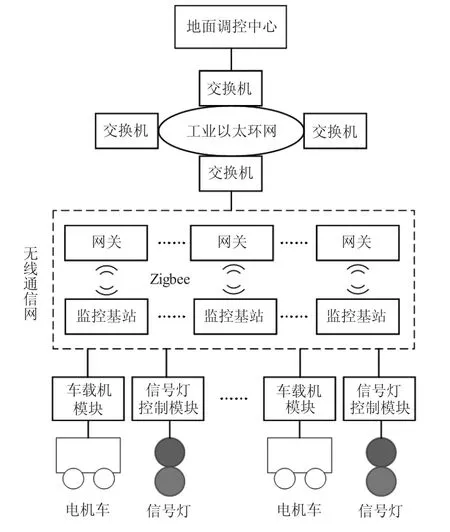
图1 系统整体结构设计
通信网络由地面以太环网及井下无线通信网构成,无线通信网主要设备包括安装于巷道的各网关及监控基站,网关可接收来自监控基站的现场采集参数,通过光纤上传至地面调控中心上位机,并接收下达来自上位机的控制指令。
2 系统硬件方案设计
系统核心硬件主要包括网关、监控基站、车载机、司控道岔装置等,为了实现系统监控与智能调度功能,需对上述硬件部分进行合理设计,各核心硬件选型设计如下:
2.1 KJ539-W 矿用本安型机车运输监控网关
KJ539-W 监控网关的主要功能是实现井上控制指令与现场采集数据的上传下达,其输入电压为DC 5 V,最大工作电流≤700 mA,传输速率可达100 Mbit/s。KJ539-W 通过光缆一方面接受工控机的访问,将所收集的检测信息打包上传至上位机,同时接受上位机下发的控制指令;另一方面监控网关将对所连接的检测设备进行循环检测,如接收器机车累计请求信息、显示器和弯道报警器的回测信息等,并下达控制命令,控制显示器。
2.2 KJ539-F 矿用本安型轨道运输监控基站
KJ539-F 监控基站的主要功能是实现各机车运行参数及调度管理所需数据的接收上传。KJ539-F 的输入电压为DC12 V,接收频率为2.4 GHz,天线增益可达2.5 dB,无线传输速率可达250 kbit/s。系统运行时,车载机将机车车号编码及机车调度、管理所需的其它编码信息经调制后通过Zigbee 传输至安装在巷道各监测点的基站,再经网关通过以太网传至上位机监控系统,从而使系统实时显示车号、车类等信息。
2.3 KJ539-CZ 矿用隔爆兼本安型轨道运输监控车载机
KJ539-CZ 车载机是机车运行参数及调度所需数据的采集与信号发射设备,其发射距离≥50 m,发射频率为2.4 GHz,传输速率可达250 bit/s。车载机模包含速度传感器、射频天线、报警模块等,通过射外置频天线将采集的车速、位移、车辆标识信息上传至监控基站,当机车出现超速、追尾可能时,车载机报警模块将发出相应的声光报警信号,提示车辆和驾驶员注意安全驾驶。
2.4 ZKC127Q 矿用气动司控道岔装置
根据井下运输图纸,本文设计配置地轨司控道岔装置50 套,ZKC127Q 额定电源电压为AC127 V,电压波动范围为80%~110%,最大工作电流为400 mA,设备工作时能与机车运输监控系统连接,实现岔位信号上传并实现道岔的集中监视和控制,同时实现机车车载按键遥控功能。
3 井下电机车智能调度功能设计
基于高速通信网络的建立,本文针对事故频发的岔道路段及会车路段进行调度方案智能优化设计,将巷道以岔道口为界将巷道分为若干巷段,信号灯控制器与监控基站、网关可进行无线通信,采用多信号灯联动方式为巷道不同方向行驶的电机车提供调度指示,并具备对侧闭锁、信号灯互锁逻辑控制。
针对巷道岔路口,调度指挥采用对侧闭锁模式,在距岔口某一距离时,任意一条巷道上率先出现车量,则闭锁对侧线路;如同时到达这个距离点,则按设置好的优先级由上位机自动控制信号灯开放或闭锁。为防止岔口发生车辆碰撞事故,调控上位机具备岔口处信号灯互锁功能,保证岔口处信号灯状态不同时开放。
针对巷道会车区域,系统调度指挥方案为:如会车区内有车,则系统自动控制单行道向信号灯闭锁,单行道上如有车则会车区内的车不允许出车。在紧急情况下调度员可手动设置实现闭锁,将指定区间的封锁区间占用;为防止双向单行道路会车情况出现,系统可自动或手动将同一复用区段锁死区段两端信号。
4 现场应用效果
为验证系统及方案的可行性,将系统部署于山西焦煤西山煤电东曲矿井下运输巷道中进行实际运行测试,上位机模拟监控调度画面如图2 所示。系统运行后,根据可视化模拟画面对机车运行位置及车速进行实时监测,通过系统监控操作界面可实时查看各机车设备信息状态,如车辆编号、位置及距岔口、会车区信号灯距离等,同时调度员可通过上位机远程“改变位置”操作控制机车迅速移动到该位置,实现远程智能调度;双击监控界面信号灯,可弹出包含信号灯标签、卡号及操作窗口,并可对信号灯红绿状态进行远程设置。经实际测试,系统可实现井下机车的运行监控、远程调度及车辆自动化控制,现场运行效果良好。

图2 上位机调度监控模拟画面
5 结语
本文针对井下电机车运输系统在监控及调度指挥方面的不足,设计了一套基于无线通信的井下电机车交通运输调度监控系统。系统可对电机车运行车速、车号标识、位移等数据进行实时监控,针对事故高发的岔路口及会车区设计了具有信号灯互锁、单向闭锁的调度指挥方案,并通过系统实现自动化控制,有效提高井下运输效率及安全水平。
猜你喜欢
成都信息工程大学学报(2020年5期)2020-07-29 08:50:22
小学科学(学生版)(2019年3期)2019-03-30 01:39:28
小天使·一年级语数英综合(2018年6期)2018-06-22 10:25:54
华人时刊(2016年19期)2016-04-05 07:56:05
移动通信(2015年18期)2015-08-24 07:45:08
太阳能(2015年7期)2015-04-12 06:49:50
山西大同大学学报(自然科学版)(2015年1期)2015-01-22 07:14:09
组合机床与自动化加工技术(2014年9期)2014-03-01 02:21:45
自动化博览(2014年6期)2014-02-28 22:32:16
河南科技(2014年23期)2014-02-27 14:19:00
