
基于PLC 的立体仓储控制系统设计★
2023-08-31 09:34:16程晟
机械管理开发 2023年7期
程 晟
(山西能源学院机电工程系, 山西 晋中 030600)
0 引言
《中国制造2025》的核心是创新驱动发展,主线是两化融合,主攻方向是智能制造[1]。作为智能制造的重要组成部分,柔性制造强调的是满足用工个性化需求的大规模定制。柔性制造是未来工业生产的主导模式,是将自动化生产、信息技术处理和制造加工技术结合起来,利用先进制造技术、计算机信息处理技术适应新时代的生产要求[2-3]。计算机管理的自动化立体仓库,是柔性制造系统必不可少的关键环节,其管理和控制系统结构具有较高的可靠性和稳定性[4]。自动化仓库也称为立体仓库,一般用作工业生产中流水线上的第一步或最后一步,重点解决搬运效率、产品管理等问题。自动化立体仓库是物流系统的集散地,是以高层立体货架为主体,以自动化搬运工具为基础,以计算机技术为主要手段的高效、大容量现代化储运设备[5]。
本文设计的立体仓库的结构是由货架、堆垛机和控制系统三大部分所构成,可以配合小型自动生产线,完成工件的仓储及管理,有良好的经济价值和使用价值。
1 立体仓储的结构设计
立体仓储的结构包括货架、堆垛机两部分。货架结构由12 个货架格(4×3)入货仓库和一个出入库仓位组成。其中出入库仓位中安装有光电开关传感器,以感应货物是否需要出入动作。堆垛机是立体仓储核心操作装置,其速度、精度、稳定度与仓储效率紧密联系。其运动包括两个伺服电机完成堆垛机叉货装置的水平(X 轴)和垂直(Z 轴)的定位运动,以及叉货气动装置完成工件出入库动作。具体结构如图1 所示。
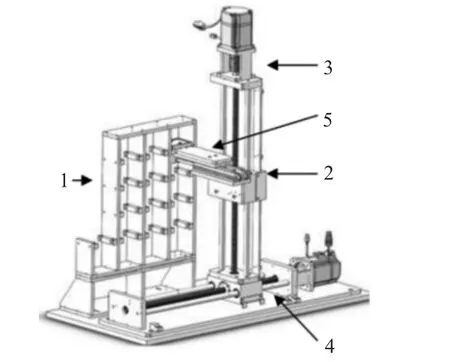
图1 立体仓储样机示意图
为了让堆垛机叉货装置在定位平面运动中实现多点停留、无级调速等功能,选择伺服电机带联轴器,连接滚珠丝杠进行传动,以保证其精度。
下面对机电传动的最主要部件滚珠丝杠选型的计算进行说明。
1.1 丝杠精度的选定
将传动设计精度的要求换算成使用丝杠长度的允许误差,确定精度等级,并根据使用条件及成本因素,选取磨制或轧制滚珠丝杠。
1.2 导程的选定
根据已知初选电机额定转速、负载的最高运行速度以及传动比,确定导程的选型条件。
1.3 丝杠支承方式的选定
丝杠支承方式由工作行程及最大运行速度条件确定。
1.4 丝杠外径的选定
丝杠外径根据轴向游隙要求以及丝杠导程,进行丝杠外径选型。同时满足条件可能有多种组合。要对满足条件的组合分别进行轴向允许载荷、丝杠临界转速计算和校核。轴向允许载荷计算主要根据摩擦力、最大加速惯性力、重力、支承方式效率等因素确定。轴向允许载荷校核是根据不同组合丝杠的直径、导程,计算其实际转速,判断是否在临界转速范围。
1.5 螺母类型的选定
根据不同组合丝杠的直径、导程,选择螺母的型号及其额定载荷。根据其外部载荷条件下的静安全系数,计算最小规格螺母允许的最大轴向载荷。根据往返加速、等速、减速三阶段运动条件,计算平均轴向载荷,分别计算不同组合螺母的额定寿命。
2 堆垛机伺服电机的选型计算
2.1 X 轴伺服电机选型
X 轴伺服电机选型,已知负载质量M;丝杠螺距PB;丝杠直径DB;丝杠质量MB;摩擦系数μ;负载移动速度v;机械效率η;全程位移时间t;加速行驶时间t1;减速行驶时间t3;联轴器质量MC;联轴器直径DC;α为角加速度;i 为传动比;TL为步进电机负载转矩。
2.1.1 计算折算到X 轴伺服电机轴上的负载总惯量
折算到X 轴的负载惯量JW:
X 轴滚珠丝杠的转动惯量JB:
X 轴联轴器的转动惯量JC:
负荷折算的总惯量JL:
2.1.2 X 轴伺服电机转速的计算
X 轴电机所需的转速n:
2.1.3 伺服电机驱动负载所需要的扭矩计算
克服摩擦力所需转矩Tf:
重物加速时所需的转矩TA1:
螺杆加速时所需要转矩TA2:
联轴器加速时所需要转矩TA3:
加速所需的总转矩TA:
计算瞬时的最大扭矩:
加速扭矩Ta:
匀速扭矩Tb:
减速扭矩Tc:
实效扭矩Trms:
2.2 初选伺服电机
初选伺服电机,伺服电机额定扭矩T 满足条件为T>Tf且T>Trms,最大扭矩满足条件为Tmax>Tf+TA。初步确定伺服电机型号,查出伺服电机惯量JM。
计算折算到伺服电机轴的总负载惯量J:
计算伺服电机启动转矩TS:
选定安全系数S,则必需转矩TM:
小惯量伺服电动机适合快速定位,当负荷与电机惯量比>5 时才考虑使用减速装置。最终决定X 轴选用小惯量伺服电动机,型号是CTSD-M14-B1012-M000,功率100 W,不带抱闸功能。
Z 轴选型计算方法和X 轴基本相同,但要考虑垂直安装时,若突然断电,由于滚珠丝杆无自锁功能,丝杠上的载物台会在重力作用下下滑,故选用带抱闸功能的小惯量伺服电动机,型号为CTSD-M16-B2012-M110,功率200 W。
3 叉货气动装置气压回路的设计
实际仓储工件质量较轻,堆垛机的出入库动作由气缸带动叉货装置完成。叉货气动装置气压回路(见图2)的控制过程是从气源出来的气体经气源三联件后,通过三位五通电磁换向阀来控制叉货装置的运动方向,经过的节流阀控制叉货装置的运动速度,通过感应磁性开关对叉货装置进行前后限位。

图2 叉货装置的气动原理
4 立体仓储控制系统的设计
1)确定采用西门子PLC SIMATIC S7-1200,其设计紧凑、成本低廉。具有脉冲串(PTO)控制接口的驱动,拥有4 路用于带脉冲接口的伺服驱动,无须位置反馈,可以进行连续的PID 控制,脉冲宽度(PWM)输出。
2)根据I/O 口分配表(见表1),需要传感器、开关等输入口18 个,伺服电机、电磁阀等输出口11 个,按照20%的余量考虑,确定CPU1214C 具体型号。

表1 PLC 的I/O 口分配
3)自动化仓库管理系统控制的处理流程,分为主程序控制流程(见图3)和叉货装置动作流程(见图4)。主程序控制流程是利用传感器、开关信号对出入库状态进行判别,通过控制X 轴、Z 轴伺服电机的使能、脉冲、方向信号,对叉货装置的水平和垂直的运动进行控制。叉货装置动作流程是根据出入库要求,对气压杠的伸出、缩回动作进行控制,微调Z 轴,保证工件顺利完成出入库动作。根据流程编写T 形图,最后对系统进行了仿真和调试。

图3 主程序控制流程
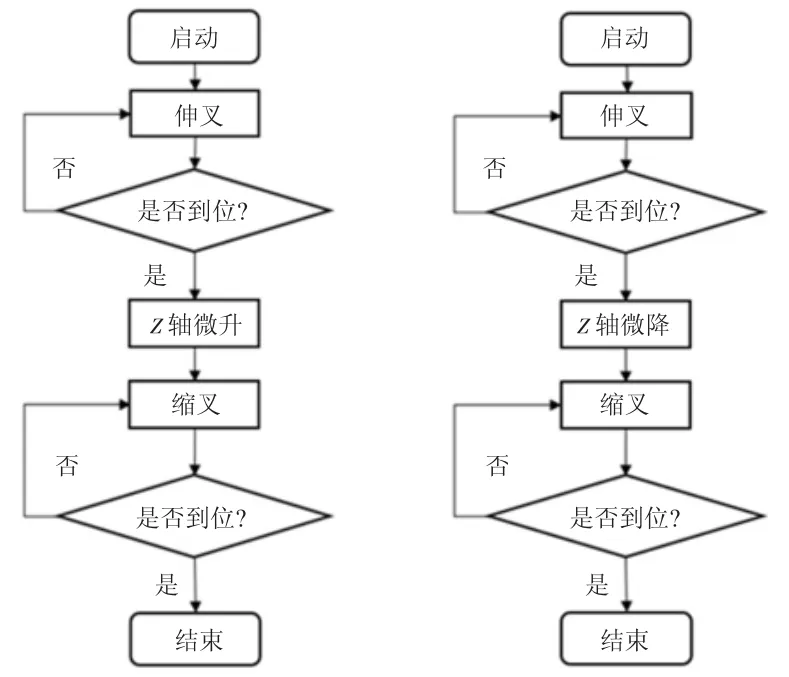
图4 叉货装置入库、出库流程
5 结语
自动化立体仓库是柔性制造系统的重要组成部分,研究和开发自动化立体仓库,对于推动柔性制造系统的发展和实用化进程具有重要意义[6]。提高出入库效率和定位精度,利于节省成本,创造经济效益,推动制造业和服务业融合成长。
猜你喜欢
现代电力(2022年2期)2022-05-23 12:46:16
现代信息科技(2021年21期)2021-05-07 02:54:12
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
酒·饮料技术装备(2018年1期)2018-04-28 09:09:07
中小企业管理与科技·下旬刊(2018年11期)2018-03-19 01:48:52
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
电子技术与软件工程(2017年5期)2017-04-23 23:19:45
上海铁道增刊(2017年2期)2017-04-18 06:50:24
制造业自动化(2017年2期)2017-03-20 14:26:07
中北大学学报(自然科学版)(2015年6期)2015-12-02 07:01:48
