
架空乘人楔形钢丝绳断绳抓捕装置的设计与仿真分析
2023-08-31 09:33:24樊嘉楠
机械管理开发 2023年7期
樊嘉楠
(阳泉煤业(集团)平定东升兴裕煤业有限公司, 山西 阳泉 045000)
0 引言
架空乘人装置俗称为“猴车”,作为煤矿生产的辅助运输装置,其主要是完成工作人员的运输任务。据统计,一般煤矿采用架空乘人装置运输人员的比例高达33%~50%。架空乘人装置在煤矿生产中的应用,极大地缩短了工作人员的升降时间,减少了工作人员的劳动强度,间接提升了煤矿的生产效率。架空乘人装置在实际运行中会出现托绳轮、驱动轮、钢丝绳等故障;此外,钢丝绳瞬间加速存在失控的现象,对架空趁人装置的安全运行带来隐患[1-5]。本文将设计断绳抓捕装置,以实现对架空乘人装置加速失控的保护。
1 断绳抓捕装置的总体设计
架空乘人装置由于其结构简单、运输效率高及安全系数高等优势被广泛应用于煤矿对人员的运输任务中。在多年的发展中,架空乘人装置已经具备了较为全面的保护功能,可实现对设备的越位保护、欠速保护、防飞车保护等功能。本文重点对架空乘人装置由于各种问题造成钢丝绳在瞬间加速过快而导致失控的问题,设计一款高可靠性的断绳抓捕装置。为了后续支撑架空乘人装置断绳抓捕装置的设计,列出对计算涉及的架空乘人装置的关键参数如表1 所示。

表1 架空乘人装置关键参数
1.1 设计原则
断绳抓捕装置作为架空乘人装置的辅助设备,所设计的架空乘人装置需遵循如下原则:
1)断绳抓捕装置不能影响架空乘人装置的正常运行,即钢丝绳可顺利通过抱索器;当出现故障时,断绳抓捕装置可及时实现对钢丝绳的抓捕功能。
2)鉴于钢丝绳在失控的瞬间会产生非常大的冲击力,要求断绳抓捕装置具备抵抗冲击力的能力。
3)鉴于煤矿井下空间有效,断绳抓捕装置应具有体积小、便于安装维护的特点。
1.2 断绳抓捕装置的整体设计
结合架空乘人装置的实际使用工况,对其正常生产工况下钢丝绳加速过快而失控的冲击力进行计算可知,所设计的断绳抓捕装置的制动力应大于23 273 N。
架空乘人装置断绳抓捕装置动作的主要依据为对钢丝绳速度的实时监测。当监测到钢丝绳速度超限时,断绳抓捕装置液压系统会驱动机械系统实现对钢丝绳的抓捕。基于上述原理,设计如图1 所示的断绳抓捕装置。
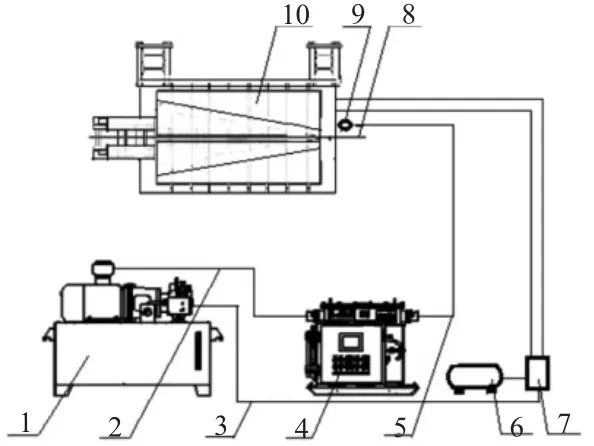
图1 断绳抓捕装置整体结构
由图1 可知,断绳抓捕装置可分为电控分系统、机械分系统和液压分系统,机械分系统为装置的执行机构,液压分系统为机械分系统的抓捕力提供动力。
2 断绳抓捕装置的详细设计
本节重点对断绳抓捕装置的机械分系统和液压分系统进行设计。
2.1 断绳抓捕装置机械分系统的设计
针对钢丝绳的抓捕需求,本装置采用楔形自锁结构的形式实现对钢丝绳的抓捕功能。楔形自锁机构的简图如图2 所示。
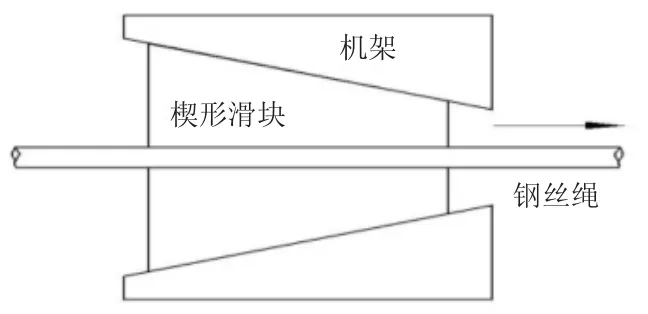
图2 楔形自锁结构
由图2 可知,为了保证楔形滑块能够准确及时地实现对钢丝绳的抓捕功能,重点需要根据“断绳抓捕装置的制动力应大于23 273 N”这一要求,确定楔形滑块的倾角。已知:钢丝绳与楔形滑块之间的滑动摩擦系数为0.35;楔形滑块与机架之间的滑动摩擦系数为0.1。对应的楔形滑块倾角θ 计算如式(1)所示。
式中:μ1为钢丝绳与楔形滑块之间的滑动摩擦系数;μ2为楔形滑块与机架之间的滑动摩擦系数。
将上述参数代入式(1)中,得出楔形滑块的倾角应小于13.6°。
2.2 断绳抓捕装置液压分系统的设计
为了保证架空乘人装置在钢丝绳失控后断绳抓捕装置能够快速响应,并完成迅速制动的功能,本装置采用机电液联合控制,并采用液压系统为机械楔形机构提供动力。对于液压系统而言,不仅要保证其能够提供足够的动力,更重要的是其能够对抓捕动作快速响应。因此,在液压分系统中采用差动式的结构,该结构能够提供液压系统中活塞杆的移动速度,从而实现对钢丝绳的快速抓捕。断绳抓捕装置液压分系统原理如图3 所示。

图3 断绳抓捕装置液压系统原理
3 断绳抓捕装置抓捕性能仿真分析
根据所设计的断绳抓捕装置结构,基于ADAMS软件建立数值模拟仿真时间,重点对该装置在钢丝绳出现超速情况下对其的抓捕响应时间进行仿真分析。在模型中,尤其注意钢丝绳与楔形滑块之间滑动摩擦系数、楔形滑块与机架之间滑动摩擦系数的设置。仿真条件设置:设定钢丝绳的初始速度为1.5 m/s,模拟架空乘人装置遇到故障出现钢丝绳速度超限的工况,并对其抓捕性能进行仿真分析,对应的钢丝绳的速度变化仿真结果如图4 所示。

图4 钢丝绳速度变化仿真结果
由图4 可知,架空乘人装置在实际运行中由于某种原因导致其速度在短时间内超出其限值,并达到3.1 m/s。在此情况下,断绳抓捕装置迅速动作,并在速度达到最高值0.08 s 后将钢丝绳的速度降为0,达到对钢丝绳及时抓捕的效果。
4 结语
架空乘人装置为煤矿生产中对人员进行运输的关键设备,其间接提升了煤矿综采工作面的生产效率。在多年发展中,架空乘人装置的保护功能已经逐渐全面,其安全性也较高;但是,缺乏对钢丝绳的断绳抓捕功能,即对钢丝绳超速的现象无法保护。为此,本文以楔形机械结构和差动式液压系统为核心设计了能够快速响应、抗强冲击力的断绳抓捕装置。经仿真分析表明,所设计的断绳抓捕装置能够在钢丝绳速度超限至最高值后0.08 s 内实现对钢丝绳的制动,即完成对钢丝绳的抓捕功能。
猜你喜欢
机械管理开发(2022年3期)2022-05-14 02:49:30
当代作家(2021年10期)2021-11-09 23:12:00
作文小学高年级(2020年11期)2020-12-29 09:27:39
考试与评价·高二版(2020年1期)2020-09-10 23:34:28
中国特种设备安全(2019年11期)2020-01-16 08:06:14
阅读与作文(英语高中版)(2019年8期)2019-08-27 03:59:11
临床医药文献杂志(电子版)(2017年11期)2017-05-17 04:48:17
中国塑料(2015年9期)2015-10-14 01:12:35
河南科技(2015年2期)2015-02-27 14:20:28
河南科技(2014年15期)2014-02-27 14:12:36
