
某矿山三维激光扫描测量系统高效应用方法研究
2023-08-24 17:39何玉龙
现代矿业 2023年7期
何玉龙
(山东黄金矿业(莱州)有限公司三山岛金矿)
大直径深孔采矿法[1-3]具有空区结构合理,工作效率高,工艺先进,单次出矿连续、集中、安全等特点,在我国矿山得到广泛应用。该方法能有效提高采空区作业能力和工作效率,适合于开采中厚以上、矿岩较稳固、形态较规整的矿体。潜孔钻机在钻孔的过程中,随着深度的加大,钻孔的质量越来越难以控制,导致钻孔偏斜,进而影响采空区的爆破效果,形成超爆、欠爆。
为了解决该问题,本文以某矿山作为试验场地,采用矿用三维激光扫描仪对矿山各中段采空区进行现场扫描,并分析后续数据,得出采空区超爆、欠爆尺寸,同时可以为后续二步骤回采爆破设计优化提供数据基础。
1 矿山概况
某矿山是多矿种组成的大型硫铁矿,部分伴生铜矿。矿体整体在水平面上投影为椭圆形,中间以贫铁矿为主,四周环绕富的厚矿体。由于-540 m 水平以上2#纵勘探线以北的矿体平均厚度大于35 m,因此采用垂直深孔阶段空场嗣后充填采矿法。
基于矿山生产规划,以盘区为单元进行划分组织生产。每个盘区走向长126 m,垂直走向90 m,盘区间沿垂直走向方向布置宽18 m 的矿柱,联络巷布置在矿柱中。每个盘区划分7 个采场,采场长度为72 m,宽度为18 m,矿体厚度为每个采场的高度。由于开采后两端边帮的爆破效果无法直接获取,且整个采空区空间较大,人员不允许直接进入,不利于后续二步骤回采和爆破设计。为了解决该问题,使用矿用三维激光扫描仪对-540~-455 m 水平已经开采采空区进行扫描,探测采空区具体形态。
2 三维激光扫描测量系统应用研究
2.1 应用工况
矿用三维激光扫描测量系统可以非常直观、高效地扫描采空区,生成采空区三维形态,可进一步指导后续的采矿作业[4-10]。但是根据矿山现场情况,简单地使用矿用三维激光扫描测量系统进行扫描可能达不到最优效果,为了解决该问题,需要针对具体应用场景,提炼具体使用方法。
(1)采空区群扫描。由于采矿方法不同,形成的采空区形态和规模不尽相同。采用大直径深孔采矿方法形成的大型空区形态规整,能够提供的测量区域多,可以直接把延长杆伸入到采空区进行扫描。矿柱法采矿形成的采空区群,内部存在很多保安矿柱,使用矿用三维激光扫描测量系统任意布点进行扫描效果不佳,且需要扫描很多次,但是在扫描前,通过合理布点,效率会有很大提升。
(2)溜井扫描。矿山溜井是矿石下放的主要通道,由于长时间使用,很多矿山溜井内部都发生损坏,为了探明溜井内部情况,需要对溜井进行扫描,但是溜井长度基本上都在200 m 以上,简单扫描测量不能完全扫描溜井内部形态,为了让矿用三维激光扫描测量系统能够适应溜井形态扫描,需要总结并加工适合溜井扫描的装置,可以通过电动绞车、钢丝绳、固定装置等方式解决。
(3)未知采空区扫描。矿山在开采过程中,由于各种原因,存在很多未知采空区,直接使用矿用三维激光扫描测量系统进行扫描,存在安全风险,为了有效摸清这些采空区具体情况,需要结合物探方式一起探测。
2.2 点云数据预处理研究
矿用三维激光扫描测量系统扫描采空区后形成空间点云数据,点云数据需要进行预处理才能转化成矿山需要的数据,具体数据预处理流程如下。
2.2.1 点云数据拓扑关系的建立
空区点云数据的重建及预处理主要受到点云领域搜索速度的影响,三维散乱数据最近领域的搜索速度与其组织结构和搜索算法的性能有关。常用的点云数据拓扑关系的建立方法有八叉树法和KDTree法。
(1)八叉树法。八叉树的构造流程如图1 所示。将在点云空间三维方向上尺度空间分布均的8 个子集,用相同的规律进行分割,直到各子集边长小于Lmin或者是各子集只有一个点为止。

(2)KD-Tree 法。基于KD-Tree 的点云拓扑关系组织方法不同于八叉树的方法,八叉树用于三维空间的切分,而KD-Tree 可进行任意维的切分,主要用于最近点的查找。三维空间生成KD-Tree的过程,排列K 维空间,可按数据范围最大的一维进行分割,以此类推,直到叶子结点包含一个数据点。KD-Tree构建过程如图2所示。
2.2.2 点云去噪处理
点云去噪用于点云的精准表示,处理点云数据中噪声点,尽可能避免测量误差进一步扩散,利于后续的三维重建、配准及形变分析等处理工作。
提出一种基于KD-Tree的离散噪声点去除方法,利用统计原理,通过计算点与邻域各点距离的均值μ和标准差σ,设置阈值μ±α·σ,如果邻域中某点的距离不在此区间,则认为该点为噪声点。算法实现流程如图3所示。
2.2.3 点云精简
由于空区三维激光点云数据规模较大,后续数据处理存在较大的时间和空间复杂度,基于包围盒的点云数据简化算法主要解决大规模点云数据精简,该算法改进了传统的点云精简方法,考虑点云局部信息,筛选出可以代表局部最大信息量的点云,能够保留点云细节特征,如点云曲率变化大的区域的特征等。
算法步骤如下:
(1)设置最小包围盒的尺寸,对点云数据建立包围盒数据结构。


(2)计算每个最小包围盒距离中心最近的点作为中心点p0。
(3)计算最小包围盒中所有的点pi到中心点的p0距离di。
(4)计算距离D=(d1,d2,...,dn)的均值μ和标准差σ。
(5)判断如果某个点的距离di是否在区间μ±α·σ中,如果在区间中,说明这个点跟当前点具有相似的性质,则将其去除;如果不在区间中,说明该点与当前点有较大差异,具有与当前点不同的信息,应该保留。α的取值根据包围盒的大小来决定。
算法流程如图4所示。

2.3 点云数据多站拼接应用技术研究
部分采空区由于体积大、存在遮挡等原因,导致使用矿用三维激光扫描测量系统不能一次完整测量出其空间形态,需要在多个测量地点进行扫描,最后通过点云拼接技术完成整个采空区的空间形态。
多站拼接扫描并不代表在所有的测量点进行扫描,而是需要根据现场实际情况做到扫描次数最少、扫描效果最好。使用矿用三维激光扫描测量系统进行拼接扫描时,需要测量技术人员提供扫描系统的坐标、方位角,现场人员在实际扫描时需要确保坐标、方位角的精度,这样才能确保拼接数据无缝衔接。
选择某矿山作为试验地点,由于该矿山采空区较大,一次三维激光扫描并不能完整地反映采空区的形态。为了得到该矿区采空区真实形态,选择2个进矿出路进行扫描测量,然后利用矿用三维激光扫描仪的点云拼接功能进行拼接。
2.4 地下采矿空间高精度报量方法研究
矿用三维激光扫描测量系统提供体积块体报量功能,但是如何确保体积报量满足现场精度要求,需要开展系统研究。
2.4.1 开展块体体积报量原理研究
通过点云数据三维重建的实体模型不能使用数学表达式表达,因此不能通过数学的方式进行体积计算。为了解决体积报量的问题,研究通过块体报量的方式,其原理是获取被测物体的最大包围盒信息,建立被测物体的八叉树结构,根据需要报量的精度,逐步细分八叉树结构,使八叉树最后一层叶子节点包含的块体大小满足系统的精度要求。使用小方块去充填三维实体,最后统计块体体积,为了使块体报量更加精确,在实际研究过程中引入了次级块的概念,该次级块的大小在原先设置的块体大小下进一步缩小,但是次级块只在最外一层进行使用,这样既可以保证系统体积计算精度,又可以保证体积计算效率。
块体模型建立流程:将一个采空区扫描模型调入图形区,运行菜单项块体—创建—建立块体模型,设置完成后点击确定,即完成块体模型的建立。块体模型建立好后,程序自动弹出“块体模型显示”对话框,设置显示块体模型的颜色和显示风格,即可显示出块体模型。具体步骤可参考块体—显示—显示块体模型功能。
2.4.2 开展多个拼接实体的块体体积报量研究
使用多站拼接扫描获得点云数据肯定会存在部分重叠区域,最后形成的三维实体模型必然存在重叠区域,如果直接使用块体充填的方式,最后计算的体积会存在重复计算的问题,为了避免该问题出现,需要对重叠区域进行布尔运算,保证重叠区域数据只会计算一次。
2.5 二步骤回采优化技术研究
利用矿用三维激光扫描测量系统可以充分获取采空区的三维形态,但是根据扫描的点云数据不能直接精确的获取采空区回采贫化、损失等技术参数,无法为后续二步骤回采提供指导。针对该问题,需要开展以下研究:
(1)开展采空区三维模型建立技术研究。矿山在开采之前,会通过CAD 软件设计采空区开采平面图,得出不同中段的采空区设计边界。但是这些采空区设计图纸是二维的,无法与扫描形成的三维模型进行对比,需要把采空区二维图形转化成三维模型。
(2)开展超采、欠采区域分析研究。通过对比采空区设计三维模型和扫描点云形成的采空区实际三维模型,可以非常直观准确地体现哪些区域发生超采、哪些区域发生欠采。根据2 个模型的对比结果,可以把发生超采、欠采的区域提炼出来,并通过不同高程剖切技术,形成不同高程的二维对比图纸,可以精确地分析超采、欠采尺寸,为后续二步骤回采提供依据。
3 采空区三维扫描方案
3.1 测量设备概述
选用矿冶集团自主研制的BLSS-PE 系统,主要包括三防笔记本、电源箱、扫描主机、延长杆、三脚架适配器等,该系统量程、测量精度和扫描角度等参数能够满足此次采空区的精细测量要求。
3.2 测量方案
根据采空区的分布情况,其中19-3、21-2、23-2、25-2 采场凿岩工作在-455 m 水平进行,因此考虑到测量安全及测量条件限制,4 个空区的测量位置布置在-455 m 水平;51-4、51-5,53-5、53-4、27-4、29-4、45-3、47-3 8 个采空区的测量位置布置在-508 m 水平。由于采空区形态都比较规整,且采空区上部都有测量巷道,视野非常好,每个采空区进行1 次测量后就可以完整地扫描整个采空区形态。现场具体的测量方案见表1。

4 测量结果及数据分析
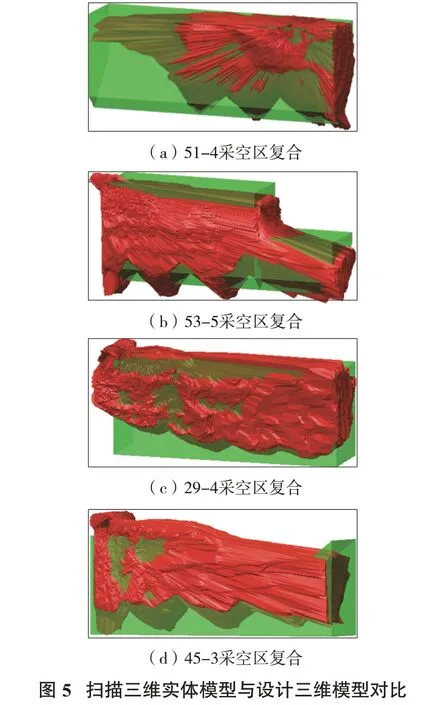
4.1 扫描模型与设计模型复合
为了确定采空区两端边帮超爆和欠爆的情况,将采空区设计的三维模型和扫描得到的三维模型进行复合,通过对比可定量得到采空区具体位置发生超爆欠爆的量。通过对采空区点云数据的处理,可以得到采空区三维实体模型,再将其和设计平面图三维建模的模型进行复合,部分复合效果图如图5所示,深色部分为扫描三维实体模型,浅色为设计三维模型。
4.2 采空区爆破效果分析
为了给后续爆破设计提供精确的数据,同时也为了定量反映采空区超爆、欠爆的情况,将复合的采空区三维模型沿着炮孔的布置方向进行划分,部分结果如图6所示。
通过对复合模型采空区剖切的结果和采空区超爆、欠爆结果的定量分析可以看出,25-2 采空区北侧边帮爆破效果良好,而23-2 采空区南侧边帮则存在超爆的现象。后续在进行二步骤回采时,需要防止24-2采空区北侧边帮炮孔打眼时进入23-2采空区的充填体内,同时根据定量分析的采空区超爆现象对装药量进行调整,从而达到精准化爆破的目的。
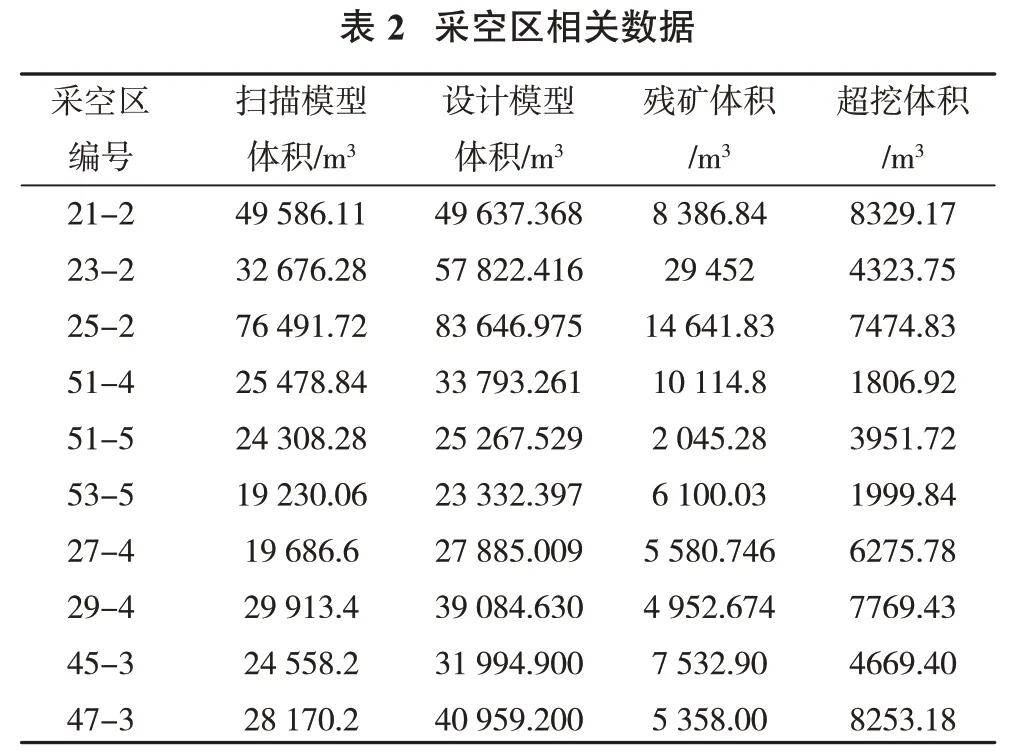
4.3 采空区爆破效果定量计算
前期通过数据处理后,可以非常直观地掌握所有扫描采空区的形态、爆破效果,但是这些都是定性的结果,而各个采空区的体积、超挖、残矿情况,需要通过块体模型进行定量计算,计算结果见表2。

5 结论
(1)根据研究内容,对采空区进行扫描,真实反映了现场采空区形态,为矿山后续生产提供了数据基础。
(2)凝练了矿用三维激光扫描测量系统高效应用方法研究,为发挥该系统的最大技术优势提供了指导思路。
(3)开展复杂地下采矿空间点云数据预处理研究,并结合实际扫描的数据进行了点云数据去噪、线框模型形成、点云三维建模。
(4)开展基于块体分割的地下采矿空间高精度报量方法研究,通过块体模型报量方法,定量计算了采空区体积、超挖量、残矿量,为矿山了解采空区各项指标提供了定量数据。
(5)开展采空区爆破设计优化研究,结合采空区扫描模型和三维设计模型,得出一步骤、二步骤回采的采空区边界情况,进而为第二步骤、第三步骤回采爆破设计优化提供依据。
猜你喜欢
河北地质(2022年2期)2022-08-22
资源信息与工程(2021年5期)2022-01-15
水运工程(2020年11期)2020-11-27
电子制作(2017年17期)2017-12-18
制造业自动化(2017年2期)2017-03-20
上海金属(2015年3期)2015-11-29
江西煤炭科技(2015年4期)2015-11-08
中国科技信息(2015年21期)2015-11-07
新疆钢铁(2015年2期)2015-11-07
橡胶工业(2015年10期)2015-08-01
