太阳能清洁装置设计*
——为碳中和护航的太阳能清洁使者
2023-08-22 04:15苏文华王学军孙长勇耿欣宇初津宇
南方农机 2023年17期
苏文华 ,王学军 ,孙长勇 ,耿欣宇 ,初津宇
(山东华宇工学院机械工程学院,山东 德州 253000)
0 引言
随着全球经济的高速发展,人们越来越重视资源的利用率和使用寿命,节约资源受到全世界的关注,现在更多是利用可再生资源。关于提高太阳能资源利用率的研究也成为维持光伏发电站效率的关键。
龚芳馨等[1]分析了太阳能板附着灰尘的特性,着重阐述了一种适合大型光伏电站的车载清洗机的原理与工作方式,并对大型光伏电站的太阳能板的清洁技术的发展方向和趋势进行了探讨。任建龙等[2]对清扫吸储装置的机械结构设计及控制方法进行阐述,并对实验后的结果进行建模分析,验证了清扫吸储装置清洁效果的可靠性。李伟等[3]设计了一款太阳能光伏基板清扫装置,实现太阳能光伏基板的垂向和纵向清扫,该装置能自由切换两种不同的模式,应对不同工况,达到自动扫除灰尘的效果,能够提高清扫效率、降低人工成本,脱离水清洗的弊端。王超[4]设计了一款基于嵌入式微处理器的太阳能电池板清扫机器人,此机器人通过清扫机构、行走机构、清洗机构等,完成对太阳能电池板的自动清扫。
第十三届全国人大四次会议政府工作报告中指出,扎实做好碳达峰、碳中和各项工作,制定关于2030年前碳排放达峰的行动方案,优化产业结构和能源结构,推动煤炭清洁高效利用,大力发展新能源。在此大背景下,一种兼顾生态修复、解决并网、消纳隐忧同时保障安全、高效运营的“友好型光伏电站”发展理念正在重新构建。应适时对光伏电池板进行周期性清洗,以保证太阳能光伏电池的正常运行[5]。太阳能光伏板智能清洗机器人是随着智能制造技术的不断发展而产生的,其根据光伏板的倾斜角度而设计,便于机器人在倾斜的光伏板上行走,同时完成往返清洗工作。根据清洁质量,此类机器人具备干洗、水洗和吹干等功能,其自动化程度也在不断提高。
本设计是基于STM32 单片机控制的一种智能化程度高、综合能力强的太阳能板清洁机器人,是能够清洁太阳能面板表面灰尘、污染物和鸟禽粪便的清洁机器人,可以提升光伏面板的光电转化效率,并进一步提高光伏电站的经济效益。在使用过程中,机器人通过电机驱动履带行走、切换干洗或水洗模式,实现全方面覆盖清洗、智能启停等功能,能够根据外界环境的光线变化和边界距离进行智能化控制。在清洗过程中,采用喷淋或吹气装置使打扫过程的覆盖区域更加广泛,用水成本更低,而尼龙丝毛刷辊采用螺旋结构以及差速转动能提高机器人清扫的清洁度,以维持光伏发电站的发电效率,解决现在越来越严重的资源匮乏问题。
1 清洁装置设计
1.1 清洁装置组成
该清洁装置包括机械部分和控制部分。机械部分主要包括履带行走机构、导向轮、清洗滚轴、驱动电机及减速器等。控制部分包括控制系统、传感系统、驱动系统、清洁系统等。
1.2 设计功能
1)机械部分采用铝合金框架,避免设备锈蚀,减轻自身重量;2)控制系统采用具有高可靠性和高运行速度的嵌入式系统;3)根据太阳板所处区域环境情况,选择干洗和水洗两种模式;4)设计光照检测系统,便于控制机器人及时工作;5)设计行程开关,便于控制机器人反向移动或停车;6)选用直流减速电机进行整机驱动,抗干扰能力强,动态响应比较快速;7)采用锂电池作为设备电源,保证机器人可持续工作。
1.3 具体实施措施
1.3.1 机器人履带式行走机构设计
1)机器人通过张紧轮调节履带松紧,利用支撑轮和引导轮控制橡胶履带的正常工作,由电动机和齿轮传动机构带动驱动轮控制橡胶履带行走。为了保证履带克服阻力,正常行走,选择宽面橡胶履带。机器人通过电机驱动橡胶履带行走、切换干洗或水洗模式,实现全方面覆盖清洗、智能启停等功能,能够根据外界环境的光线变化和边界距离进行智能化控制[6]。
2)引导轮的尺寸大小主要考虑到当前太阳能电池板安装的阵列间隙以及行走速度和清洗速度的差值,引导轮D1~D8 尺寸、齿数、材料情况如表1 所示。
3)侧边导向轮设计。侧边导向轮的作用:为防止机器人执行清洗任务时,由于自身重力向下滑落,所以在它的两旁加了侧边导向轮,导向轮可以在太阳能电池板的侧面进行滚动,承载太阳能电池板清洗机器人由于自身重力产生向下滑动的垂直于太阳能电池板侧面的力,即重力对太阳能板方向的余弦分力。侧边导向轮选用包胶轮,包胶轮采用聚氨酯包胶,吸振性能更好,耐机械冲击性能较强,具有强度高、刚性好、不易产生形变、抗冲击能力强、抗振性强等优点[7]。清洗机器人结构图如图1所示。

图1 清洗机器人结构图
1.3.2 控制装置设计
本系统通过蓝牙串口传输信号,通过蓝牙控制上位机调节装置,控制清洗模拟光伏板的演示板,其实际应用价值高于传统的人力清洗,相比新型的自动化清洗更加省时省力。本研究设计的蓝牙控制功能能够保证清洗效率,能够有效解决自动化清洗不彻底等问题,并通过上位机对设备进行控制,使模拟光伏板的演示板具有更高的实际应用价值。
1)控制系统:选用STM32 单片机作为机器人的核心部位,根据实际情况对核心控制器输入指令,控制器STM32 会输出PWM 控制信号作用于直流电机的控制电路,控制直流电机的驱动以及调速,从而完成对清洁机器人的清扫系统毛刷的驱动和行走系统行走轮的驱动。
2)传感系统:包括光照检测模块和边界检测模块。光照检测模块中光敏电阻器选用TELESKY,因为该传感器有信号清晰、波形好、驱动能力强等优点。光照检测模块检测环境光线强度,傍晚来临的时候,当周边环境的光线强度减小到特定数值时,太阳能板清洁机器人才会进行工作[8]。边界检测模块使用欧姆龙限位开关D4N-212G 的行程开关,这是一种单轮自动恢复行程开关。要想实现边界条件控制,则当机器人清洗完一片区域的太阳能电池板时,安装在侧边的限位开关向下运动,输出低电位,机器人停止工作。
3)驱动系统:采用直流电机进行整机驱动,直流减速电机额定电压为24 V,在减速齿轮减速下可以满足所设计的清洗速度并驱动整个清洗机器人完成清洗过程。该减速电机带有刹车装置,在清洗机器人清扫完毕返回停车位或到达光伏太阳板组件边界时可以更好地进行停车。
4)清洗系统:主要分为喷淋(吹气)装置和清扫装置。清洗机器人机械部分结构图如图2 所示,由PVC 管或镀锌管构成,管上安装雾化喷嘴[9]。清洗机器人进行工作任务时,会从管的一端进水(压缩空气),自动打开雾化喷嘴,对各自区域内的太阳能电池板进行喷淋(吹气)工作,喷淋(吹气)装置较于传统人工冲洗,覆盖区域更加全面,用水总量是人工冲洗的四分之一,减少了清洗成本,节省了水资源。清洗系统结构及作业过程如下:①清洗滚轴采用尼龙丝毛刷辊。由直流电机和减速器驱动,同步轮的齿数通过同步带传动设计,使其清洗机构和行走机构形成差速传动。尼龙丝毛刷辊采用螺旋结构以及差速转动能使清洗机器人提高清扫的清洁度。②清洗模式的转换是根据太阳板所处区域来选择,如果区域水源充足可以选用喷淋或喷雾,如果水源不充足可以选用高压气体吹除。③选用直流伺服电动机作为机器人的动力源,便于机器人的移动和清洗滚筒装置的正常工作。④选用24 V 的铁锂电池作为机器人的电源,并设置有充电孔,保证机器人续航时间达到2 h(一个阵列的光伏板组件长度为200 m)。
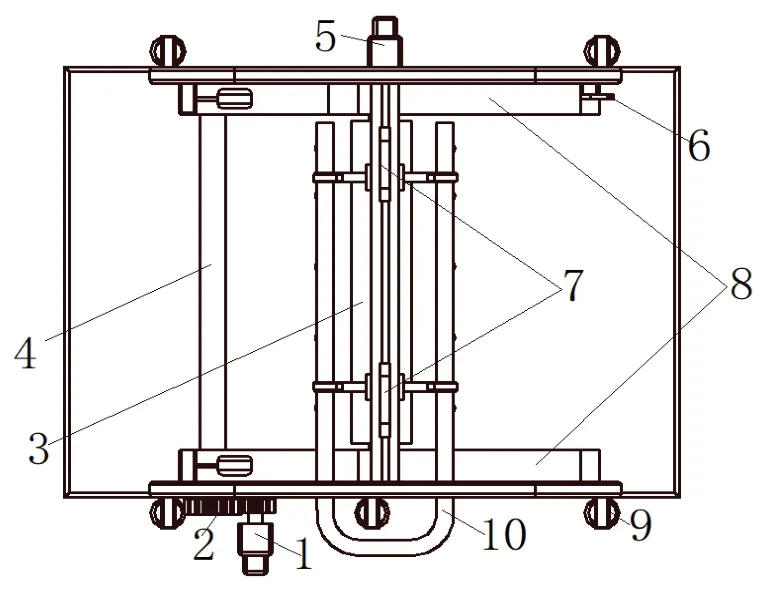
图2 清洗机器人机械部分结构图
1.4 技术路线
机器人控制硬件电路包括STM32 单片机、PWM电机驱动电路、整机电源、直流电机、传感器等。STM32 单片机是清洗机器人的核心控制器,通过外界环境对核心控制器发出指令,控制直流电机的驱动和调速,从而完成对清洗机器人的清扫系统毛刷的驱动和行走系统行走轮的驱动,而核心控制器STM32输出PWM 控制信号作用于直流电机的控制电路。整机电源为STM32 单片机、控制电路、除尘过程中所需的传感器以及直流电机提供电源。机器人工作流程图如图3所示。

图3 机器人工作流程图
太阳能板清洁机器人的设计,可以减轻人工的劳动强度,提升清洁质量,多种模式的转换,提高了清洁效率。太阳能板清洁机器人的应用为碳中和的实施提供了便利条件,改善了人工作业环境,降低了光伏电站造价。
2 应用前景
本系统基于STM32 单片机控制,智能化程度高、操作方便简单,同时在对太阳能电池板清洁的基础上,最大限度地利用太阳能,以达到清洁的目的,可以应用于各种不同环境中的清洁工作。控制清洗机器人只有在光线环境较弱情况下才工作,因此不影响光伏太阳板的正常发电。相较于现有的清洁装置,该装置配备了喷淋、吹气两种方式,可以对不同情况的光伏电板所在区域进行针对性的清洁工作,大大节省了水资源[10]。本产品配备24 V 的铁锂电池作为机器人的电源,并设置有充电孔,保证机器人续航时间达到2 h,大大提高了产品的工作时间和耐用性。随着我国经济的不断发展,在“碳达峰、碳中和”的目标下,以光伏为主导的太阳能产业被赋予高增长、高景气度的成长空间[11]。随着太阳能装机容量的增加,电站运维问题逐渐凸显,其中积灰问题最为严重,灰尘的覆盖大大降低了太阳能组件的发电效率,成为太阳能发展最大的障碍。现有的太阳能板清洗方式水资源消耗大、效率低下、清洗成本高,需要不断创新太阳能清洁装置的开发设计,提高装置的质量,只有这样才能真正地提高工作效率。本研究设计的装置可以提高资源的利用率,减少浪费,实现理想的工作成果,有巨大的发展潜力。且随着现代社会的发展,人们越来越注重资源节约等问题,所以本清洁装置具有广阔的发展前景。
3 结语
综上所述,本装置由履带行走机构、导向轮、清洗滚轴、驱动电机及减速器、控制系统、传感系统、驱动系统、清洁系统等组成,通过STM32 单片机控制,达到清洁太阳能面板表面灰尘、污染物和鸟禽粪便的目的,可以提升光伏面板的光电转化效率,并进一步提高光伏电站的经济效益。在使用过程中,机器人通过电机驱动履带行走、切换干洗或水洗模式,实现全方面覆盖清洗、智能启停等功能,能够根据外界环境的光线变化和边界距离进行智能化控制,达到节约资源的目的。
猜你喜欢
大电机技术(2022年5期)2022-11-17
军事文摘(2021年18期)2021-12-02
新能源科技(2021年8期)2021-04-02
中国石油石化(2021年8期)2021-03-30
石油化工建设(2019年6期)2020-01-16
知识就是力量(2017年12期)2018-01-15
石油化工建设(2017年2期)2017-06-05
电子制作(2017年1期)2017-05-17
电源技术(2015年2期)2015-08-22
淮南师范学院学报(2015年3期)2015-03-22