
改进梯度下降法在地下管道惯性定位姿态解算中的应用
2023-08-21 09:39:37张楠崔厚坤徐伟周
无线互联科技 2023年12期
张楠 崔厚坤 徐伟周
摘要:针对地下管道惯性定位姿态解算传统算法存在效率较低、最优参数难以确定等问题,文章提出了一种自适应调节参数的梯度下降法。该方法将加速度计、陀螺仪和磁力计的数据进行融合,并自动调节梯度下降参数,实现了四元数姿态信息的更新。试验结果表明,该方法解算横滚角和俯仰角的精度与传统梯度下降法一致,航向角的精度有11.2%的改善,计算效率相对于扩展卡尔曼滤波方法有50%的提升。
关键词:姿态解算;四元数;梯度下降法;地下管道;惯性定位技术
中图分类号:TN911.7 文献标志码:A
0 引言
为满足城市建设的需要,城市上空的架空线也逐步被电力电缆线路所替代。作为城市基础建设的重要组成部分,电力电缆等地下管线竣工图是城市基础设施维护、管线设计、管线数字化管理和维护的重要基础资料。电缆通道三维位置信息的获取是首要工作,传统非开挖管线三维位置信息采集一般采用金属管线探测仪,探测精度较低且易受环境干扰[1],电缆通道常采用非开挖定向穿越[2],其较大的埋深往往导致传统的管线探测技术失效。惯性定位技术可以在非开挖条件下直接测定电缆通道的三维坐标,不受管道材质类型和埋深的约束,同时不受电磁干扰和地质条件的影响,在各类地下非开挖非封闭管线测量中得到了广泛应用[3-6]。在地下管道惯性定位中,高端设备往往采用高精度的战术级惯性测量单元(Inertial Measurement Unit, IMU),以期望获得准确可靠的定位结果。实际应用中,战术级IMU的成本过高,同时其尺寸过大导致无法应用于小口径管道,因此小口径管道测量一般采用体积小巧、成本较低的微机电(Micro-Electro Mechanical Systems, MEMS)惯导器件[7]。
获得精确的姿态解算信息(横滚角、俯仰角、航向角)保证惯性定位精度的重要前提条件,但由于MEMS传感器制造工艺的限制,陀螺仪和加速度计在使用时需要进行标定处理,补偿零偏和标度因素等误差,实际应用中必须选取计算量小、精度高、实时性强的姿态解算方法。扩展卡尔曼滤波(Extended Kalman Filter, EKF)是一种常用的姿态解算算法,其不足是每次迭代时计算的复杂度相对较高,导致计算量较大,并且确定合适的量测噪声协方差矩阵较为困难[8-9]。互补滤波法的精度低、姿态漂移严重[10-11],应用受到限制。传统的梯度下降法在不同环境下往往难以确定最优步长[12-13],对于强机动、高动态的飞行器,如四旋翼无人机,针对不同的飞行状态通过灵活调梯度下降法的梯度步长,可以显著提升姿态估计系统的抗干扰性[14-15]。
与飞行器高动态运动状态下姿态信息变化快速的特点不同,在电缆通道等地下管线的惯性定位中,MEMS传感器在牵引器的拉动下在管道中低速运动,其姿态变化较为缓慢。针對这一特点,本文提出一种改进的梯度下降法用于MEMS传感器姿态解算,其梯度下降参数可自适应调节。 本文结合实验分析了该方法的计算效率和计算精度,为地下管线惯性定位的工程实用提供参考依据。
1 姿态描述方法
1.1 欧拉角法
姿态描述了导航坐标系与载体坐标系之间的相对旋转关系,欧拉角法是描述姿态的常用方法之一。两种坐标系之间的旋转关系可以由载体坐标系依次绕3个轴转动3个角度来确定,用横滚角、俯仰角θ和航向角ψ三个欧拉角表示的载体坐标系和导航坐标系之间的坐标转换矩阵Cbn:
3 试验与分析
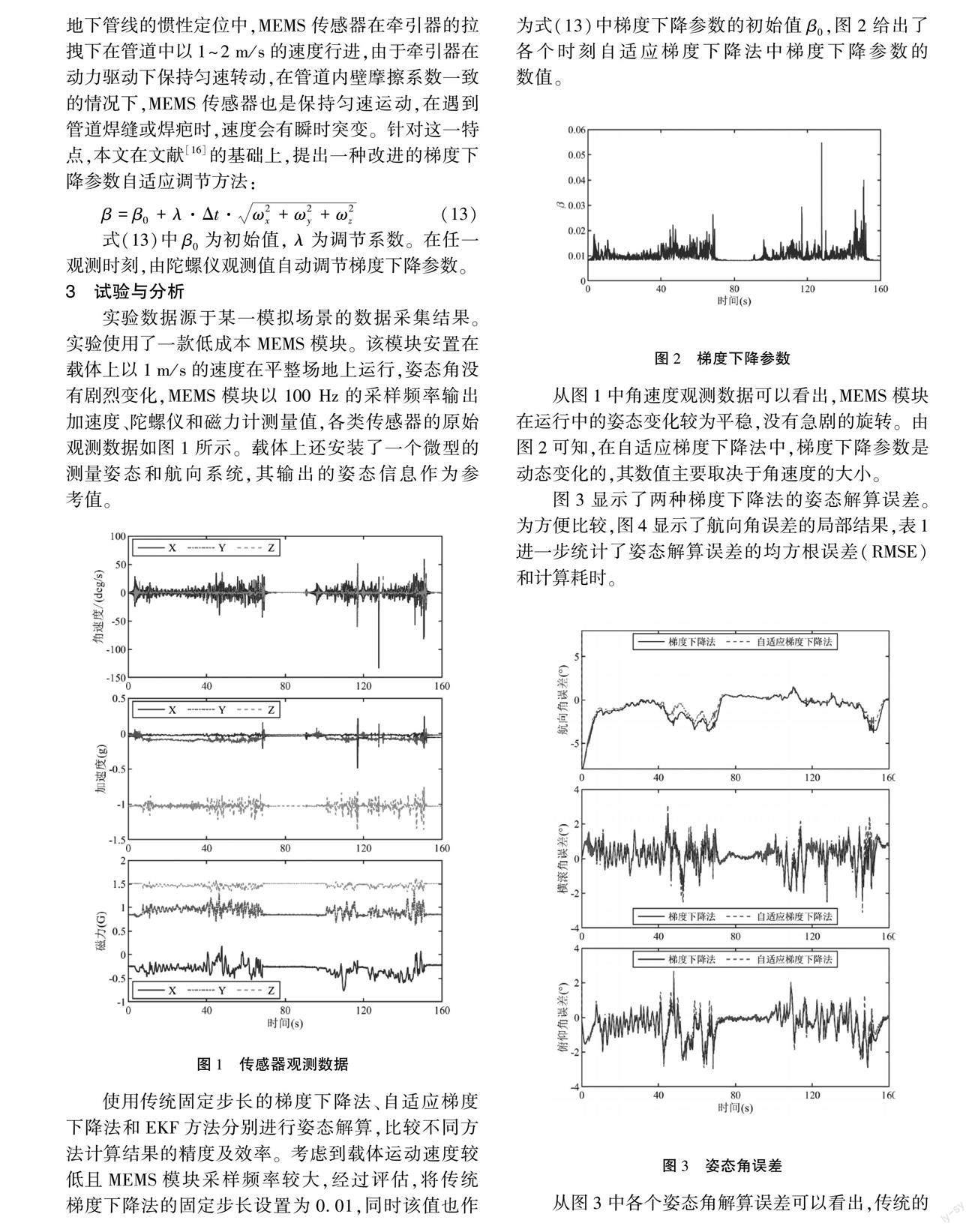
实验数据源于某一模拟场景的数据采集结果。实验使用了一款低成本MEMS模块。该模块安置在载体上以1m/s的速度在平整场地上运行,姿态角没有剧烈变化,MEMS模块以100 Hz的采样频率输出加速度、陀螺仪和磁力计测量值,各类传感器的原始观测数据如图1所示。载体上还安装了一个微型的测量姿态和航向系统,其输出的姿态信息作为参考值。
使用传统固定步长的梯度下降法、自适应梯度下降法和EKF方法分别进行姿态解算,比较不同方法计算结果的精度及效率。考虑到载体运动速度较低且MEMS模块采样频率较大,经过评估,将传统梯度下降法的固定步长设置为0.01,同时该值也作为式(13)中梯度下降参数的初始值β0,图2给出了各个时刻自适应梯度下降法中梯度下降参数的数值。
从图1中角速度观测数据可以看出,MEMS模块在运行中的姿态变化较为平稳,没有急剧的旋转。由图2可知,在自适应梯度下降法中,梯度下降参数是动态变化的,其数值主要取决于角速度的大小。
图3显示了两种梯度下降法的姿态解算误差。为方便比较,图4显示了航向角误差的局部结果,表1进一步统计了姿态解算误差的均方根误差(RMSE)和计算耗时。
从图3中各个姿态角解算误差可以看出,传统的梯度下降法和自适应梯度下降法解算的结果较为接近,尤其是横滚角和俯仰角的结果基本一致,但是航向角的结果则有显著的区别。进一步结合图4可以看出,在40~80s之间,自适应梯度下降法解算的航向角误差绝对值明显小于传统的梯度下降法,在其他时间段内则基本一致,这说明自适应梯度下降法是有效的。
由表1统计结果可知,自适应梯度下降法解算横滚角和俯仰角的精度相对于传统方法略有改善;航向角的解算精度则有11.2%的改善。两种梯度下降法解算横滚角和俯仰角的精度与EKF方法在同一水平,但航向角的精度均低于EKF方法。从计算耗时来看,两种梯度下降法的计算效率明显高于EKF方法,其耗时仅为EKF方法的一半左右。
4 结论
在地下管线的惯性定位中,由于不同传感器各自具有相应的优势和不足,因而有必要对MEMS传感器的数据进行融合。本文提出一种改进的自适应调节参数的梯度下降法,融合低成本MEMS传感器的加速度、陀螺仪和磁力计数据。通过实测数据验证了该方法的有效性和可行性。结果表明:自适应梯度下降法解算横滚角和俯仰角的精度相对于传统方法略有改善,航向角解算精度有11.2%的改善。两种梯度下降法解算横滚角和俯仰角的精度与EKF方法在同一水平,航向角的精度均低于EKF方法,但是计算效率有较大的提升。这表明改进方法具有一定的工程应用价值,适用于地下管线惯性定位中低成本MEMS传感器的姿态解算。
參考文献
[1]葛文,徐长虹,李学涛.惯性定位技术在非开挖深埋管线探测中的应用研究及精度分析[J].城市勘测,2020(6):151-155.
[2]任广振,罗进圣,胡伟.惯性陀螺仪定位三维测量技术在非开挖电力管线探测中的应用[J].浙江电力,2014(7):32-36.
[3]王东.地下管线惯性定位仪在非开挖地下管线竣工测量中的应用[J].北京测绘,2020(3):319-323.
[4]杜金桥.惯性定位仪和导向仪在深层非金属管线探测中的应用分析[J].城市勘测,2021(2):170-176.
[5]程铭宇,陈友良.三维惯性陀螺定位技术在非开挖地下管线高精度探测中的应用研究[J].城市勘测,2021(1):182-184,189.
[6]甄兆聪.REDUCT惯性定位系统在地下管线测量中的应用[J].勘察科学技术,2018(2):47-50,64.
[7]牛小骥,旷俭,陈起金.采用MEMS惯导的小口径管道内检测定位方案可行性研究[J].传感技术学报,2016(1):40-44.
[8]高怡,李东航,郭飘.基于梯度下降算法的飞行器姿态解算[J].电子设计工程,2021(23):7-10.
[9]李文鹏,唐海洋.基于STM32的四旋翼飞行器姿态解算的研究[J].单片机与嵌入式系统应用,2016(6):13-16.
[10]刘青文,郭剑东,浦黄忠,等.基于梯度下降法的四旋翼无人机姿态估计系统[J].电光与控制,2018(5):17-21.
[11]陈亮,杨柳庆,肖前贵.基于梯度下降法和互补滤波的航向姿态参考系统[J].电子设计工程,2016(24):38-41,45.
[12]陈卓,任久春,朱谦.基于梯度下降的自适应姿态融合算法[J].传感器与微系统,2019(3):124-126.
[13]章政,王龙,曾聪.运动加速度抑制的动态步长梯度下降姿态解算算法[J].信息与控制,2017(2):136-143.
[14]李洪兵,何丽,袁亮,等.基于改进梯度下降法的移动机器人姿态解算[J].机床与液压,2020(21):1-5.
[15]王铎,袁亮,侯爱萍,等.改进梯度下降法的机载云台姿态解算[J].组合机床与自动化加工技术,2019(8):29-31,58.
[16]董长军.四旋翼飞行器姿态解算方法研究与飞控系统实现[D].苏州:苏州大学,2021.
(编辑 李春燕)
Application of improved gradient descent method in inertial positioning attitude estimation
of underground pipeline
Zhang Nan, Cui Houkun, Xu Weizhou
(State Grid Jiangsu Electric Power Design Consulting Co., Ltd., Nanjing 210008, China)
Abstract: Aiming at the disadvantages of low efficiency and uncertainty of determining the optimal parameters in attitude estimation when traditional algorithms are used for inertial positioning of underground pipeline, a gradient descent method with adaptive parameter adjustment is proposed. This method fuses the data of accelerometer, gyroscope and magnetometer, and automatically adjusts the gradient descent parameters to update the quaternion attitude information. The test results show that the accuracy of roll angle and pitch angle estimated by this method is consistent with the traditional gradient descent method, the accuracy of yaw angle is improved by 11.2%, and the calculation efficiency is improved by 50% compared with the extended Kalman filter method.
Key words: attitude estimation; quaternion; gradient descent method; underground pipeline; inertial positioning technology
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
电子制作(2017年24期)2017-02-02 07:14:16
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
河北科技大学学报(2015年5期)2015-03-11 16:16:37
法大研究生(2015年2期)2015-02-27 10:13:55
