基于STM32 的喊话救援小车设计
2023-08-16 05:01:16富浩然吴文伍
无线互联科技 2023年11期
富浩然,吴文伍
(浙江农业商贸职业学院 汽车技术系,浙江 绍兴 312088)
0 引言
随着用电器使用数量的增加和燃气管道数量增多,火灾发生的概率增大,与此同时,高层建筑中装修使用有机易燃易爆物比例不降反升。 而火灾一旦发生,必须投入消防力量进行救援,以减小着火建筑处的人员伤亡和财产损失。 本文研究了一种消防智能小车来替代部分消防人工作;当消防人员无法进入火情现场时,也可实现火情现场与外界的沟通[1]。
本文拟基于ARM 设计一款具有喊话救援功能的救援智能小车。 同时,对车身结构、电源系统、麦克纳姆轮、电机系统控制进行设计选型,主要为在车身上设置有监控系统、控制系统和通信系统。 监控系统和通信系统均与控制系统相连。 监控系统用于采集火灾现场的火情和判断火灾建筑所在位置,以便更准确地控制行进方向;通信系统用于外部人员与火场内部人员的通讯[2]。 该智能小车可在未了解火场内部情况时,先进入火场内进行探测,为后续消防人员提供火场情报,减少火场中突发情况对消防员的损害。
1 智能小车的发展与救援小车的研究现状
1.1 智能小车的发展
智能小车研究始于20 世纪60 年代末,曾名为行走机器人研究。 最初只是单纯的机械控制,近10 余年随着控制芯片的发展,逐渐“智能”化,虽然时间不长,但智能小车的应用非常广泛。 (1)军事领域:给智能小车上设置高清摄像机、GPS、夜视仪等装置,让智能小车完成情报收集,敌情监测、侦察、自主巡逻等功能;除此之外,小车还可以完成扫雷,投放弹药等工作。 (2)航天领域:代替人类去探索未知的星球。2021 年5 月,我国“祝融”号天问一号任务火星车登陆火星,完成了地面巡视、地质探测任务,这使我国成为世界上第二个独立掌握火星着陆巡视探测技术的国家。 (3)工程领域:煤气管道、工业管道、输油输汽管道裂纹或泄露破损点的排查等一系列具一定危险性的工作,智能小车都可以完成。 (4)救援工作:自然灾害发生后的废墟巡生救援工作和火灾消防救援工作,智能小车都可以协助完成[3-5]。
1.2 喊话救援智能小车的研究现状
如图1 所示为一款消防侦察机器人,主要实现在火情早期探测高温物体,进行物理识别,获取图像温度及位置信息并实时反馈至消防救援中心,由消防工作人员判断后下达消防指令,每日定时定点巡逻。

图1 消防侦察机器人
除上述消防小车侦查机器人外,当前消防排烟机器人与消防灭火机器人也逐渐得到应用,如图2—3所示。 其主要实现灭火、排烟、降毒等功能,每台重量达千斤,需用卡车运送,由消防员操作无线遥控控制方向,开启排烟或喷水系统。 受体型空间限制,该机器人通常在火灾建筑物周边移动,生产厂家主要为中信重工[6]。

图2 消防排烟机器人

图3 消防灭火机器人
目前,智能小车研究和应用较为广泛,根据文献和网络资源的检索,消防智能小车研究主要集中在:(1)消防小车的路线寻迹避障;(2)火情现场的灭火机制机构。 二者的研究重点均为如何消灭火情,对于长时间的灭火,忽略了灭火所需的原料与电源,如泡沫、水罐和干粉等耗材会限制智能消防小车的使用。除此之外,对智能小车而言,喊话救援功能比灭火救援更具有实用价值[7-9]。
在无法得知火场内部情况时,外部指挥人员控制小车进入火场内,并播放逃生指引,被困人员可以按照指引方法逃生。 通过监控系统对火场内部的环境和火情进行摄像,并将视频由通信系统传送至外部的指挥员处,方便外部指挥员了解火场内情况。
社会经济日益发展,某些建筑在拥有巨大社会效益和经济利益的同时,也伴随着巨大的风险导致危险物品和易燃易爆物质发生燃烧、爆炸等。 一旦发生灾害,消防员必须冒着生命危险完成任务。 近5 年中,年均20 万起火灾数量、有30 位消防人员牺牲,因火情受伤更不在少数。 如何降低火灾发生率和提升消防队员安全系数的问题急需解决,若是有了先进的“小车”辅助消防员,在提升效率的同时也能提升营救的安全系数。
2 喊话救援小车的设计
2.1 本项目的设计思路和方法
基于本项目主要功用是替代和辅助消防员作业,在受困人情绪紧张不知所措的前提下指引逃生。 本设计采用STM32F105 单片机实现,控制电机驱动系统,调节4 个麦轮的转向与转速,调整喊话救援内容。电源采用24 V 动力锂电池供电,摄像模块完成图像采集,存储到存储器并发射至控制操作员端,操作员控制转向模块调整摄像区域,声放模块播放逃生指引,拾音模块收集火情现场声音信息,操作员根据声音信息进行直接喊话救援。
具体设计思路如图4 所示,共包含4 部分内容:(1)车身结构设计。 设计整体车架结构,选择保险杠形式与安装方法,前后独立悬挂的实现与固定,根据电子硬件和电源系统尺寸,对外壳尺寸及安装孔位进行设计。 (2)系统总体方案设计。 完成单片机型号的选定,直流电机驱动芯片的选型,摄像、存储、声放、拾音的匹配设计。 (3)硬件电路设计。 单片机主控单元的设计,摄像驱动单元设计,声放与拾音驱动单元设计。 (4)系统软件设计。 主程序设计,电机检测驱动模块程序设计,通信模块程序设计,软件抗干扰程序设计,安卓操作端的设计等。
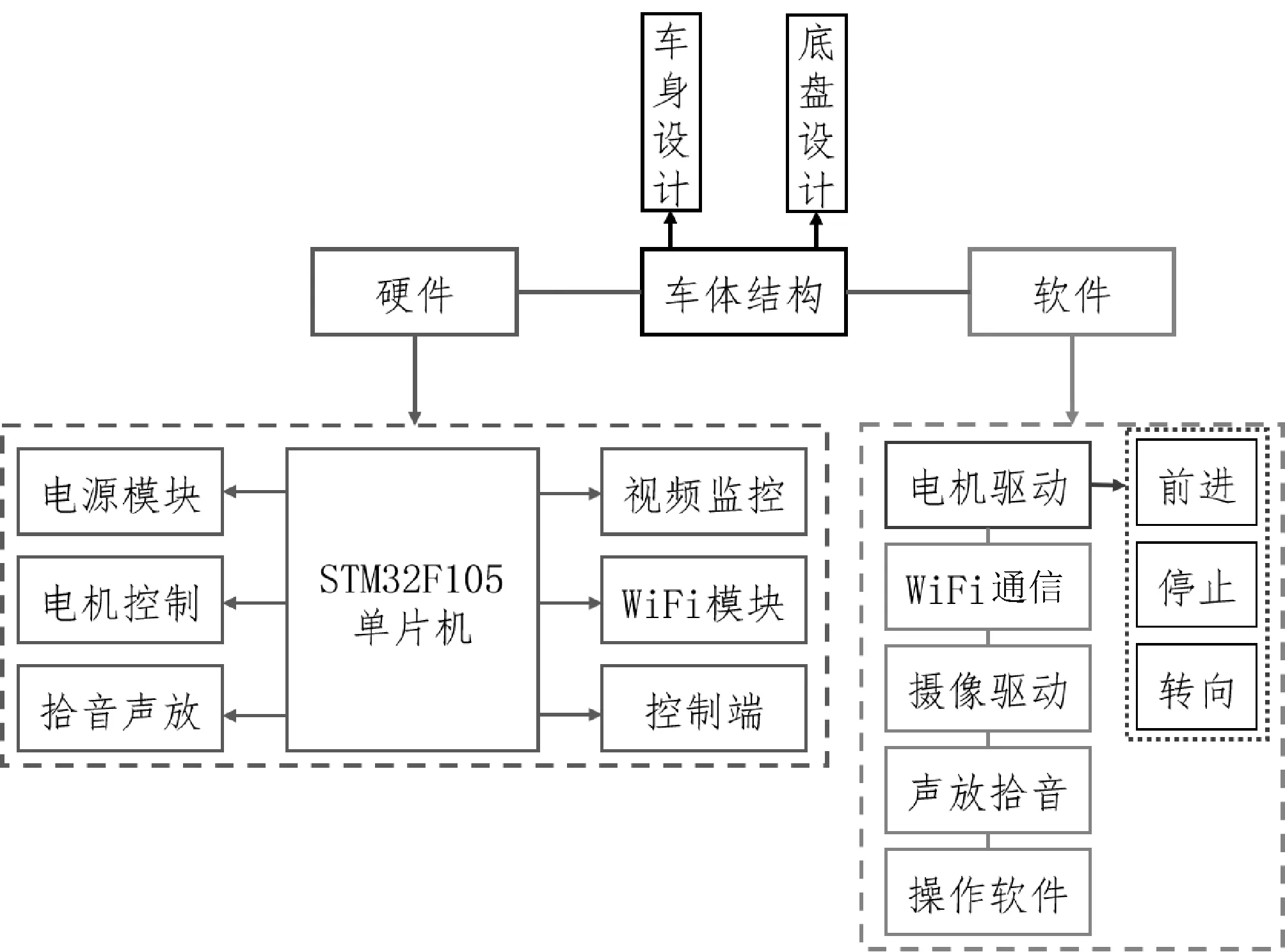
图4 设计思路
2.2 车身结构设计
车身主要包括车架、保险杆、麦克纳姆轮、电机、前后独立悬挂、外壳。 本项目采用薄壁粗铝方管制作成车架,能安装螺母的内嵌件进行与方管形成车架主体,在车架前后端均安装落地防卡导轮,避免飞坡姿态或速度过快造成不稳定落地倒,保险杠与车架采用钢板进行连接,当车身在承受大载荷冲击时共同吸收能量,以保护车架破坏。 麦克纳姆轮对称进行分布,鲁棒性好,减小内部摩擦损耗,采用连轴方式与电机连接,拆装简易,连接强度高,可实现全向移动。 文章所述的电机为M3508P19 直流无刷减速电机,具有体积小功率大的优点,前后独立悬挂采用纵臂形式,可简化省去连杆非独立。 车壳上采用1 mm Q345B 钢板钣金制作,以安装电源系统、监控系统、控制系统等。 其外形如图5 所示。
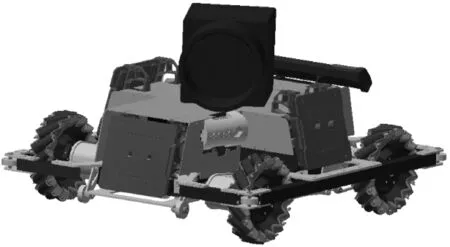
图5 整体设计外形
2.3 控制系统设计
控制系统主要完成外部传感器采集信息的处理,如温度传感器、烟雾传感器、氧气浓度传感器等,以实现对各个部件运行状态的监测和数据采集。
采集火灾现场的火情和判断所在建筑位置后,以便更准确地控制行进方向,操作员根据监控系统的图像信息通过控制转向模块调整摄像区域,而不影响车体行进,声音播放模块循环播放逃生指引,拾音模块收集火情现场声音信息存储到存储器或将其通过通信系统发射至控制操作员端,操作员根据声音信息调整控制内容,进行直接喊话救援。
对于设置目标坐标方位的控制指令,可由手机端绘制PC 端同时发送控制指令至接收器,可实现喊话救援内容转播与音量大小调节,控制收发信息内容与优先顺序。 通信系统采用WiFi 进行传输,主要收发车身与外部指挥员二者之间的图像与声音信息。
部分核心方位坐标的控制代码如下:
Get coordinate (IDC_E_X, str1);
Get coordinate (IDC_E_Y, str1);
numberx= _txoset(str1);
numbery= _tyoset(str1);
coordinate 8_t gz1_data[] = { 0x00, 0x02, 0x01,0x06, numberx / 512, numbery / 512 };
next (control time);
3 结语
本文提出的基于STM32 的喊话救援小车,首先对整体车架结构进行了设计,其次对控制系统总体方案进行了研究,最后完成了硬件电路和系统软件的调试。 主要创新点如下:(1)系统软件先进程度高。 基于STM32F105 单片机实现了多种接口和协议的集成,电机驱动程序、通信模块程序、抗干扰程序、摄像驱动程序、声放与拾音驱动程序,可控制电机驱动系统,控制收发信息内容与优先顺序。 (2)动力性能与通过性能好。 电源系统采用24 V 动力锂电池(99.9 Wh)进行供电,整体车架采用7075 高强铝合金,整备质量轻,最高时速为45.2 m/min,可实现全向任意移动,最大爬坡度达到51°,关键电子元件部位采用气凝胶包裹隔热。 (3)使用稳定性高与可靠性强。小车设有前后独立悬挂和飞轮导向,提高产品结构使用寿命。 设置麦克纳姆轮和直流无刷减速电机,鲁棒性好,减小内部摩擦损耗,大幅提升小车使用性能,操作员根据声音信息调整控制内容,进行直接喊话救援,完成控制即时性。
由于实验条件限制,暂时未对其他性能进行测试,如高温环境下的使用性能缺少具体数据,搭载的部分传感器分辨率欠佳,下一步拟应用到真实场景下改进设计。
猜你喜欢
消防界(电子版)(2022年10期)2022-12-15 12:11:49
物流技术与应用(2022年5期)2022-06-17 06:02:34
装备制造技术(2021年4期)2021-08-05 07:39:40
控制与信息技术(2021年2期)2021-07-23 01:10:26
中国石油石化(2021年9期)2021-03-30 12:32:15
人民调解(2019年3期)2019-03-16 00:22:44
电子制作(2018年18期)2018-11-14 01:48:00
中国自行车(2018年4期)2018-05-26 09:01:43
儿童故事画报·发现号趣味百科(2015年6期)2015-08-17 17:36:54
汽车零部件(2014年5期)2014-11-11 12:24:34