
基于图像和人工鱼群算法的建筑火灾动态疏散路径规划研究
2023-08-11 13:52:59贾科进李佳玥杜云李飞飞张效玮
河北工业科技 2023年1期
贾科进 李佳玥 杜云 李飞飞 张效玮

关键词:人工智能理论;路径规划;人工鱼群算法;建筑火灾;栅格法;人脸识别
中图分类号:TP391.9 文献标识码:A DOI: 10.7535/hbgykj.2023yx01005
近年来,大型建筑物的设计愈加复杂,建筑火灾等安全隐患一直存在。一旦出现火情,建筑自身结构和材料的复杂性,烟气流动和风力作用,使得火势蔓延迅速、火灾扑救困难、人员撤离缓慢,而传统的静态疏散系统因为无法根据着火点信息和人员拥挤程度对路径进行及时调整,容易造成堵塞,无法引导人群快速逃生,延误最佳逃生时间。因此,动态疏散系统的研究对保障人员安全、快速有效疏散具有重要意义。
近些年来,学者们对如何利用人群疏散系统更合理、更智能地进行路径规划[1]开展了大量的研究。PELECHANO等[2]基于拥挤仿真模型,把应急疏散过程中人员受安全教育程度和个体相互协助对疏散效率的影响考虑进去,得到最优路径。ALIZADEH[3]提出一种动态的元胞自动机模型[4]来模拟在有障碍的空间下进行的疏散,分别考虑疏散人员的心理、出口位置、宽度和障碍物的位置等基本参数,认为疏散人员的初始分布在獲得的结果中起重要作用。学者们还将遗传算法、Dijkstra算法[5]和蚁群算法[6]等智能优化算法引入建筑火灾疏散的路径规划研究中,不断对疏散模型进行改进优化。如张慧彬等[7]基于遗传算法的优化方法,采用自然数编码进行路径规划,确定轮盘赌算子、单点交叉算子和互换变异算子,然后通过数值实验模拟疏散,分析计算出最优路径。曹祥红等[8]提出了基于Dijkstra-ACO混合算法的应急疏散路径动态规划,先在算法迭代进程中利用经典Dijkstra算法依次通过路径相关节点,来生成初始次优路径,然后在初始路径的基础上,应用蚁群算法求解出全局最优路径的方案,实现动态疏散。
但是这些疏散系统依旧存在着不足,无法兼顾人群行为、火灾信息和拥堵情况来实现动态疏散。而人工鱼群算法的鱼类群体协作过程与疏散中的人群行为表现类似,能够形象化地描述人员疏散的不同行为[9]。因此,本文结合图像识别,将人工鱼群算法应用于建筑火灾疏散的路径优化问题中。
完整的火灾应急疏散系统包括火灾智能检测装置(摄像头、传感器等)、服务器、中央电源控制器、智能控制器分机、疏散示意图和动态消防指示灯、应急照明灯等几部分[10-11]。本文研究的建筑火灾动态疏散路径规划问题,是服务器基于着火点和人群拥堵程度进行动态疏散人群的软硬件结合的应用。本文只涉及算法部分,通过构建栅格地图,用鱼群觅食来模拟建筑火灾下的人员疏散过程,再通过引入鱼群的可行解代替最优解,避免鱼群陷入局部最优和全局最优相互干扰的情况,然后结合摄像头判断当前路径是否拥挤,从而实现火灾疏散路径的动态优化,然后通过控制疏散指示灯,引导人群实现动态疏散。能够同时顾及个体本能反应和群体影响,解决了静态疏散系统规划路径固定、不能随火灾发生情况和人群拥挤程度及时更新的问题。
1 相关研究基础
1.1 环境建模
当火灾发生时,算法的任务是通过已知内部建筑结构的前提下,进行全局路径规划,为了测试算法的可行性,以一单层建筑为例,对建模环境有如下描述。
1)已知该楼层所有建筑信息和火灾情况。
2)已知建筑内人员的数量和所有安全通道出口的位置[12],假设逃生人员聚集在同一区域中,并且初始位置已知。
3)逃生过程中需要考虑逃生路线长度、环境温度、有毒气体浓度、以及逃生路线的拥挤度。
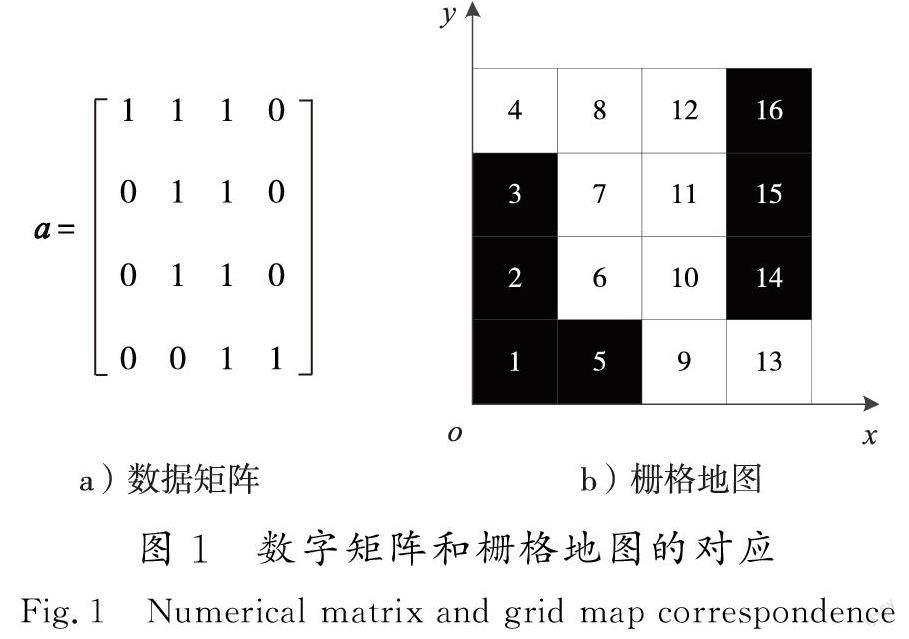
为了方便分析和研究,将所有环境信息进行栅格化处理,建立相应的数字矩阵,而后根据矩阵来生成对应栅格地图[13]。在矩阵中,分别用0和1来表示栅格环境下的障碍物区域和可行区域。如图1所示,栅格地图可通过矩阵行列的坐标转换来实现一一对应。
式中:Nx和Ny分别表示矩阵a 的行数和列数;mod函数为求余函数,其格式为mod(number,divisor),number为被除数,divisor为除数,求解结果为两数值作除法运算后的余数,且结果符号与除数符号相同;fix函数是一种取整函数、截断函数,其格式为fix(number),取整规则是向最靠近零取整,即删除number参数的小数部分并返回以整数表示的结果。
在栅格环境下建立规模为20×20的仿真模型,同时根据已知的相关建筑信息和火灾情况进行障碍物的设置,模拟真实环境。在20×20的栅格环境中,栅格序号是由从下至上、从左至右的数字进行填充,即填充1~400。
模拟建筑正常和火灾时环境的栅格地图如图2所示,其中黑色区域表示障碍物,不可通行;白色区域表示可行区域,而疏散路径的规划只能在可行区域内进行;黄色区域表示着火点的位置(11,8),当栅格地图上出现黄色区域时,表示当前有火灾发生,需要绕行。
通过引入可行解解决了局部最优解和全局最优解相互干扰的问题,可行解是记录个体鱼的位置信息,传统人工鱼群算法是在鱼群中所有个体鱼本次迭代中的最优位置,即局部最优解,进而当局部最优解相连接时,可能会出现全局解越障的行为。
1.3 图像检测人数信息
拥堵,是指一种人多拥挤且移动速度缓慢的现象。通常情况下,同一范围内的人数越多,人与人之间的距离会越小,人员的移动速度就会越慢。比如,在一个摄像头的监控范围内,该空间最多容纳15个人才能保持一定的移动速度,那么当识别到人数超过15人时,则认为该监控范围内的路径出现拥堵。
路径是否出现拥堵情况是影响人员疏散的重要因素之一。由于最后通向安全出口位置的路径一般比较简单,大多是直通通道,且安全通道满足消防规范要求的净宽度即可,通常不会设置太宽,因此人数过多时容易造成拥堵。而交叉口和转角等位置也容易聚集人员,具有很大的拥堵可能性。应急疏散指示灯可根据图4进行设置,来分散一些人员压力。3种疏散指示如图5所示。
此外,还需要通过安置在各个安全出口、交叉口等位置的监控摄像头来采集人数信息,并判断拥堵情况、选择合适疏散路径。
根据建筑室内信息,在出入口位置和十字路口位置安装可旋转式监控摄像头,可以选取TP-LINK的TL-IPC44K-4;其余过道、小房间门口等位置安装固定式监控摄像头,可以选取海康威视3326FWDA3/C-IS。
监控点位置布局如图6 所示,紫色圆点表示360°可旋转监控摄像头位置,大概需要12个,红色圆点表示固定式监控摄像头位置,大概需要24个。监控摄像头的具体安装高度和角度需根据实际情况进行调整。
选择疏散路径的流程图如图7所示,首先用摄像头采集图像信息,然后通过OpenCV 进行人脸识别来检测人数信息,再根据实际安全通道出口的容量设置一个合适的临界值。当识别到的人数大于等于临界值时视为当前安全通道呈拥堵状态,需要调整次优疏散路径为临时的最优路径,从而减轻拥堵安全通道的逃生负担,保障疏散快速进行;当识别到的人数小于临界值时视为安全通道呈畅通状态,可保持当前的最优疏散路径继续正常通行。图像检测人数信息结果如图8所示。
2 疏散模型的构建及算法实现
2.1 人工鱼群算法疏散模型构建基础
为了验证基于人工鱼群算法进行建筑火灾人员疏散方案的有效性,以一大型商场为仿真实验的工程背景,目前只考虑该建筑一层的人员疏散路径规划。构建20×20的栅格地图,标记当前所在位置为起始位置START,4个安全通道出口上、下、左、右各一个,记为目标点并在图中用GOAL标出。
人群朝各个出口疏散过程可类似看作鱼群的觅食过程,疏散个体可看作人工鱼个体,将疏散人群的数目、位置、步长和感知范围等参数数据根据鱼群算法一一设定。
2.2 算法的实现过程
算法的具体实现步骤如下。
Step1:初始化相关参数。参数包括数量N 、步长step、感知范围visual、拥挤度因子δ 和最大迭代次数等。
Step2:初始化目标点。
Step3:条件判断。判断是否执行觅食行为,是则更新公告板信息,否则执行下一步。
Step4:条件判断。判断是否执行聚群或追尾行为,是则更新公告板信息,否則执行随机行为后更新公告板信息。
Step5:条件判断。判断是否找到目标位置,是则计算最短路径并跳到Step6。
Step6:条件判断。判断是否达到迭代次数,是则继续执行下一步,否则返回到Step3。
Step7:条件判断。判断是否计划了所有目标点,是则继续下一步,否则返回Step2。
Step8:找到最短且不拥堵的路径,结束。
算法流程图如图9所示。
3 仿真模拟及结果分析
在上述建立的20×20的栅格环境中验证基于人工鱼群算法的疏散效果。
在模拟建筑环境和模拟建筑火灾环境两种栅格地图下,设置起始点位置START,即人员当前位置为(11,10),用红色实心点表示。目标点位置GOAL有4个,从最下面的安全通道出口开始,按顺时针顺序分别设置在(9,1)、(1,10)、(10,20)、(20,10),其目标点位置对应是161,10,200,390,可分别记为出口1、出口2、出口3以及出口4,用绿色实心点表示。人工鱼群算法规划路径的结果用红色圆圈实线表示。
3.1 正常情况下到各出口的疏散路径规划
从起始点位置分别到4个目标点位置的最短距离如表1所示。
在当前位置下,如图10的a)—d)所示,分别是到4个安全通道出口的最短路径规划结果。
3.2 火灾发生时到各出口的疏散路径规划
在火灾发生的情况下,将着火点位置添加到栅格地图中,栅格图的障碍区域和可通行区域发生改变,从起始点位置分别到4个目标点位置的最短路径长度会根据火灾点位置的变化而发生变化。当前最短距离如表2所示。
如图11所示,着火点的位置坐标为(11,8),到4个安全通道出口的最短路径规划结果如图11的a)—d)所示。
人工鱼群算法在不同情况下的路径规划图如图12所示。疏散示意图可根据图12 b)中的最优路径显示,调节动态消防指示灯,按规划出的路线指引逃生。若摄像头通过采集图像识别到通往最优路径的安全出口逃生的人数过多时,则判断该条路径为拥堵,拥堵的安全通道出口用品红色标记。为避免拥堵,保证所规划的路径可以快速地疏散人群,可先调节应急指示灯指向次优路径的安全出口逃生,如图12 c)所示,通过分散人群来缩短疏散时间。若经过一定的缓冲时间,安全通道出口的负担减轻后,可继续按图12 b)调节动态消防指示灯,优先指向最佳可行路径。
3.3 多起点到各出口的疏散路径规划
在模拟火灾环境的栅格地图中,添加一个新的起始位置,坐标为(15,14),并用蓝色实心点表示,旁边标有蓝色的START 字样。其他信息不变,还是按照之前的起始位置、火灾点位置和4个出口位置来设置。如图13所示,是人工鱼群算法在多起点情况下的路径规划图。其中,红色圆圈并用实线连接的路径是起点(11,10)的规划图,蓝色圆圈并用实线连接的路径是起点(15,14)的规划图。
根据规划结果可以发现,在2个起点位置规划出的路径会在出口1方向上进行重叠,这极易造成出口1出现拥堵情况,拥堵后的路径规划如图14所示。
根据路径规划图及时调整疏散指示灯的方向,待拥堵状态缓解后,重新规划的路径如图15所示。
3.4 不同算法下疏散效果对比分析
遗传算法是通过模仿自然界的选择与遗传的机理来寻找最优解的进化算法,是具有随机性的全局优化算法。遗传算法有3个基本算子:选择、交叉和变异。
蚁群算法是一种用来寻找优化路径的概率型算法。其灵感来源于蚂蚁觅食过程中发现路径的行为:不同的环境下,蚂蚁寻找到最短到达食物源的路径后,通过蚁群内蚂蚁间的信息传递,在经过一段时间后,使得整个蚁群都沿着最短路径到达食物源。
分别用遗传算法和蚁群算法在着火时的栅格环境下进行路径规划,遗传算法的路径规划图如图16所示,规划结果用绿色星星实线表示;蚁群算法的路径规划图如图17所示,规划结果用蓝色星星实线表示。然后与上文中人工鱼群算法规划出来的结果图12 b)相比较,对比3种算法的疏散效果。
经多次仿真可发现,蚁群算法容易陷入局部最优,出现如图18所示的死锁状态。为了便于对比分析,分别记录3种算法的20次有效数据,包括同一起点到各个出口的路径长度、总路径长度和运行时间等。
经计算,20次仿真的平均数值结果如表3所示。根据表3中的数据可知,人工鱼群算法的平均运行时间比遗传算法慢了1.06 s,但总路径长度减少了约2.86 m,与蚁群算法相比,平均运行时间提快了2.76 s,规划出的平均总路径长度约减少了12.22 m,整体疏散效率有所提高。人工鱼群算法规划的路径存在少量冗余路段,各出口承担的逃生压力比较均衡,规划出的路径同最短路径差异不大,规划结果相对稳定;遗传算法规划的路径中冗余路段较多,各出口规划效果相对稳定但复杂地图上的随机性较大;蚁群算法规划的路径,出口1和出口3能直接规划最短路径,但遇到这种地图上稍复杂些时,出口2和出口4便会规划出大量冗余路段,各出口路径相差过大,规划结果不稳定,使得出口1和出口3的逃生负担加重,不利于快速疏散。由此可知,人工鱼群算法的稳定性相对更好一些。
再根据记录的这3种算法运行后得到的时间和路径长度等仿真数据来绘制对比图。其中,人工鱼群算法的数据结果用红色圆圈标出,遗传算法的数据结果用绿色星星标出,蚁群算法的数据结果用蓝色星星标出,并分别用与数据点相同颜色的直线进行连接,得到折线对比图。如图19所示,是3种算法运行时间对比图,其中横坐标的数值表示第几次仿真测试,取值范围为1~20的整数,纵坐标表示每次运行后所对应的时间。如图20所示,是3种算法规划的路径长度对比图,其中横坐标的数值依旧表示第几次仿真测试,取值范围还是1~20的整数,而纵坐标则表示每次运行后所对应的规划出的路径长度。
根据上述时间和路径长度的对比图可知,遗传算法整体用时比人工鱼群算法少1.06 s,但规划的路径效果相对较差一些,路径长度的整体变化浮动都高于人工鱼群算法。而人工鱼群算法整体看来比蚁群算法用时要少,平均运行时间快了2.76 s。在相近的时间内,人工鱼群算法规划的路径长度明显更短,主要集中在46~50,且变化幅度相对平缓;蚁群算法规划的路径长度相对更长,且变化幅度较大,主要集中在60左右。由此可见,人工鱼群算法与遗传算法、蚁群算法相比,运行时间相近,规划路径更短,稳定性更好,疏散效率更高。
4 结语
本文将人工鱼群算法应用于建筑火灾人员疏散的方案中,利用人工鱼群算法来模拟人群疏散过程,寻找最优路径,同时可结合人脸识别来及时更新各个路段上的人数信息,避免大量人员拥堵,造成个别安全通道逃生负担加重,在时间和空间的双重约束下实现动态疏散人群。
仿真实验表明,该算法可行,通过将鱼群的最优解替换为可行解,使鱼群避免陷入局部最优或死锁状态。与遗传算法和蚁群算法相比,该算法计算结果质量更好且更加稳定,在相同运行时间内规划出的路径長度更短,使得人群可以通过更少时间、更短路径、更高效率进行动态疏散。本文仅通过仿真实验对着火拥堵等情况下的人员疏散路径进行了规划,未来还需在实际环境中进一步验证和改进。
猜你喜欢
作文中学版(2022年1期)2022-04-14 08:00:34
学生天地(2020年31期)2020-06-01 02:32:06
电子制作(2017年17期)2017-12-18 06:40:55
电子制作(2017年1期)2017-05-17 03:54:46
中国新通信(2016年22期)2017-01-13 09:15:21
电脑知识与技术(2016年28期)2016-12-21 13:11:43
电子技术与软件工程(2016年20期)2016-12-21 10:52:33
科技视界(2016年26期)2016-12-17 15:53:57
电脑知识与技术(2016年26期)2016-11-25 00:00:00
科技视界(2016年20期)2016-09-29 12:00:43
