一种基于机载点云的DEM生成方法研究
2023-08-08 15:42:38赵哲东刘东柱赵岩尹兆阳颜新蕾杨家铭姜海峰
山东国土资源 2023年7期
赵哲东 刘东柱 赵岩 尹兆阳 颜新蕾 杨家铭 姜海峰
摘要:DEM即数字高程模型,是通过有限的地形高程数据实现对地面地形的数字化模拟。DEM具有许多生产方式,作为直接获取对象表面点三维坐标的现代对地观测技术,机载激光扫描在DEM构建方面具有很大优势。因此,本文研究了一种基于机载激光点云数据的DEM生成方法,该方法的关键在于机载点云的地面滤波处理。本文提出了一种改进的渐进三角网滤波方法,通过计算各点坡度以及邻域范围内的高差最大值,进行直方图统计分析,实现高度及角度阈值的自适应估计。将本文结果与人工滤波及布料滤波方法进行对比分析。实验结果表明,本文方法的结果更加贴近人工滤波处理效果,可有效提高DEM生成的精度。
关键词:机载点云;地面滤波;DEM;反距离加权
中图分类号:P208
文献标识码:A doi:10.12128/j.issn.1672-6979.2023.07.004
引文格式:赵哲东,刘东柱,赵岩,等.一种基于机载点云的DEM生成方法研究[J].山东国土资源,2023,39(7):21-26.ZHAO Zhedong, LIU Dongzhu, ZHAO Yan, et al. Study on a DEM Generation Method Based on Airborne Point Cloud[J].Shandong Land and Resources,2023,39(7):21-26.
0 引言
三维激光扫描技术又称实景复制技术,自20世纪80年代引入测绘领域,在数据获取速度、质量和操作性展现出巨大的优势,该技术凭借其非接触性测量方式、采样率高、高精度、高分辨率、速度快等优点,被誉为测绘领域继GPS技术之后的又一项技术革命。自20世纪90年代起,该技术快速发展起来,并在测绘行业应用广泛。三维激光扫描仪可以自动、连续、快速地获取地表信息并以点云的方式呈现出来,得到扫描目标的三维坐标[1]。点云是通过三维激光扫描仪所采集的包含物体各种表面信息,如位置信息(XYZ)、激光的反射强度、颜色信息(RGB)等信息的海量离散点集合。点云数据所包含的丰富信息有助于进行地表特征的解读,虽然点云数据的离散性使其不能连续表达地表信息,但是可以通过使用地面点数据建立DEM的方式反映地表信息[2]。
原始的机载点云同时包含了地面信息与地物信息,考虑到地物点与地面点的混杂对DEM精度的影响,在对原始的机载点云进行地面滤波处理后,方可用于DEM的生成。
在原始的机载点云数据中,位于真实地形表面的点云数据被称为地面点,而位于自然植被、树木或人工建筑物表面的点云数据被称为地物点[3]。需要通过点云滤波处理分离出地面点,以尽量避免各种地物比如建筑物、植被、人工设施等对DEM精度的影响,以便于地表信息的准确获取,将地物点与地面点分离的过程即为地面滤波[4]。常见的地面滤波算法包括渐进三角网滤波算法[5]、布料模拟滤波算法[6]、基于数学形态学的点云滤波算法[7]、基于坡度的点云滤波算法[8]、基于曲面拟合的滤波算法[9]等。其中渐进三角网滤波算法,能够适应不同地形,并能根据测区内的建筑物尺寸设置参数,经过合理的参数设置,能够有效滤除不同尺寸的建筑物、低矮植被和其他地物[10]。许多学者对渐进三角网算法进行了改进,以提升该算法在不同地形条件下的滤波效果,凌晓春[11]提出了采用局部坡度拟合法和引入薄板样条曲线插值法进行改进,张启光[12]提出了一种融合形态学与渐进三角网的滤波算法,王欢等[13]提出了一种针对山区点云的渐进加密三角网滤波改进算法,通过优化种子点,大大提高了渐进三角网算法在山区的处理能力。
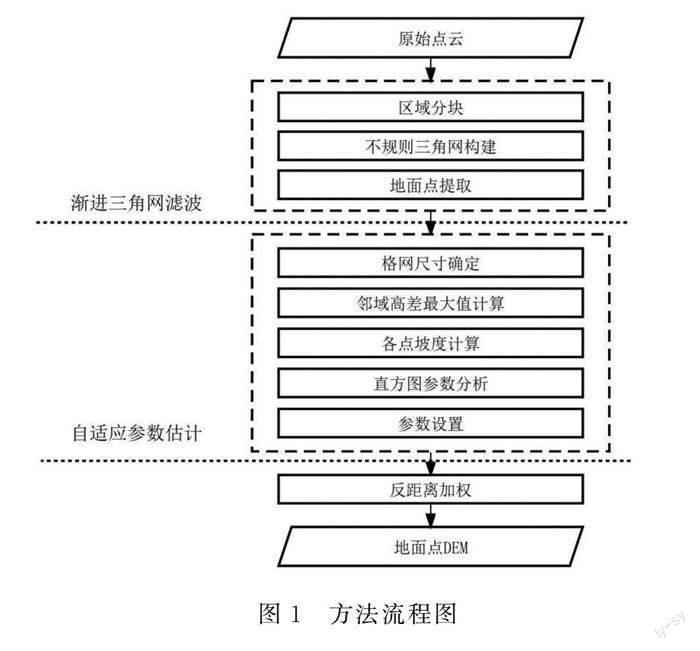
本文研究了一种基于机载激光点云数据的DEM生成方法,该方法主要包括基于改进的渐进三角网算法进行地面滤波以及反距离加权DEM生成两个方面(图1)。
1 渐进三角网地面滤波改进
1.1 渐进三角网地面滤波原理
渐进三角网滤波算法的原理是根据地面点划分格网,选取高程最低点作为种子点,依据种子点构建初始三角网,设置一定的阈值对剩余点云进行迭代加密,从而获取地面点[14]。渐进三角网算法的基本步骤如下:
(1)建立格网索引,选取种子点。
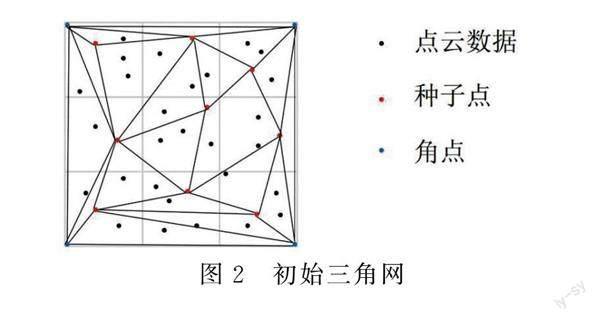
(2)根据Delaunay三角网构建方法[15],建立初始三角网(图2)。
(3)遍歷点云,判断点所在三角面,根据渐进三角网提取地面点的基本原理[10],计算反复角和反复距离,若反复角与反复距离均小于阈值,则判断该点为地面点,将该点加入三角网。通过反复迭代,直到没有点加入三角网为止[16]。
1.2 参数阈值自适应估计改进
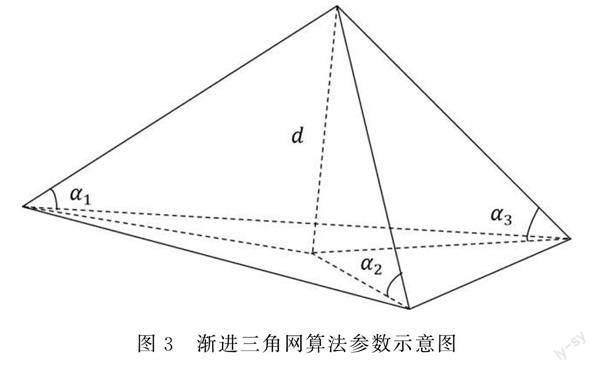
在进行地面点提取时,需要进行参数阈值设置。因此需要对机载点云数据进行参数阈值自适应估计,以提高渐进三角网滤波的效果(图3)。
图中d为反复距离,α1,α2.α3为反复角。渐进三角网算法就是以反复角和反复距离为滤波参数,通过不断向上加密三角网来提取新的地面点。预先设置高度阈值和角度阈值,若d小于高度阈值,且α1,α2.α3中的最大值小于角度阈值,则判定该点为地面点。
初始格网的大小一般略大于最大建筑物尺寸,便于迭代加密过程中滤除尺寸较大的地物[16]。随后,根据点云中各点的坡度和邻域高差的最大值,绘制直方图进行参数阈值估计。
在进行地面滤波时,考虑到具有较大参数的点云为地物点的概率较大,将高度阈值和角度阈值设置为直方图中占点云总数前80%处所对应的高差和坡度值。经过实验验证,该数值具有可行性。
2 反距离加权DEM生成
反距离加权法是检索以插值点为中心的一定范围内所有的点,这些点的高程均会对插值点的高程造成影响,其权重与各点到插值点的距离相关,距离越近权重越大,距离越远权重越小,通过计算加权平均值求得插值点高程[17],公式如下:
ZP=∑ni=1PiZi∑ni=1Pi(1)
Pi=1di(2)
式中:ZP—插值点的高程, Pi—插值点的权重, Zi—距离范围内的点高程,di—影响范围内各点到插值点的距离。
3 实验与分析
3.1 实验数据
本文选择了某复杂地形的机载点云和一段道路机载点云作为实验数据,均以高程进行渲染。本文中所指的复杂地形即地面高低起伏较大,存在陡坡、缓坡、平地等地形类型,且同时包含植被和建筑物的地形情况,能够以此验证在参数阈值自适应估计下渐进三角网滤波的准确性。点云数据如图4所示。
3.2 实验设计
使用C#语言进行渐进三角网滤波算法的编程实现。在进行地面滤波前进行了点云抽稀处理,主要目的是在保证精度的同时尽可能地减少数据量,提高数据处理的效率[18]。应用1m间隔的格网进行点云抽稀,抽稀后点云如图5所示。
计算得到的两组数据的坡度与高差分布直方图如图6、图7所示。结合上述理论,根据分布直方图进行阈值参数自适应估计,将占点云总数前80%处所对应的高差和坡度值设置为高度阈值与角度阈值。
渐进三角网滤波效果如图8所示。从图8可以看出,本文算法对不同地形情况的点云都具有良好的滤波效果,能够有效滤除不同尺寸的建筑物、植被及其他地物,并能很好地保持地形特征。
本文将人工滤波的结果作为标准,以地面点准确率P进行精度评估。
P=NaNb×100%(3)
式中:P—准确率;Na—通过算法提取的地面点数;Nb—手动提取的地面点数。为验证该阈值参数选择下的渐进三角网滤波的合理性。将抽稀后点云分别进行手动提取与布料滤波。两组数据的地面点准确率对比如表1所示。
实验结果表明,渐进三角网滤波与手动提取地面点的效果更为一致,相比于布料滤波,具有更好的效果。
本文研究中提升地面滤波质量的关键在于对测区进行参数阈值自适应估计。根据建筑物对角线的最大尺寸设置格网大小。对于角度阈值和高度阈值的设置,本文采取了将点云的坡度与邻域高差最大值作为阈值参数依据的方法,根据分布直方图进行阈值参数选择,将高度阈值和角度阈值设置为直方图中占点云总数前80%处所对应的高差和坡度值。实验证明,使用该方法进行参数选择存在合理性,将人工滤波作为标准,两组数据进行滤波的准确率均高于95%。
4 结论
(1)本文围绕机载点云数据DEM生成开展研究,主要研究了一种基于自适应参数阈值改进的渐进三角网算法进行地面滤波,并运用反距离加权方法生成了DEM。在点云滤波部分中,通过采集测区内高差、坡度、建筑物对角线距离等数据来推算阈值参数进行滤波,最后计算地面点准确率,通过与人工滤波及布料滤波的效果进行对比,发现在该地区进行自适应的阈值参数估计后,改进后的渐进三角网滤波的效果与手动提取结果较一致,达到95%以上,可以用于高精度DEM的生成。
(2)本文算法对高度阈值与角度阈值的选择存在一定的主观性,必定带来一定的误差。对于高度阈值与角度阈值的自动确定还需要进一步研究。
(3)本文采用的基于反距离加权生成DEM的方法精度较低,建议采用精度更高的DEM生成方法进行研究。
参考文献:
[1] 李瑾杨,范建荣,徐京华.基于点云数据内插DEM的精度比較研究[J].测绘与空间地理信息,2013,36(1):37-40.
[2] 崔浩,高飞,余敏,等.结合CSF和TIN的机载LiDAR点云滤波算法[J].合肥工业大学学报(自然科学版),2022,45(5):644-648.
[3] 邹正,邹进贵,胡海洋.不同机载LiDAR点云滤波算法对比分析[J].测绘地理信息,2021,46(5):52-56.
[4] 石壮,杜全叶,王庆栋,等.虚拟格网分类支持下的密集匹配点云布料模拟滤波[J].测绘通报,2022(2):73-77.
[5] Peter Axelsson.DEM generation from laser scannerdata using adaptive TIN models[J]. InternationalArchives of Photogrammetry and Remote Sensing ,2000,33(B4):110-117.
[6] Wuming ZHANG, Jianbo QI, Peng WAN, et al . An easy-to-use airborne LiDAR data filtering method based on cloth simulation[J]. Remote Sensing, 2016, 8(6): 501.
[7] 卢秀山,刘如飞,田茂义,等.利用改进的数学形态法进行车载激光点云地面滤波[J].武汉大学学报·信息科学版,2014,39(5):514-519.
[8] Vosselman G.Slope based filtering of laser altimetry data[J]. international archives of photogrammetry & remote sensing, 2000.
[9] Dunn JC . A Fuzzy Relative of the ISODATA Process and Its Use in Detecting Compact Well-Separated Clusters[J]. Cybernetics and Systems.
[10] 隋立春,张熠斌,张硕,等.基于渐进三角网的机载LiDAR点云数据滤波[J].武汉大学学报·信息科学版,2011,36(10):1159-1163.
[11] 凌晓春.对渐进三角网点云数据滤波算法的改进[J].测绘通报,2020(10):43-47.
[12] 张启光.一种融合形态学与渐进三角网的滤波算法[J].测绘标准化,2022,38(2):46-51.
[13] 王欢,张翰超,张艳,等.针对山区点云的渐进加密三角网滤波改进算法[J].地理空间信息,2020,18(12):27-30.
[14] 焦元冰,陆爱萍.基于机载LiDAR点云数据的改进滤波算法[J].测绘标准化,2022,38(3):42-46.
[15] 余杰,吕品,郑昌文.Delaunay三角网构建方法比较研究[J].中国图像图形学报,2010,15(8):1158-1167.
[16] 邵为真,赵富燕,梁周雁.基于不规则三角网的渐进加密滤波算法研究[J].北京测绘,2016(6):17-21.
[17] 刘洋,习晓环,王成,等.一种改进的渐进加密三角网点云滤波算法[J].测绘科学,2020,45(5):106-111.
[18] 张锦明,郭丽萍,张小丹.反距离加权插值算法中插值参数对DEM插值误差的影响[J].测绘科学技术学报,2012,29(1):51-56.
Study on a DEM Generation Method Based on Airborne Point Cloud
ZHAO Zhedong1,LIU Dongzhu1,ZHAO Yan2,YIN Zhaoyang1,YAN Xinlei1,YANG Jiaming1, JIANG Haifeng2
(1.Geomatics College of Shandong University of Science and Technology,Shandong Qingdao 266590, China; 2.Shandong Institute of Land Surveying and Mapping, Shandong Ji'nan 250013,China)
Abstract: In this paper, a method based on 3D laser point cloud data has been introduced, which eliminates the influence of ground object points on data interpolation through progressive triangulation filtering, and interpolates the filtered point cloud to obtain DEM based on the inverse distance weighting principle. The key of this method is the filtering effect of the progressive triangulation algorithm. In this paper, a histogram is generated based on the normal vector of each point and the maximum height difference of each point within the neighborhood. The method of preserving most point clouds is adopted for parameter selection and filtering. This result has been compared and analyzed with manual filtering and fabric filtering. The experimental results show that the asymptotic triangular network filtering effect after parameter estimation is closer to the effect of manual filtering. By comparing the DEM generated by artificial filtering and progressive triangulation filtering, the RMSE value is calculated, and the results show a small difference, and the rationality of this method has been proved.
Key words: Airborne point cloud; ground filtering; DEM; inverse distance weighting algorithm
收稿日期:2023-03-27;
修訂日期:2023-04-12;
编辑:陶卫卫
基金项目:大学生创新创业训练计划项目(202210424006);“菁英计划”科研支持经费(0104060541613)
作者简介:赵哲东(2001—),男,山东淄博人,山东科技大学测绘与空间信息学院本科生;E-mail:2172645188@qq.com *
通讯作者:赵岩(1981—),男,高级工程师,主要从事基础测绘、地理国情监测等工作;E-mail:2172645188@qq.com
猜你喜欢
西南石油大学学报(自然科学版)(2019年1期)2019-01-28 09:33:52
智能计算机与应用(2017年2期)2017-05-04 00:45:34
电测与仪表(2016年10期)2016-04-12 00:26:24
电测与仪表(2016年14期)2016-04-11 12:32:48
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
长江工程职业技术学院学报(2014年4期)2014-11-30 02:41:40
电测与仪表(2014年11期)2014-04-04 09:21:30
电子设计工程(2014年20期)2014-02-27 12:01:00
测绘科学与工程(2013年4期)2013-03-11 15:07:41