
异步响应数据对结构模态识别影响的研究
2023-08-05 06:16金大帅合肥市轨道交通集团有限公司安徽合肥230000
安徽建筑 2023年7期
金大帅 (合肥市轨道交通集团有限公司,安徽 合肥 230000)
0 引言
结构健康监测可以有效的对结构的健康状态进行实时监测,出现损伤时能及时预警,将事故伤害降到最低。模态参数是工程结构固有的振动特性,每一阶模态都具有特定的固有频率、阻尼比和模态振型。模态参数识别是结构动力设计及状态评估过程中不可或缺的一环[1-3]。作为一种环境激励下的模态参数识别方法,随机子空间法因具有直接作用于时域数据(data driven)而不必将时域数据转换为相关函数或谱、识别精度高等特点,因此被广泛应用[4-6]。随机子空间法进行结构参数识别时直接作用于实测响应数据,而在模态识别过程中,实测数据的时间不同步可能直接导致识别结果出现偏差。时间不同步直接影响数据之间的相位信息,而相位信息是结构性能和损伤评估的重要指标。为了探究结构异步实测数据对结构模态识别的影响,文章利用ANSYS 有限元仿真软件建立了四层框架结构模型,提取结构不同位置处的异步响应信号,利用随机子空间法识别结构模态参数。
1 随机子空间基本理论
1.1 状态空间方程
式中:xk=x(kΔt)为n维离散的状态向量,n为自由度;yk为N维输出向量,N为响应点数;A 为n×n阶系统矩阵,表示系统的动力特性;B 为离散输入矩阵;C 为N×n阶输出矩阵,描述结构内部状态如何转化为外界的测量值;wk为建模误差或处理过程引起的噪声;vk为传感器误差引起的噪声。
式(1)整理得到随机子空间识别的基本方程:
1.2 模态参数分析
矩阵A的特征值分解如下:
式中:Λ = dia g(λi),λi为离散时间系统的特征值;ϕ为系统的特征向量矩阵。
由矩阵Λ 得到离散的特征值λi,可用式(4)求得系统特征值ui:
第i阶模态的振型表示为φi= Cϕi。
1.3 随机子空间算法
为计算系统矩阵A 和输出矩阵C,笔者将结构所有测点的响应数据组成2li×j的Hankel矩阵:
式中:hi为第i时刻所有测点的响应数据;Hpast为li×j阶“过去”输出矩阵;Hfuture为li×j阶“将来”输出矩阵。
对Hankel矩阵QR进行分解[9-11],可将数据从2li×j缩减至li×j,极大地减少数据量,加快程序的运行。QR分解可表示为:
将Hankel 矩阵中的“将来”输出矩阵向“过去”输出矩阵的行空间进行正交投影,得到投影矩阵Oi。投影矩阵可表示为:
对投影矩阵SVD进行分解:
另外,还有个重要定理:
式中:Γi为可观测矩阵;为卡尔曼滤波状态向量矩阵。
则由式(7)、式(8)可得:
采用最小二乘法可得:
其中:·†表示矩阵·的广义逆矩阵。
SVD 分解后,矩阵S1的秩可以确定系统的阶次。至此,即可识别出系统矩阵和输出矩阵。
2 结构仿真模型与模态识别
用ANSYS 软件进行建模,在框架结构右侧设置4 个间距相同的信号采集点,对框架左侧施加激励。框架结构具体参数为宽度a=6 m、四层框结构每层高h=2.9 m、柱子采用beam188 单元、横梁采用shell63 单元。材料属性参数为,柱子为矩形截面、弹性模量E=25 GPa、泊松比为0.2。横梁为矩形截面,弹性模量E=30 GPa。在框架右侧等距离设置四个信号采集点,如图1所示。
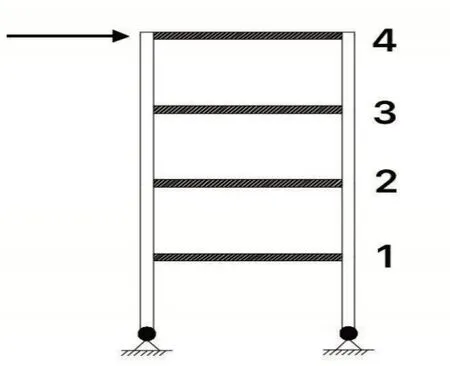
图1 框架结构测点布置图
采用ANSYS 软件建模完成后,对框架进行模态分析,计算得到前三阶自振频率和振型如图2所示。

图2 框架前三阶模态振型图
框架模态分析结束后,对框架结构施加零均值的噪声作为结构的激励。利用ANSYS 有限元分析软件中的瞬态分析,提取各测点加速度响应数据,最后设置相应工况对结构响应信号进行异步采样。对框架结构指定位置施加噪声激励后,结构不同测点的响应数据采集进行如下处理。首先1 号测点开始采样,同时其他测点未开始采集数据;2 号测点在1 号测点采样1 s 后开始采样;3 号测点在1 号测点采样2 s 后开始采样;4 号测点在1 号测点采样3 s 后开始采样,采样频率均为400 Hz,加速度响应采集结束后,利用随机子空间方法对异步采样数据进行模态参数识别。
首先设置稳定图满足的计算参数,取值分别为自振频率的稳定标准取值0.5%,阻尼比的稳定标准取值2%,模态振型的稳定标准取值0.5%。利用稳定图程序对采集的异步响应数据进行计算,得到的稳定图如图3所示。

图3 框架结构稳定图
通过选取图3 中前三阶稳定轴的稳定点可以确定结构的模型阶次,确定模型阶次后识别得到结构频率和结构振型。简支梁的异步响应数据模态频率计算结果如表1所示。
为了更好反映计算振型与识别振型的相关性,引入振型相似因子的概念,定义振型相似因子DMAC如下[12]:
DMAC=1-MAC
一般情况下DMAC 值偏向0 时,认为两个振型是同一振型;反之,偏向1 时认为是不同振型。根据研究所得,当DMAC<0.05 时,可认为两振型为同一振型[13-14]。
在得到前三阶频率识别结果后,将识别的前三阶结构振型和ANSYS有限元计算振型进行归一化对比,得到振型图和相应的振型相似因子如图4所示。

图4 框架模拟异步振型识别
通过识别结果可知,一阶频率识别差值为0.008 Hz、二阶频率识别差值为0.125 Hz、三阶频率识别差值为0.706 Hz,前三阶自振频率的振型相似因子均满足DMAC>0.05。通过识别结果可知,随机子空间法对异步实测数据的振型识别效果较差,前三阶振型相似因子DMAC均不满足同一振型的判定条件。
3 结论
使用随机子空间法识别桥梁模态参数时,通常直接对测点的实测响应数据进行处理。理想情况下信号采样点之间进行同步采样,利用模态识别方法,可以通过同步采样信号,较好的识别出结构的模态参数。当结构测点的采样时间不同步时,会对结构的模态参数(特别是模态振型)产生显著的影响。在异步采样的影响下,由于模态振型的识别结果不能满足与理论振型是同一个振型的定义,因此在实际工程应用中,应当细致考虑结构的异步响应数据对结构模态振型识别的影响。
猜你喜欢
力学与实践(2022年5期)2022-10-21
结构工程师(2022年2期)2022-07-15
数学物理学报(2022年2期)2022-04-26
兰州交通大学学报(2022年2期)2022-04-26
建材发展导向(2021年14期)2021-08-23
特种结构(2019年2期)2019-08-19
工程建设与设计(2016年2期)2016-08-22
山西大同大学学报(自然科学版)(2016年6期)2016-01-30
山西建筑(2015年14期)2015-06-05
国外科技新书评介(2014年12期)2015-01-05
