
北京三号A/B卫星热设计及验证
2023-07-27 02:18刘伟黄兴李挺豪范庆梅高宇纯江海
航天器工程 2023年3期
刘伟 黄兴 李挺豪 范庆梅 高宇纯 江海
(北京空间飞行器总体设计部,北京 100094)
北京三号A/B卫星是基于三超(超敏捷、超稳定、超精度)平台的光学遥感卫星,三超平台是我国新一代卫星平台,可实现复杂敏捷动中成像,且具备沿任意地面轨迹目标成像能力[1]。北京三号A/B卫星携带分辨率0.5m的高精度相机,具备凝视成像、任意轨迹成像、立体成像等多种对地观测能力。
本文针对北京三号A/B卫星对地大范围频繁姿态机动,国内软件无法直接计算姿态机动过程实时瞬态外热流的难题,提出轨道空间和地表多个指向位置之间机动及其过程的外热流仿真分析方法;针对北京三号A/B卫星成像期间内外热流剧烈变化且不确定,以及主动指向超静平台高精高稳定温度控制需求,提出离散式散热面优化设计方法、抑制高外热流的多级隔热技术,主动指向超静平台超精超稳热控制及卫星结构力热解耦的热设计方法,对热性能的飞行试验进行了总结和评价。
1 北京三号A/B卫星轨道外热流分析方法
1.1 北京三号A/B卫星构型及飞行姿态
北京三号A/B卫星为六棱柱构型,采用3个固定太阳翼,如图1所示。
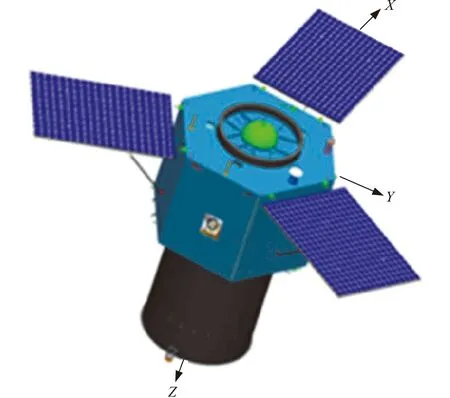
图1 北京三号B卫星示意图
卫星运行在太阳同步轨道,典型飞行姿态如图2所示。无成像任务圈次,飞行模式为阴影区三轴稳定对地定向,光照区对日巡航。有成像任务圈次,日下点附近(AB段)转为三轴稳定对地定向,并可进行45°锥角范围内频繁快速机动。成像圈次,每个轨道周期进行4次对日对地姿态转换,且成像期间最多进行70次姿态机动。
1.2 卫星轨道外热流分析
传统的卫星外热流分析是给出卫星在轨道上的空间外热流,但现有的商业软件只能支持固定坐标系(例如轨道坐标系)下常规姿态分析,无法实现复杂任务模式下随任务要求变化的实时仿真,本文给出三超平台任务模式下的精准外热流分析方法,通过分析获得任务期间的精准姿态函数,并生成可提供给商业软件的接口数据,借助商业软件实现外热流求解。姿态函数获取方式如下。
针对三超平台卫星最小路径机动轨迹控制[2]特点,在航天器机动序列中,采用航天器任意机动模式中绕前一矢量目标与当前目标矢量构成的平面法线机动,保证姿态机动及过程中航天器三轴指向方位确定,从而实现任意动态指向函数机动过程的空间位置计算,具体如下。
航天器上任意单位矢量表达式为
r=a0i+b0j+c0k
(1)

时间、方位角关系如下:
t0时刻,r指向已知矢量为r0(均为轨道坐标系下的矢量,下同);
t1时刻,r指向已知矢量r1;
t2时刻,r指向已知矢量r2;
…
tn时刻,r指向已知矢量rn。
以t1时刻和t2时刻为例,r1与r2的平面法线n为
n=r1·r2/|r1×r2|=a0i+b0j+c0k
(2)
按照自由机动模式,有转动矩阵
(3)
t1时刻和t2时刻之间的机动角速度为
ω12=arccos(r1·r2)/(t2-t1)
(4)
对于t1和t2之间的任意时间点t(t1≤t≤t2)机动角度γ为
(5)
机动调整过程中任意时间点t的姿态矩阵为
(6)
根据式(6),可以得到机动过程姿态动态函数,通过标准数据接口,嵌入THERMAL DESKTOP外热流分析软件轨道姿态角矩阵,构建包含航天器所有动态机动信息的轨道外热流分析模型,实现任意机动过程及机动组合条件下的轨道实时外热流精确分析。
三超平台卫星的六棱柱构型,每个轨道周期对日对地姿态转换,以及成像期间大角度频繁机动,导致外热流变化规律和太阳同步轨道传统立方体构型[3-5]完全不同。
无成像任务圈次,阴影区对地、光照区对日巡航,除-Z面光照区热流为1个太阳常数外,其他表面外热流处于低稳热流状态,变化曲线见图3(a)。

图3 轨道外热流曲线
光照区有成像任务时,姿态调整为三轴稳定对地定向,且随成像目标变化而进行机动调整,卫星各表面外热流随目标指向变化很大,其中-Z面外热流绝对值大,变化相对小,但-Z面包覆多层隔热材料,该处外热流对整星温度影响很小;阴面侧板(±X+Y面)外热流绝对值较小且变化也不大,是较稳定和最有效的散热面;其他各侧面(±X/-Y面、±X面、-X/-Y面、-X面)的外热流随观察目标变化很大,最大到达热流可达1300W/m2且变化剧烈,但一般仅限于其中一个表面的外热流变化大,其他表面变化较小,各表面外热流总和变化较小,考虑到观察目标的随机性,±X面、±X/-Y面也是较好的散热面,热流曲线示意见图3(b)。
以成像区单轨道圈实现3个长江五条带成像+单轨道圈绕Y轴-45°为例,给出三超平台卫星实时机动条件下的外热流曲线,如图4所示。单板外热流变化异常剧烈,瞬时最大波动在50~1300W/m2;平均热流最大波动200W/m2以上;各侧板外热流呈跷跷板式的变化趋势,某些侧板瞬态热流急剧增大,同时其他侧板外热流则显著减小,除-Z面外,整星外热流总量变化不大。图5为360°范围内最大角度45°机动各舱板外热流分布图,可以看出,各舱板热流变化剧烈,但是整星外热流总和变化不大。

图4 两个轨道周期长江5条带拼接+绕Y轴45°机动外热流曲线
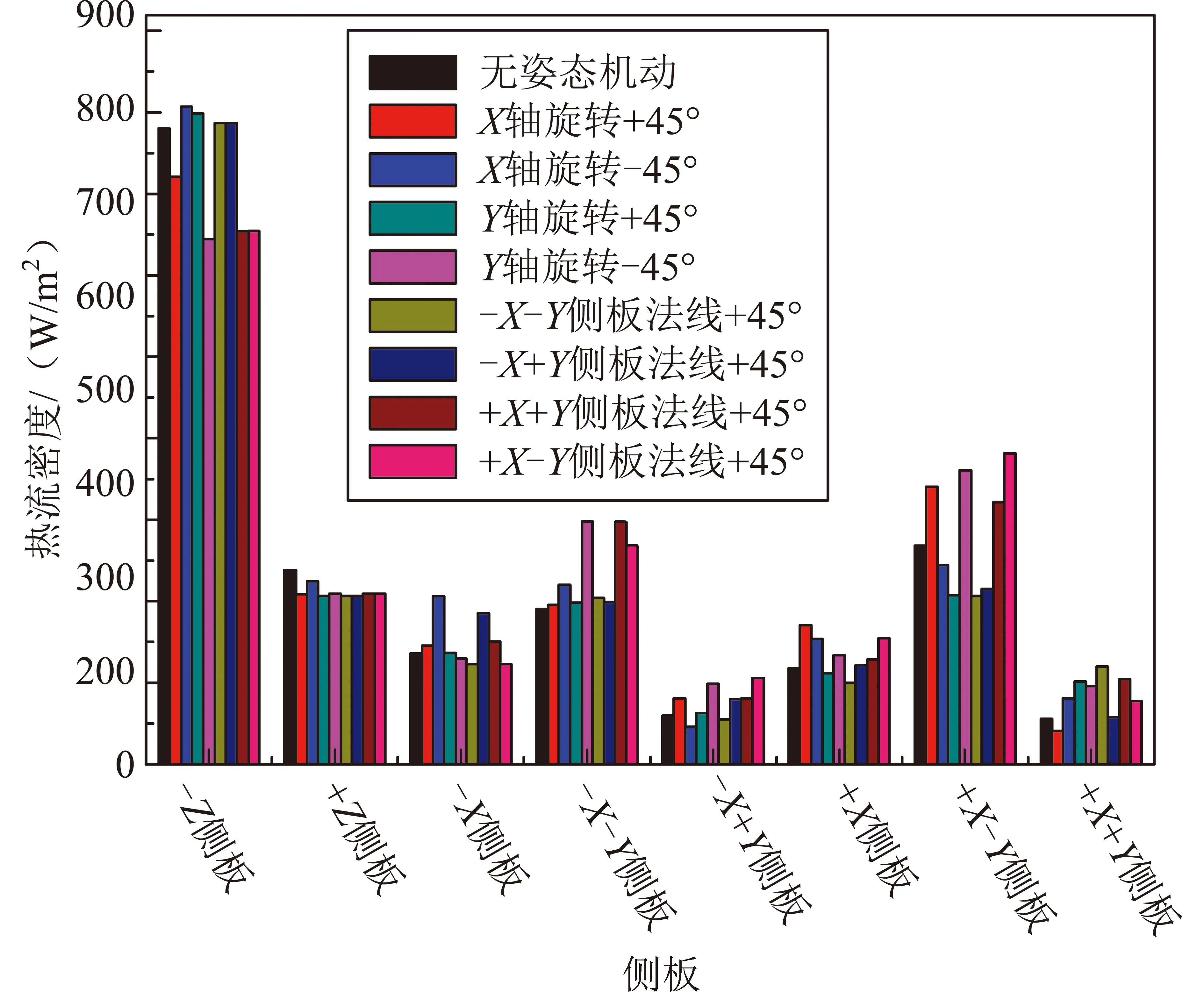
图5 最大角度姿态侧板轨道平均外热流
大角度姿态机动导致卫星各面外热流波动剧烈且变化不确定性大,加之载荷工作内热源大幅增加,内外热流叠加引起的大范围温度波动和三超平台的超精度、超稳定温度控制要求的矛盾是热控面临的挑战。
2 北京三号A/B卫星热设计方法
针对三超平台外热流变化剧烈且不确定,主动指向超静平台高精高稳的温度控制要求,以及主动指向超静平台和卫星结构力热解耦的特殊需求,热设计思路是在平均外热流较小的舱板上离散优化布置散热面,降低姿态机动导致外热流变化的不确定性;在外热流大且变化剧烈的区域,采用多级隔热技术抑制热流波动减小对卫星的温度扰动,为高精高稳的主动指向超静平台提供良好的温度边界;主动指向超静采用自带散热面热管+比例/开关的高精度闭环控温的自适应热设计,既满足了高精高稳的温度控制需求,又实现了和卫星结构力热解耦,保证平台运动不受干涉,避免热控措施对超静平台运动时产生的额外应力。
2.1 散热面的离散优化设计
针对频繁姿态切换且大角度姿态机动带来的局部热流波动过大以及受影响的表面随机动目标变化不确定的难题,北京三号A/B卫星打破传统太阳同步轨道卫星主、辅散热面[6]的设计思路,通过在各侧板布置适当面积散热面的离散设计方法,降低随机动目标不同导致受影响散热面外热流变化不确定的风险,同时兼顾卫星设备布局,再通过分析手段优化面积比,保证整星热量迅速有效排散。散热面结构布局见图6。在方案论证阶段,进行了传统的散热面热管等温化设计和散热面离散优化设计比对,散热面等温化设计主要针对侧板上布置大量有源设备有较好的效果,而三超平台卫星的大部分设备安装在隔板上,设备先辐射到舱板上,再通过二次辐射排散到冷空间。因此,在没有设备的舱板上采取预埋热管等温化设计效率很低,需要的热管数量大大增加,会增加很多质量。基于上述情况,最终选择散热面离散优化设计,即保证整星的散热,也节省了质量。

图6 散热面示意图
2.2 高热流抑制的多级隔热设计
对于对日巡航表面,由于其长期受太阳直照,外热流很大,且光照阴影波动很大,故采用多级隔热强化设计方法抑制外热流的波动,保证舱内设备高稳定的温度环境和舱外管路温度满足指标要求。
平台底板内外表面均包覆多层的双多层方法;肼瓶支架则采用多层+隔热屏组件的非接触式强化辐射隔热方法,抑制外热流波动从而减小承力筒舱内相机光机主体温度波动。隔热屏为半刚性结构,由多层隔热组件+不锈钢丝网组件,隔热屏结构示意如图7所示。热分析和在轨飞行数据均显示,平台底板内表面多层和肼瓶支架内表面温度波动在6℃左右,远小于单层多层的温度波动。

图7 隔热屏示意图
舱外管路朝天,对日巡航条件下光照区直照,阴影区没有任何外热流。需要针对舱外管路进行精细化建模,分析多层不同单元数,不同加热功率、不同面膜对管路温度的影响;多层温度及包覆的松紧程度对隔热性能影响很大,故热设计时需要在更广参数范围内满足设计指标要求,设计中考虑星外管路多层当量辐射换热系数0.03~0.15,并且从材料的力学属性上选择小膨胀系数的聚酰亚胺面膜以保证高低温条件下的力学属性。
经过多方案分析比较,同时借鉴已发射型号的在轨飞行经验,舱外管路采用2个10单元多层隔热组件包覆,外层面膜选择低温区热膨胀系数变化小的单面镀铝聚酰亚胺,保证多层阴影区良好的隔热性能。加热功率大于典型低轨有地球红外热流的舱外管路,应对阴影区完全没有外热流的恶劣环境;此外,选择聚酰亚胺面膜的一大优势是利用其吸收率大的特点,通过在光照区提高管路的温度水平,从而保证阴影区管路温度在跌幅相当的情况下温度能较好地满足指标要求,节省整星在阴影区的加热功率。选择双区间的控温方式,当控温点跌到控温门限以下时,另外一个加热回路自动开启,在控温策略上保证热控制有足够的冗余;测温点布置在管路温度最低的区域,防止阴影区管路冻结风险。
2.3 主动指向超静平台高精高稳力热解耦设计
主动指向超静平台由指向隔振机构、相机光机主体、星敏感器、测微敏感器组成。为保证其超精度、超稳定功能,需要保证主动指向超静平台(20±1)℃温度指标,并且进行力热解耦设计,以减少热变形的影响。下文对主动指向超静平台重要部件指向隔振机构、星敏感器的热控设计进行介绍。
2.3.1 指向隔振机构的热设计
指向隔振机构顶部支架和相机光机主体连接,因此有高温度稳定的要求;电机和传感器线路有一定的热耗,因此有散热需求,且指向隔振机构结构复杂,与安装板导热很差,需要进行针对性热设计。顶部通过被动热隔离+比例控温实现高温度稳定性,底部的电机、传感器线路通过强化导热和辐射排散热量,保证其温度满足要求。
顶支架高精度温控设计:①相机主框架由于安装精度的要求,必须和顶支架导热连接,故作动杆选择低导热系数的钛合金材料,尽量减少作动器线路和电机对顶支架的温度影响,保证其温度稳定性;②布置比例+开关的高精度闭环控温回路,选择比相机略低的控温门限,保证顶支架始终处于主动可控状态,避免额外增加相机主框架散热需求;③外表面包覆多层隔热组件,抑制整星温度波动的影响。
底板散热通道的设计:①电机通过导热铜条将热量传导至铝合金导热面,再通过底板排散到承力筒支撑框上;②传感器线路导热安装在底板,通过降低周围环境温度控制其温度水平,使其与顶支架的温差较小,以减少热变形影响,最终将传感器线路和作动器温度维持在10~20℃左右。
2.3.2 星敏感器热设计
星敏感器热设计宗旨:以自适应热设计为主,不依赖整星环境和星敏感器指向约束,满足观察目标变化导致星敏感器指向不确定的温度控制要求,可实现星敏感器(阳光不进星敏感器主光轴)所有空间指向的温度控制。星敏感器的温度控制点选择(20±0.3)℃,匹配主动指向超静平台的温度水平,以满足超精度、超稳定的要求。
星敏感器热端通过自带集热热管、转接块、转接热管以及体装草帽式热辐射器的方式,将热量接力传递到散热面;光学镜筒和法兰等影响定位精度的关键部位布置比例+开关的高精度闭环控温回路,保证其低温工况下的温度稳定,减小由于温度变化造成热变形继而引起测量和指向的超高精度。为隔离星敏感器和卫星星体之间的辐射换热,以及抑制外热流变化造成的温度波动,除进光口和散热面外其余表面均包覆多层隔热组件。为保证主动指向超静平台运动不受干涉,星敏感器和卫星表面多层采取搭接不固定的设计方式,避免多层固定连接造成对超静平台运动时产生的额外应力。星敏感器热控设计示意见图8。

图8 VIPPS和卫星结构多层搭接解耦设计示意图
3 在轨验证
三超平台卫星首发星北京三号A卫星于2021年6月11日在太原卫星发射中心成功发射,从发射入轨到2022年底,卫星工作正常,热控分系统为整星提供了良好的温度环境。星内长期工作的设备温度在+4~+36℃,短期工作设备温度在-1~+20℃,舱外管路温度在+16.2~+43.5℃之间,指向隔振机构顶支架温度在+19.12~+20.15℃,星敏法兰温度在+19.65~+20.25℃,均满足指标要求,且处于最佳温度范围,飞行温度与热分析预示比较接近(ΔT<5℃),频繁姿态机动的实时外热流的精确分析是精准热分析必不可少的条件。飞行试验和温度预示结果见表1和图9。

表1 北京三号A卫星设备在轨数据
4 结束语
本文针对三超平台对日对地姿态转换及大角度敏捷快速机动,VIPPS和卫星结构工作解耦的特点,采用散热面离散优化,高热流抑制的多级隔热方法、VIPPS和卫星结构热/力全解耦设计等方法,圆满完成了整星热设计任务。创建的多点指向目标(时间函数目标)频繁机动外热流分析算法广泛应用于后续敏捷机动型卫星及轨道姿态变化的外热流分析;高热流抑制的多级隔热方法,主动指向超静平台热/力全解耦设计思路方法为后续敏捷卫星的热设计提供了思路。
猜你喜欢
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
装备制造技术(2020年3期)2020-12-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
制造技术与机床(2017年5期)2018-01-19
制造技术与机床(2017年5期)2018-01-19
传媒评论(2017年8期)2017-11-08
中国塑料(2017年2期)2017-05-17
中国塑料(2014年5期)2014-10-17
