Philips FD20 系列DSA 故障分析与维修
2023-07-27 23:51:24仲建生夏云成
生物医学工程与临床 2023年3期
仲建生,刘 蕾,夏云成
数字减影血管造影 (digital subtraction angiography,DSA)的基本原理是将注入造影剂前后拍摄的两幅X 射线图像经数字化输入图像计算机,通过减影、增强和再成像过程把血管造影影像上的骨与软组织影像消除来获得清晰的纯血管影像,是电子计算机与常规X 射线血管造影相结合的一种检查方法[1]。 DSA主要用于观察血管病变、血管狭窄的定位测量,以及为介入治疗提供真实的立体图像,是各种介入治疗的必备设备,适用于心脑血管、外周血管、肿瘤的检查和介入微创治疗。 DSA 检查的特点是具有对比度分辨率高、检查时间短、造影剂用量少、浓度低、患者X 射线吸收量明显降低等优点,在血管疾病的临床诊断及治疗中具有十分重要的意义。其维修和保养是保证其设备正常运行的基础。 现将2 台DSA 数年来所发生部分故障的分析、维修过程进行总结。
1 故障一
1.1 故障现象
荷兰Philips Allura-Xper FD20 DSA C型臂运动缓慢, 数据监视器 (Data Monitor) 警告(Warning):TUBE BODYGUARD Active(Override)。
1.2 故障分析
根据故障现象及上述提示可知故障部位在机器的防碰撞传感器部分。
1.3 故障维修
该故障在梅雨季节发生率较高,通常数据监视器显示如下:Reduced speed,bodyguard blocks high speed movement;Warning:bodyguard faulty,move at own risk Clean bodyguard;Warning:bodyguard faulty or too close at start-up,risk。 FD20 共有10 个防碰撞传感器,分别位于球管四周、平板的四角及球管前端。 根据提示首先查看球管、探测器周围有无异物,若没有异物可以尝试清洁所有防碰撞传感器,清洁后仍无效,则可以做防碰撞传感器校准[2]。首先开启设备、空调及除湿机1 h 左右,待机房内温度、湿度稳定后再进行校准。 具体步骤如下:①确认机架位于工作区(L 臂在天轨2个黑三角之间的区域),球管、探测器周围80 cm 无任何障碍物; ②点击主机屏幕左上角Option-Start field service-Yes-OK, 进入现场服务模式 (field service framework,FSF) 模式, 选择Adjustment-Geometry-Front stand-sensor-Bodyguard Sensor Adjustment,点击OK,手术间会响一声;③踩住脚闸中间的曝光开关不松开,平板、C型臂等会自动运动,机器开始对防碰撞传感器进行校准,完成后再响1 次;④点Next,再点击2 次OK 后校准结束; ⑤点击System-Accept New Settings 保存后退出。 如未能通过则需要重复校准或者利用诊断工具查找对应的传感器并进行更换。
2 故障二
2.1 故障现象
Philips Allura-Xper FD20 DSA 开机后自检时未听到床和L 臂等机械部分自检的声音。 重启动后主机报错,Geometry restarting:Do Not change SID;Warning:Geometry movements partly available。
2.2 故障分析
根据故障现象及上述提示可知故障部位在机械部分的控制单元。
2.3 故障维修
经询问操作者得知该机上次使用途中因停电机器停机,未再开机。此次开机即报上述错误,怀疑意外断电后位于辅助控制柜(R Cabinet)内控制机械运动的计算机软件崩溃。 查看主机的日志文件,提示控制机械运动的计算机与主控计算机之间无通信[3]。 将控制机械运动的计算机连接显示器并重启, 进入Win7系统,桌面上无机械运动软件启动的2 个命令模式的对话框,确认控制机械运动的计算机软件故障,需要重新安装。 具体步骤如下:①关机并将Philips 提供的格式化硬盘的U 盘插入计算机,再插入USB 键盘;②开机后按DEL 键并输入密码进入BIOS,设置改为U盘启动,保存并退出计算机;③从U 盘启动,选择清除引导设备的选项, 完成后重启计算机; ④拔出U盘,按F12 使用网络启动,从IP 地址为172.22.1.1 的主机找到一个文件file:BOOTWINPE.wim 后自动格式化硬盘并重新安装系统及软件; ⑤约30 min 后重启计算机,可见Win7 桌面显示C:Geo_bootStartGSU.exe 和GSC 2 个命令模式的对话框,点击2 个命令模式的对话框,机器自检时床及L 臂部分听到电磁铁动作的声音,至此机器运行正常。
3 故障三
3.1 故障现象
Philips Allura-Xper FD20 DSA 开机后Warning:Table movements partly available。 床面被锁定,床水平方向和垂直方向均不能动作,重复开关机数次无效。
3.2 故障分析
根据故障现象可知故障部位可能在机械控制信号回路或者驱动部分[4,5]。
3.3 故障维修
根据Philips 随机提供的服务手册中床部分运动原理框图(图1)及日常维修经验,该故障在控制信号传输部分的可能性较大[6]。 具体维修步骤如下:①开机检查床自检时只听到2 声电磁阀(刹车)动作的声音, 查看床下垂直与水平方向的模拟量伺服驱动器(advanced motion control,AMC)状态(Status)指示灯红色,电源(Power)指示灯绿色,状态正常;②将辅助柜中由计算机控制的检查床运动控制 (table motion control)板卡金手指部分清洁后再开机[7],床的自检声音变得正常,但报错未变;按下机架控制模块(geometry control module)上的床面移动解锁按键后刹车不能释放,按床面上升按键后报错警告(Warning):Motorized movement unavailable;③点击主机计算机屏幕左上角option-save log for service 手动导出系统日志文件,用含有预安装环境(preinstallation environment,PE) 工具的U 盘启动主机计算机, 在C:ftprootSaveDevDatalod_YYYYMMDD_TIME 文件夹找到Event.zip 压缩文件,解压缩后在Eventlog.txe 文件内看到机器开机自检时报错床垂直方向的控制器(Smart Drive)故障,自检未能通过;具体报错信息是警告(Warning):AD7 POST:Height drive test failed;错误 (Error):Application error:POST failed:
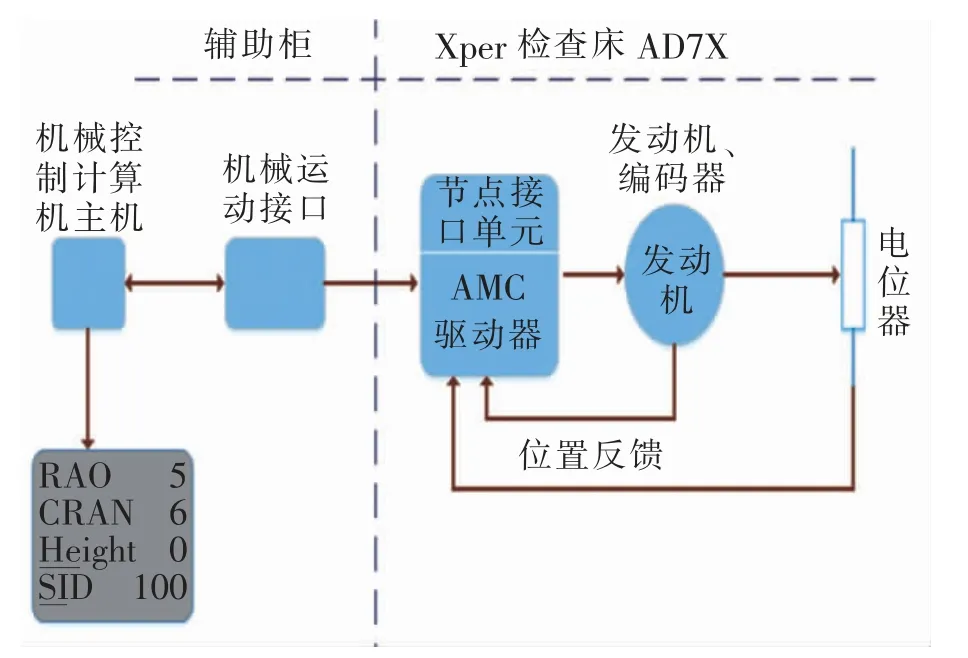
图1 检查床机械运动信号示意图Fig. 1 Schematic diagram of mechanical motion signal of inspection bed

图2 AMC 驱动器烧毁部分电路图Fig.2 Circuit diagram of burned part of AMC driver
4 故障四
4.1 故障现象
Philips UNIQ FD20 DSA C 型臂旋转途中偶发突然停止,刹车动作,显示器无报错信息。
4.2 故障分析
根据故障现象可知是C 型臂旋转控制部分偶发故障导致。
4.3 故障维修
①查看系统日志,故障发生时提示平板防碰撞装置(Force Sensor)动作[8],进FSF 模式。②打开Service—Adjustment-Geometry-Frontal Stand-Sensor-Force Sensor Adjustment 时报错力传感器校准失败(Force Sensor calibration FAILED;Weight=489.6 N,offset=-56.9 N)。③关机拆开L 臂后壳,用转接板接在下面的AMC 控制器上CN3 接插件, 测量该接插件3、4 引脚(Sensor+24 V 供电)阻值278 kΩ,8、11 引脚(sensor 运放输出对地)正常时阻值10.39 kΩ,故障时559 Ω(图3A),判断可能是传感器内运放不稳定导致该故障。④尝试进行ForceSensor 校准失败,进Service--Diagnostics—Geometry—Monitoring—Frontal Stand--Frontal Stand All Movements Monitoring 查看故障时Force Sensor active在Yes 和No 之间跳变(图3B),下面的Force Sensor Voltage 和Force Sensor force 也在变化, 当C 型臂旋转时电压值和压力值也在连续变化,而故障时上述电压值和压力值会跳变。 据此确认为该Force Sensor 故障, 订购相同型号传感器 (ALTHERIS AA6-300N-0.5B),按照服务手册更换并校准后机器正常运行。

图3 力传感器(Force Sensor)电路图(A)和校准状态界面(B)Fig.3 Diagrams of Force Sensor circuit(A)and calibration state(B)
5 讨论
Philips FD20 DSA 主要由高压发生器、X 射线球管、探测器、计算机系统、导管床和专用机架等部件组成,还有配套的高压注射器、各种后处理工作站等(图4)。 结构复杂,维修和保养难度相对较高。
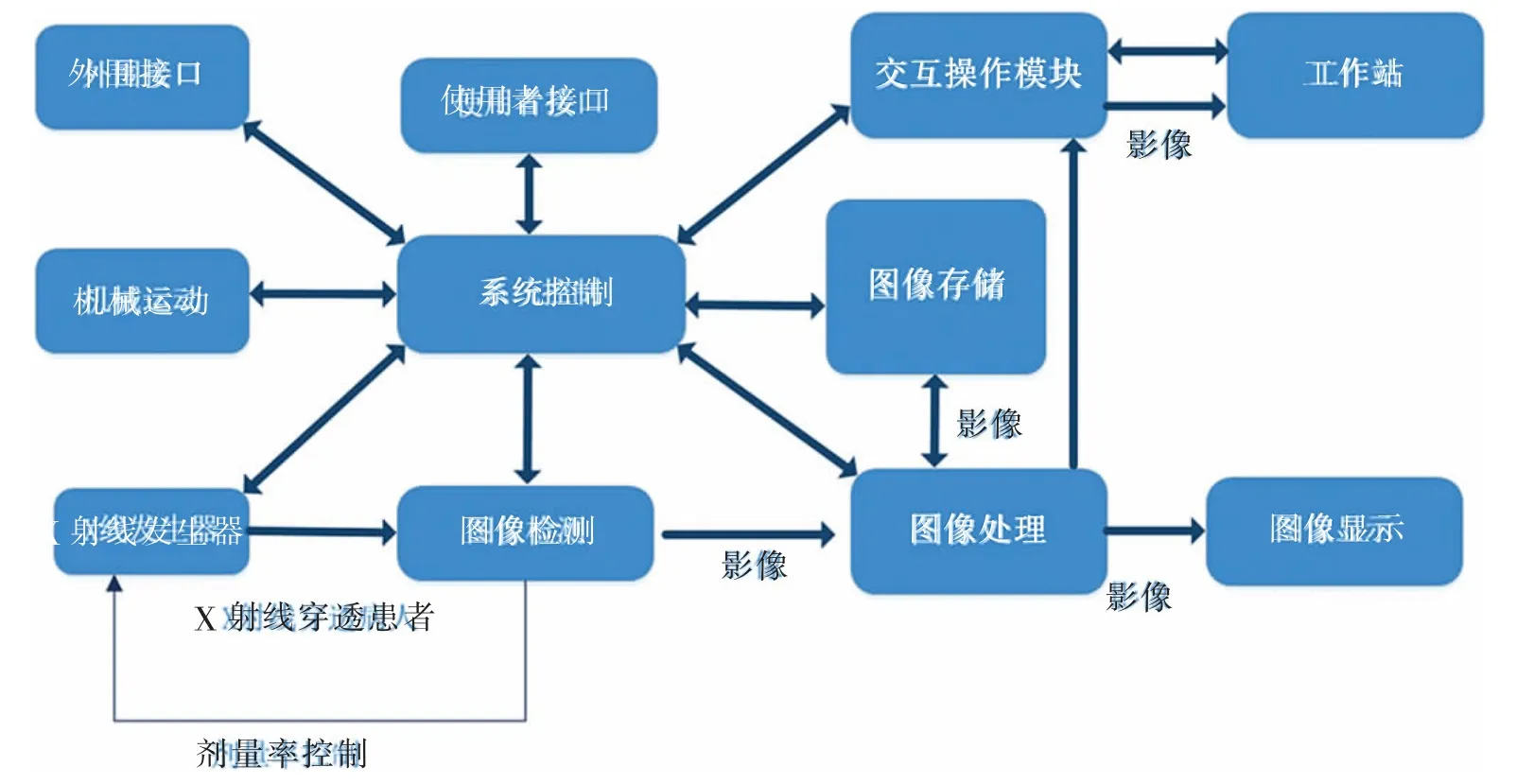
图4 Philips FD20 DSA 结构框图Fig.4 Structure diagram of Philips FD20 DSA
通过上述4 例故障的分析及处理过程可知DSA作为一个电子技术与计算机软硬件相结合的系统,对工程技术人员提出了更高的要求,不仅要具有电子技术基础和一些机械方面的技能,同时也要熟练掌握计算机软硬件技术[9,10]。 随着计算机技术的发展,越来越多的电路板被计算机板卡或相应的软件所替代,笔者所在医院原先使用的ALLURA 12 DSA 的机械运动控制是由一个控制柜内数块电路板来完成,而目前2台DSA 的机械运动都由1 台计算机控制, 故障率相较于原来的电路板提高了不少,所以日常使用中更加要注意预防性维护、保养工作[11,12],同时将机器中计算机的系统软件尽量用GHOST 或其他工具做好备份,以便软件故障时可以恢复,从而可以避免软件出现故障时繁琐的安装、设置工作[13]。
6 结论
作为集诊断与治疗功能于一体的大型影像设备,DSA 对设备使用者及工程技术人员都有严格的要求,且其一旦在使用途中发生故障将会对心内科等科室造成较大影响,所以需要工程技术人员能够熟练掌握设备的工作原理及发生故障后的应急处理措施,当然如医院能够有2 台以上的同类型设备,那对于发生故障时的患者转移及后续的设备维修都有很大帮助。作为医院的临床医学工程师,平时除了做好设备的维修工作之外,还要重视并积极参与预防性维护保养及质量控制工作, 才能保证设备检查及治疗的有效性、准确性,从而体现出工程技术人员的价值[14,15]。
猜你喜欢
小学科学(学生版)(2021年7期)2021-07-28 06:44:42
中国医学计算机成像杂志(2021年4期)2021-03-27 19:53:36
科技传播(2019年22期)2020-01-14 03:06:34
医药前沿(2019年27期)2019-11-07 07:28:08
中国医疗器械信息(2018年14期)2018-01-27 16:25:07
消费导刊(2017年20期)2018-01-03 06:26:40
生物技术世界(2015年6期)2015-08-15 00:43:39
衡阳师范学院学报(2015年3期)2015-02-10 06:02:23
疑难病杂志(2014年12期)2014-04-16 05:19:33
中国医疗设备(2013年6期)2013-07-24 18:37:18