架空乘人装置智能化无人值守系统的设计应用
2023-07-26 06:38:36徐琛
山东煤炭科技 2023年6期
徐 琛
(晋能控股集团微子镇煤业,山西 长治 046000)
1 工程概况
晋能控股集团微子镇煤业主斜井斜长561 m,半圆拱断面,净宽4.8 m,净高3.8 m,净断面积15.77 m2,倾角23°,落底标高+775.3 m,直接落底15 号煤层。井筒内一侧布置1 部DTC100/45/2×250 型带式输送机,另一侧布置1 部RJKY45-25/1000 型可摘挂架空乘人装置。该装置绳径20 mm,钢丝绳牵引力38.125 kN,电机功率45 kW,适应最大坡度25°,运行速度1.08 m/s,软启动,同时乘坐人员108 人,乘人间距12 m,最大输送效益388 人/h。
在主斜井架空乘人装置机头位置安装有操作台,每班安排有1 名岗位工对设备进行开停控制。以往在无人乘车情况下架空乘人装置也保持运行状态,造成设备过度磨损、浪费电能,设备各种保护传感器动作不灵敏。基于以上情况,对RJKY45-25/1000 型架空乘人装置进行升级改造[1-6],实现设备智能化自动化无人值守运行。
2 智能化无人值守系统的设计
2.1 智能化无人值守系统的总体方案设计
架空乘人装置集中控制实现无人值守、集中控制运行,采用PLC 控制器为控制器件。PLC 控制器通过CAN 总线对架空乘人装置电控系统中数据采集、通信、控制等运行过程进行监测,对越位、防脱绳、变坡点防掉绳、机头断轴检测、急停、张紧力下降、超速等传感器状态进行监测;地面集控中心对监测采集信息进行分析处理,对架空乘人系统进行智能化无人值守运行控制及安全保护,保证架空乘人装置运行的安全性和可靠性。智能化无人值守系统的总体方案设计如图1。
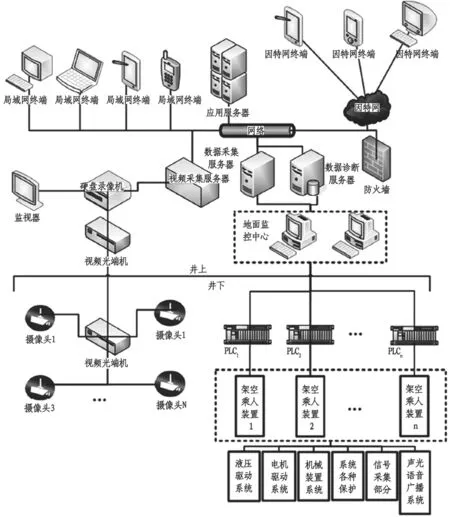
图1 智能化无人值守系统的总体方案设计
架空乘人装置智能化无人值守系统由地面集中控制中心、PLC 控制网络和智能感知平台组成。地面集中控制由中心操作台、PLC 控制柜、上位工控计算机、组态王软件、通信单元、架空乘人装置保护装置等部件组成,对架空乘人装置运行系统集中监视。PLC 控制网络对架空乘人装置直接控制与管理。智能感知平台对架空乘人装置运行状态的监测,对设备各种保护信号的采集与传输,采用通信电缆将井下PLC 控制分站与地面计算机进行连接通信。
2.2 架空乘人装置智能感知平台的构建
架空乘人装置智能感知平台主要是模拟人类视觉感知能力,为无人值守系统自主智能平台提供感知算法的验证工作,对“PLC 控制器+CAN 总线通信技术”进行结合,实施一体化的视频、音频传输和信息检测智能管理平台。具有远程操控、自动监控、远程故障诊断、综合保护功能。
2.2.1 架空乘人装置远程操控平台的构建
在地面构建架空乘人装置远程操控平台,通过安设架空乘人装置集控系统,综合智能感知、远程故障诊断、综合保护技术、智能集控技术实施智能化无人值守作业,架空乘人装置运行状态信息及现场环境和人员信息可以实时地反映在地面集控中心计算机显示器上。工作人员在地面集控中心能够实施远程一键式启停、故障自动修复等操作。在架空乘人装置关键区域(上下人地点、机头机尾下车点、变坡点和拐弯点等)进行实时视频监视,实时监视各关键区域原运行状态及现场安全情况,有效防范设备安全事故的发生,为安全事故的处理提供依据。
2.2.2 架空乘人装置综合保护技术的构建
PLC 控制器通过CAN 总线对架空乘人装置电控系统中数据采集、通信、控制等运行过程中的情况进行监测。在架空乘人装置上安装有各种保护传感器,检测设备的运行状况,将采集到的信息上传到PLC 控制单元。PLC 控制器对采集到的信息经分析处理后,通过程序处理与主驱动控制进行数据通信,通过声光语言广播系统做出预警。
主斜井架空乘人装置保护系统传感器配置情况:越位保护传感器2 个,防脱绳保护传感器6 个,变坡点防掉绳保护传感器4 个,机头断轴检测保护传感器1 个,打滑保护传感器1 个,急停保护传感器1 个,张紧力下降保护传感器1 个,超速保护传感器1 个。
2.2.3 远程智能故障诊断技术
在地面监控中心设置有远程智能故障诊断服务器,监测到设备发生故障,PLC 控制器信息接入到远程智能故障诊断服务器,按流程进行故障诊断。远程智能故障诊断系统工作流程如图2。

图2 远程智能故障诊断系统工作流程图
故障问题经远程智能故障诊断系统对比分析后,如果能够自行处理则处理结束后设备恢复正常运行;如故障不能自行处理,采用人机交互对故障进行录入,为人工处理故障提供依据,处理结束后设备恢复正常运行。
3 实践应用及效果分析
3.1 实践应用
微子镇煤业主斜井RJKY45-25/1000 型可摘挂架空乘人装置按上述方案完成智能化无人值守系统的建设,传感器安装情况如图3。

图3 传感器安装情况
主斜井斜长561 m,设备运行速度1.08 m/s,行人运送时间约520 s,设备运行延长时间50 s,整个设备智能化无人值守系统运行时间为570 s。当主斜井有行人连续运行通过时,智能化无人值守系统可收集到安装的红外传感器采集并传输而来的信息,此时系统可以调整无人值守系统运行倒计时时间,当最后一名行人通过后设备停止运行。若通行过程中发生停车情况,系统会自动按设定程序进入恢复运行阶段和设备故障检修阶段,直到最后将行人安全送到目的地。架空乘人装置智能化无人值守系统运行流程图如图4。

图4 架空乘人装置智能化无人值守系统运行流程图
3.2 效果分析
微子镇煤业主斜井架空乘人装置智能化无人值守系统从2019 年8 月运行至今,设备及智能化无人值守系统运行稳定,设备运行实现无人值守,可满足行人正常通行需求,设备无一起安全事故发生,设备运行安全性和可靠性较好。该架空乘人装置有效实现了设备的无人值守,设备运行中智能化自动化程度高、信号灵敏、节能降耗,矿井辅助运输效率和运输自动化管理水平大幅度提高。微子镇煤业主斜井架空乘人装置智能化无人值守系统项目的设计与应用成功有效。
3.3 效益分析
智能化无人值守系统应用后,可减少工作岗位1 人,按三班制计算,每年可节约人力资本6000×3×12=21.6 万元;设备每班可停车3 h,三班可减少运行9 h,设备使用电机功率45 kW,以电费0.65 元/kWh 计算,每年可节约电费为45×9×30×12×0.65=9.48 万元;对比以往每年可节约设备维修材料费用约10 万元。智能化无人值守系统的改造安装费用为11 万元。因此,对主斜井架空乘人装置智能化无人值守系统的改造应用具有较好经济效益。
架空乘人装置智能化无人值守系统的应用,有效提高了矿井的智能化和自动化水平,设备运行安全可靠,无一起安全事故发生。设备正常运行时间延长,故障率降低,大幅度改善了行人的通行环境。
猜你喜欢
机械管理开发(2022年3期)2022-05-14 02:49:30
当代作家(2021年10期)2021-11-09 23:12:00
隧道建设(中英文)(2021年6期)2021-07-05 06:37:40
作文小学高年级(2020年11期)2020-12-29 09:27:39
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
山东工业技术(2016年15期)2016-12-01 05:31:35
中国资源综合利用(2016年9期)2016-01-22 08:35:27