
一种面向时变射频干扰的时频特征预测网络
2023-07-20 00:38:32万鹏程冯为可童宁宁韦伟
西北工业大学学报 2023年3期
万鹏程, 冯为可, 童宁宁, 韦伟
1.空军航空大学, 吉林 长春 130000;2.空军工程大学防空反导学院, 陕西 西安 710051;3.空军勤务学院, 江苏 徐州 221000
射频干扰是对进入接收机内部的非感兴趣外部信号的统称,具有强度大、频谱范围广、时变性强等特点[1-2],严重干扰射频设备的正常工作。传统的射频干扰对抗方法一般考虑干扰进入接收机后的抑制和处理,例如滤波方法[3]、加权张量分解法[2]、自适应迭代法[4]、稳健张量主成分分析法[5]等,然而“先进入、再抑制”的方法从根本上限制了接收机对抗复杂干扰的能力。认知雷达(cognitive radar,CR)[6-7]技术的发展为对抗干扰提供了新的思路,通过认知方法掌握干扰行为的规律,可以使发射信号与干扰在某个维度去除相关性,从而最大限度从源头上阻止干扰的进入[8-9]。因此,CR对干扰行为了解得越透彻,在与其博弈的过程中就越容易获得主动权[10]。在动态变化的射频环境中,当前时刻的状态必然在下一时刻发生变化,基于当前状态做出的决策也必然难以适用于下一时刻。
因此,对时变射频干扰的频谱预测就显得尤为重要[11-12]。频谱预测是指基于先验知识和历史频谱信息获得未来时刻的频谱状态的估计,从而为相关设备的决策和行动提供有效信息支撑。但是,现有的频谱预测方法尚未考虑针对动态射频干扰的预测,诸多研究只针对独立的通信信道进行估计[13],分为基于模型的方法和基于数据的方法。前者的代表性研究是隐马尔可夫链模型[14]和参数/经验统计模型[9],这种方法的优点是结构简单、计算复杂度低,但对频谱特征的表示比较简单,无法用于复杂性强的情况;后者的代表性方法是人工神经网络,结构相对复杂,但得益于近年来计算能力的快速发展,这类方法的实用性正日益凸显,例如用于独立通信信道预测的长短时记忆网络(long short time memory,LSTM)[15]和用于区域通信流量预测的卷积LSTM(convolutional LSTM,ConvLSTM)[16-17],以及在此基础上发展起来的预测递归网络(predictive recurrent neural network,PredRNN)[18]。
在充满复杂性的电磁频谱空间,常规的基于独立信道的预测方法无法用于时变射频干扰,其不稳定的频谱机动特性加大了实时频谱预测的难度。然而,这类高机动频谱信号并非没有规律可循,通常射频设备都会有一定的发射模式,其射频行为具有一定的时间-频率相关性,如果能够在多维空间中对其相关性进行合理表征,就能够有效提取干扰的非线性变化特征,而这种时频特征与PredRNN用到的空时特征有很强的近似关系。本文针对快速时变干扰频谱的实时预测问题展开研究,提出基于滑窗模型的时频域二维相关性表征方法和基于该模型的频谱预测递归网络(spectrum prediction RNN,SPRNN)。通过文献[2]提供的干扰模型构建数据集并开展验证,结果表明所提方法能够准确得到时变射频干扰在将来的时频状态估计。
1 干扰的时频相关性表征
本文讨论的射频干扰基础模型来源于文献[2],是一种广义的宽带快时变射频干扰。从设备的基本原理出发,干扰行为一般具有一定的时间相关性,即当前时刻的状态并非独立于其历史和未来时刻的状态。从干扰的维度来看,时间相关性(例如一些干扰的周期性)并不能完全描述干扰特征,其动态特性还体现在频率状态的转移。因此,必须考虑时间和频率相关性统一建模、联合表征的问题,而时频图恰好包含了这2个维度的信息。假设接收到的快时间信号是x(t),则其对应的短时傅里叶变换的幅度是

(1)
式中:f是频率;h(t)是时间窗函数。X是一个二维时频图,能够反映一定的时频变化特征,但是X本身不是序列,无法直接作为ConvLSTM等空时预测神经网络的输入。
为了匹配空时预测神经网络的输入,考虑2种将X按照时间划分成滑窗时频序列的方式,如图1所示,序列中第n个元素为

图1 时频滑窗序列预测模型的输入和输出
Xn=X(t,f|t∈[(n-1)ΔT, (n-1)ΔT+Ts])
(2)
式中:Ts表示单个元素时间长度;ΔT表示滑窗步进时间。在滑窗模型中,相邻单元Xn,Xn+1之间的重合部分X(t,f|t∈[nΔT, (n-1)ΔT+Ts])可以看成是序列中相邻元素之间的刚体位移,而非重合部分可以看成是弹性体的产生和消失,以此体现出空时相关特性。
假设通过历史观测得到L个具有图像细节特征的连续时频图,相邻图之间包含有隐藏的非线性动态特征,频谱预测问题就是要从中获取未来M个时刻的时频特征,表示为

(3)
2 频谱预测递归网络
2.1 预测网络基础
PredRNN是空时预测网络发展的前沿,网络由多个空时长短时记忆(spatiotemporal LSTM,ST-LSTM)单元构成,对第l层ST-LSTM,其运算关系为
(4)

2.2 时频特征预测网络结构

针对上述问题,SPRNN主要进行了两方面的调整:①网络结构优化:频谱预测递归网络的整体结构(见图2),与PredRNN类网络相比,网络结构上在各个时间节点之间增加梯度桥结构(gradient bridge,GB),用于保留一定的历史信息,避免梯度消失;②损失函数优化;在ConvLSTM等空时预测网络利用整体MSE作为损失函数的基础上,更加关注预测部分的误差使之更匹配于频谱预测的情况。
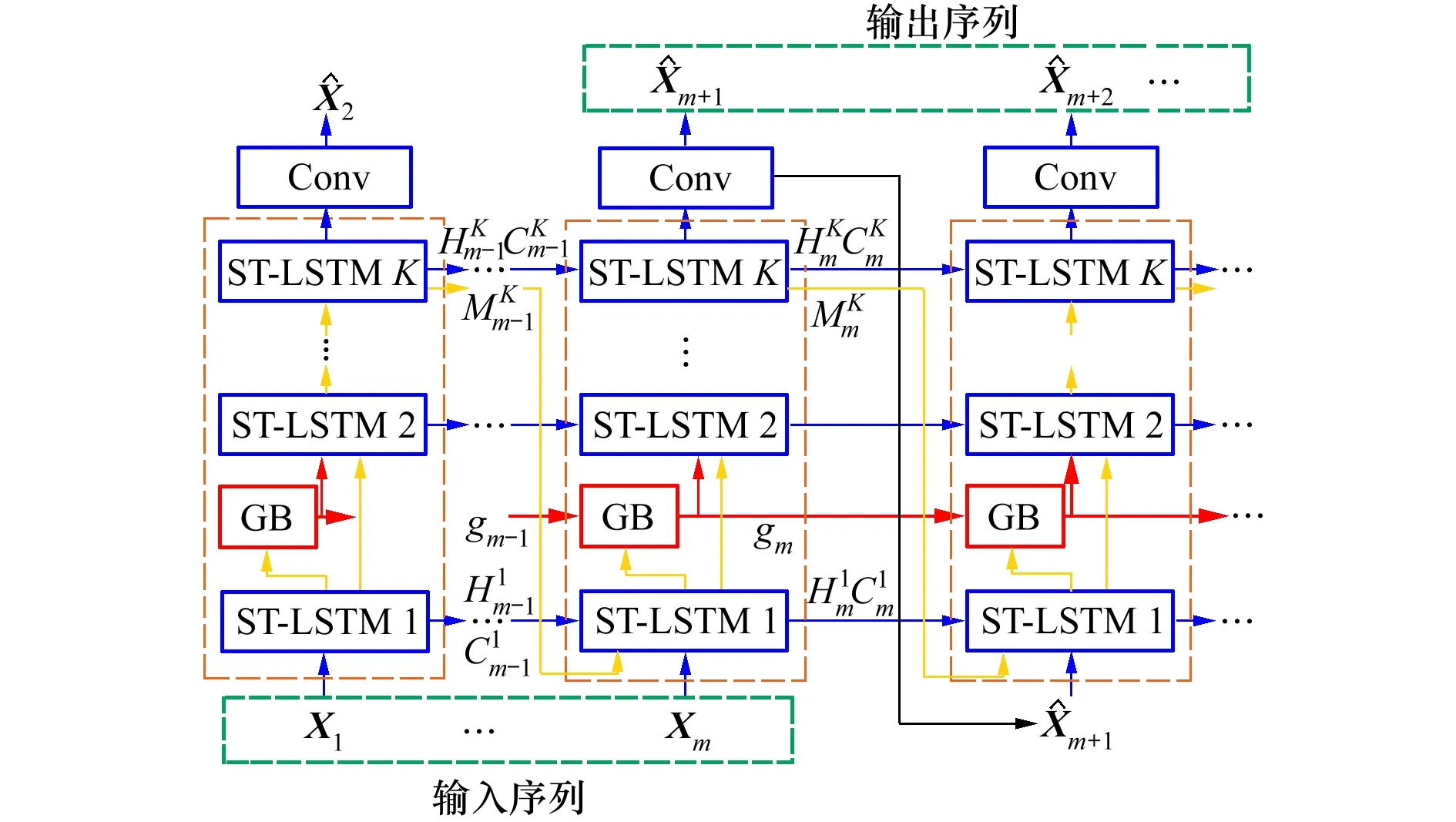
图2 SPRNN网络结构

网络中各节点的整体计算过程如(5)式所示:
(5)
式中:ST-LSTMv0(·)是第v0层ST-LSTM单元,计算过程见(4)式。SPRNN与PredRNN和ConvLSTM等预测网络在结构上最大的区别是增加一个梯度桥层GB(·),该层的计算过程如下所示:
(6)
梯度桥通过在时间节点上的跨越连接,最大限度地保留输入序列在时间维度的差异性特征,从而最大程度地避免梯度在多层级联网络传播过程的衰减现象。
2.3 损失函数适配
常规的预测网络的损失函数关注预测结果与标签的整体性误差,但这种方法与不适用于滑窗序列模型,原因在于该模型为了表征序列的频谱相关性,在数据中填充了一部分由于刚体位移产生的冗余信息,如图1b)所示,在期望的输出中预测得到的结果仅占一部分,另外一部分与输入序列存在部分重合。因此,更好的方法是偏重于关注预测输出部分的误差,同时整体性误差仍然需要被保留以满足相关性要求,由此重新定义损失函数
(7)

2.4 模型复杂度分析
SPRNN包含“离线训练”和“在线应用”两部分,其中网络训练是公认的计算密集过程,涉及到复杂的梯度传播和大规模的参数优化,需要一定的算力和时间支持;对于训练好的模型,应用时只需要对输入序列执行一次正向传播,模型复杂度对计算效率有决定性的影响,通常用浮点运算次数(floating-point operations,FLOPs)进行表示[19]。
在SPRNN中,用于局部特征提取的空间二维卷积操作是计算复杂度的主要来源,假设每个卷积核输出特征图维度为P2,卷积核维度为Q2,输入通道数分别为Cin和Cout,则进行一次卷积操作所需的FLOPs为P2Q2CinCout[19]。在ST-LSTM单元中,Cl,in=1,l=1或Cl,in=H,l=2,3,…,Cout=H,则每个单元中卷积操作的FLOPs为7P2K2(H+H2)。一个K层SPRNN的复杂度主要来源是卷积操作,其FLOPs总和为P2Q2(7KH+7KH2+4H2),可见复杂度与数据维度、网络层数和隐藏层数直接相关,借助高性能计算平台可以实现应用时的快速运算。
3 仿真验证
3.1 时变射频干扰数据集
根据文献[2]提供的宽带射频干扰模型生成训练和测试数据集,模型的基础是正弦调制(SM)和线性调制(CM)2种干扰形式

(8)
式中:fI是载频;μI和TI是xCM调制斜率和周期;βI,fI,I和φI是xSM的调制参数,BI(t)是一段经过窄带滤波的高斯噪声调制的幅度,nI是SM调制单元的数量。若干个上述元素的叠加构成了最终的干扰模型

(9)
式中:i和j分别是2类调制射频信号的个数, 为了更好地体现变化特性;xSM中采用了2种调制频率的叠加,使得频谱变化的非线性特征更加明显。
按照(8)和(9)式给出的干扰模型,基于表1列出的参数区间随机生成50组参数,从而产生50个干扰模型,其中45个用于训练网络,5个用于测试。滑窗间隔ΔT为2.5 μs,滑窗长度Ts为32 μs,按照第一节时频相关性表征的方法,用滑窗截取时频图序列作为网络的输入输出数据,每一个干扰模型对应的时频图被截取为300个连续时间帧,每20帧构成一组输入输出序列,则整个数据集共包含有750组时频序列。数据集的部分输入输出见图3。

表1 干扰参数区间

图3 输出结果对比
3.2 预测结果分析
网络的参数设置如下:SPRNN模型由4层ST-LSTM构成,每层的隐状态通道数分别为128,128,128,128,卷积核为5×5,GB层通道数为128,γ设为100。网络训练采用ADAM优化器,学习率设置为10-4,每次训练4批数据,输入长度为10,输出长度为10,共进行5 000次迭代,使用的GPU型号为RTX 3060。
由于目前缺少相同类型的研究,而SPRNN本质上属于空时预测算法在频谱估计领域的应用,因此将PredRNN及相关算法ConvLSTM、PredRNN-V2作为主要对比进行实验[16],输入数据均采用统一的时频滑窗序列,所有实验均在Pytorch 1.9框架内完成。
首先通过对比实验检验所提方法对于干扰预测问题的有效性。输入m=1~10的序列,得到的部分输出见图3(高对比度显示),其中上面2行分别是部分输入序列和预测输出的真值,下面是各个方法的预测输出对比。左右两侧分别是2组输出的实例。
从图3可以得出的结论有:①基于滑窗序列模型和空时预测网络相结合的方法能够预测未来若干帧数据的频谱变化规律,尤其是对周期性强、规律性明显的信号(如预测结果中的CM调制干扰,均可以给出明显预测值);②SPRNN得到的长时预测输出结果(m=18)明显优于其他几种网络模型,在时频图末端未产生模糊,仍然可以清晰地表现出时频特征,且与相应的真值保持了相当高的相似度。
采用均方误差(mean square error,MSE)、峰值信噪比(peak signal to noise ratio,PSNR)、结构相似度(structural similarity,SSIM)、图像感知相似度(learned perceptual image patch similarity,LPIPS)4个指标,以输出真值为参考,对测试数据集进行定量分析,结果见图4,其中每个预测步长对应的实验次数为75,不考虑噪声影响。随着预测步长的增加,各个指标所对应的性能均出现一定程度的下降,但是SPRNN的预测结果明显优于其他预测网络。对各个步长的预测指标结果取均值,结果见表2,该结果同样证明了所提预测方法的有效性。

表2 各步长预测结果的均值

图4 输出结果各指标对比
表3是各个算法的模型复杂度和完成单次传播所需的总时间的实验结果,其中SPRNN的复杂度和运行时间稍高于其他几种模型,对于所用的GPU运算平台(RTX3060)而言,增加的FLOPs几乎可以忽略不计。但是,所提方法对干扰的预测能力仍然是有边界的,一方面受限于网络完成一次正向传播的时间延迟,另一方面无法预测因为周期过短而导致时频特征无法分辨的干扰。如果可以使用算力更高的硬件平台,网络进行一次正向传播的时间会更短,能够大大缩减预测时延。
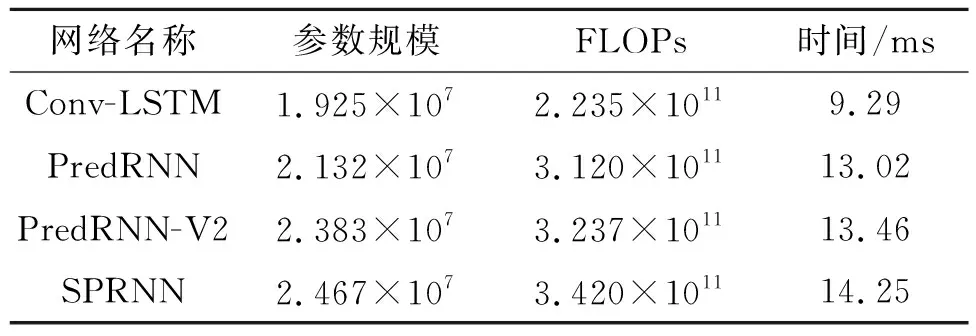
表3 算法复杂度对比
3.3 干扰实测数据实验
前面通过仿真验证了SPRNN的相对优势,为了进一步验证所提方法在实际条件下的有效性,在干扰实测数据的基础上进行实验。实验设备和场景见图5,由某型便携式干扰机生成干扰源,经过2个同型号C波段喇叭天线辐射和接收,由Ettus B210软件无线电设备完成数据采集,最后Ettus B210将接收到的射频数据传输给上位机进行存储和处理。接收通道的基本参数设置见表4。
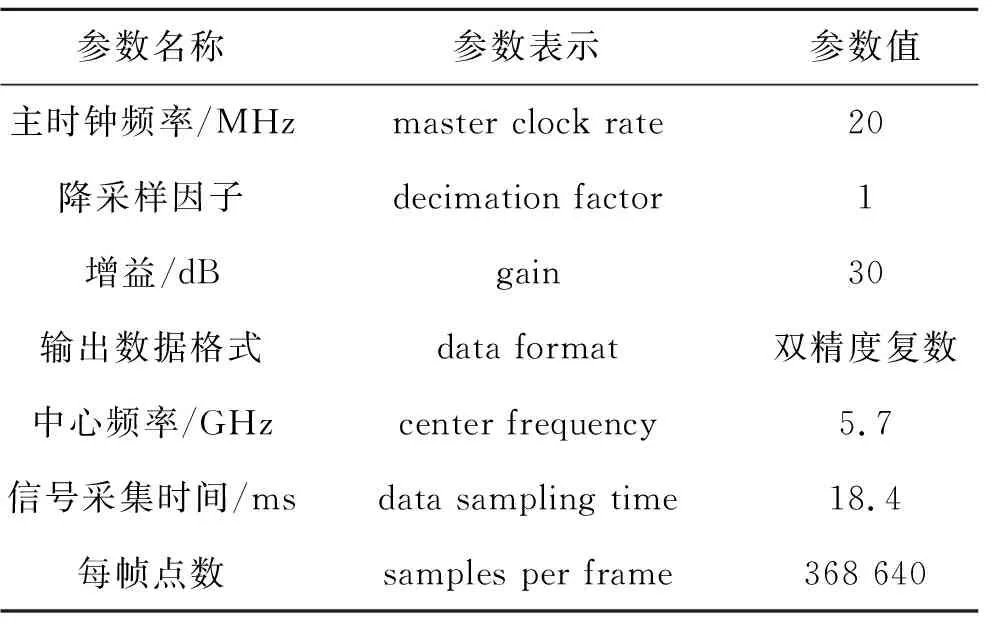
表4 接收通道的基本参数

图5 干扰测量实验设备和场景
对采集到的干扰数据做短时傅里叶变换,得到如图6a)所示的时频图,可以看到该设备产生的干扰以一定规律在其频带范围内机动,与干扰模型有一定的相似性。令ΔT=200 μs,Ts=4 000 μs,对时频图的维度进行调整使序列中每一个元素的维度为128×128。

图6 干扰预测结果
对于SPRNN,输入m=1~10的时频序列,当m=20时的输出结果如图6所示, 其中图6a)为真值,图6b)为预测结果,可见对于时频变化相对平稳的时变干扰,利用空时预测网络的方法可以得到高精度的预测输出。需要说明的是,由于实验设备的限制,实测干扰的时变特征有很强的周期性,利用ConvLSTM等网络也能得到很好的预测结果。
3.4 讨论
作为一种“数据驱动”方法,训练数据对预测结果有非常大的影响。如果在测试数据中添加另外一种样式的干扰(见图7a)),则预测结果将变差(见图7b))。根据神经网络的原理,要实现更广泛的应用,必须对数据库进行扩充,可以用迁移学习的方法,对模型进行小规模的参数调整,则可以得到与真值相近的估计图像(见图7c)~7d))。因此,与应用层面匹配度尽可能高的训练数据(通过测量或仿真得到)是网络成功预测的必要条件。

图7 数据集扩充前后预测结果
4 结 论
本文针对时变射频干扰的频谱预测问题,提出了通过滑窗序列模型表征数据二维相关性的方法,并通过增加梯度桥结构和改进损失函数构建出针对性的SPRNN,用来提高接收设备的频谱预测能力。根据干扰模型构造了数据集并展开实验,结果表明,所提方法能够有效预测一定时间内非线性射频干扰的状态变化。该方法预期能够为认知电磁频谱对抗的快速决策提供有效信息支撑。
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04 09:50:10
中央民族大学学报(自然科学版)(2017年2期)2017-06-11 07:14:54
智富时代(2017年4期)2017-04-27 17:08:47
广东石油化工学院学报(2016年6期)2016-05-17 05:17:43
火控雷达技术(2016年3期)2016-02-06 02:30:28
中国铁道科学(2015年4期)2015-06-21 06:46:08
浙江理工大学学报(自然科学版)(2015年10期)2015-03-01 02:54:43
舰船科学技术(2015年8期)2015-02-27 15:38:48
电测与仪表(2014年17期)2014-04-04 11:56:48
振动、测试与诊断(2014年6期)2014-03-01 01:14:47
