基于ROS 的ORB-SLAM2 建图算法研究
2023-07-13 10:36:12姜衍超李天顺孙佳东朱建军
电子制作 2023年11期
姜衍超,李天顺,孙佳东,朱建军
(吉林化工学院 信息与控制工程学院,吉林吉林,132022)
0 引言
同步定位与地图构建(SLAM)[1]技术自出现以来,始终是计算机视觉和机器人领域的重点研究内容之一,国内外高科技企业一直保持对其高度关注。SLAM 技术不仅能够实现地图的构建,还可以实时估计机器人的位置。视觉SLAM将相机作为主要传感器,相机不仅可以提供相对丰富的环境信息,而且价格相对较低,移动机器人通过视觉传感器在新环境中估计自身运动轨迹,实现对周围场景地图的重建,目前已广泛应用于VR、AR、三维重建、自动驾驶等场景。
目前经典VSLAM 算法有ORB-SLAM[2]、SVO[3]、LSDSLAM[4]、RTAB-MAP[5]等。ORB-SLAM 算法运用特征点法,所有步骤均使用ORB 特征,支持单目相机,鲁棒性良好,结构清晰及运行复杂度较低,自提出以来一直是研究者们的重点关注对象。Mur-Artal 等人[6]在原有算法基础上提出了ORB-SLAM2,该算法增加了双目相机和深度相机模式,提高算法适用性,通过深度相机可以直接得到机器人与周围环境的位置信息,减少初始化部分,提高算法精度以及准确性,但ORB-SLAM2只能构建稀疏的地图,过于稀疏的点云地图实用性较差,无法实现室内导航等实用性功能。针对ORB-SLAM算法的不足,高翔[7]修改增加点云地图线程,使ORBSLAM 能直接显示地图环境点云信息,但无法直接应用于机器人导航,未添加地图保存功能。稠密点云地图包含地图点数量多,信息含量丰富,包含地图点的x、y、z、r、g、b 等信息,通过稠密点云地图可以向其他地图进行转化,从而实现目标功能。由稠密点云地图可以转换为八叉树地图,能够支撑三维空间内机器人进行路径规划,如无人机,机械臂等[8];转化为二维栅格地图[9~10],可以实现二维空间下的移动机器人路径规划。
故本文在ORB-SLAM2 算法的基础上,引入构建稠密点云地图算法和实时构建二维栅格地图算法,生成稠密点云地图以及二维栅格地图,为实现室内移动机器人路径规划、导航、避障的功能提供技术支持。
1 ORB-SLAM2 算法原理
ORB-SLAM2 由跟踪、局部建图、回环检测、全局BA、位置识别、地图等部分组成,其中跟踪线程、局部建图线程和回环检测线程为主要的并行线程。跟踪线程(Tracking)根据到的每一帧图像的特征点估计相机位姿,经过局部地图跟踪进行对相机位姿优化,并判断当前帧是否能成为关键帧;局部建图线程(Local Mapping)在跟踪线程关键帧的基础上,利用局部BA 优化关键帧位姿和地图点,是用来管理和优化局部地图;回环检测线程(Loop Closing)通过计算关键帧与候选关键帧的位姿进行闭环融合,并执行位姿图优化来修正累积误差。算法原理框架如图1 所示。

图1 ORB-SLAM2 原理框架
2 改进ORB-SLAM2 原理框架
本文在ORB-SLAM2 算法的基础上,通过添加两大线程实现算法的改进,完成对周围环境的地图重建。改进主要框架如图2 各个部分所示,本文算法方法由如下三个部分构成,图中第一部分圆形框为原始ORB-SLAM2 算法部分,方形虚线框为原算法的基础上新增的部分。
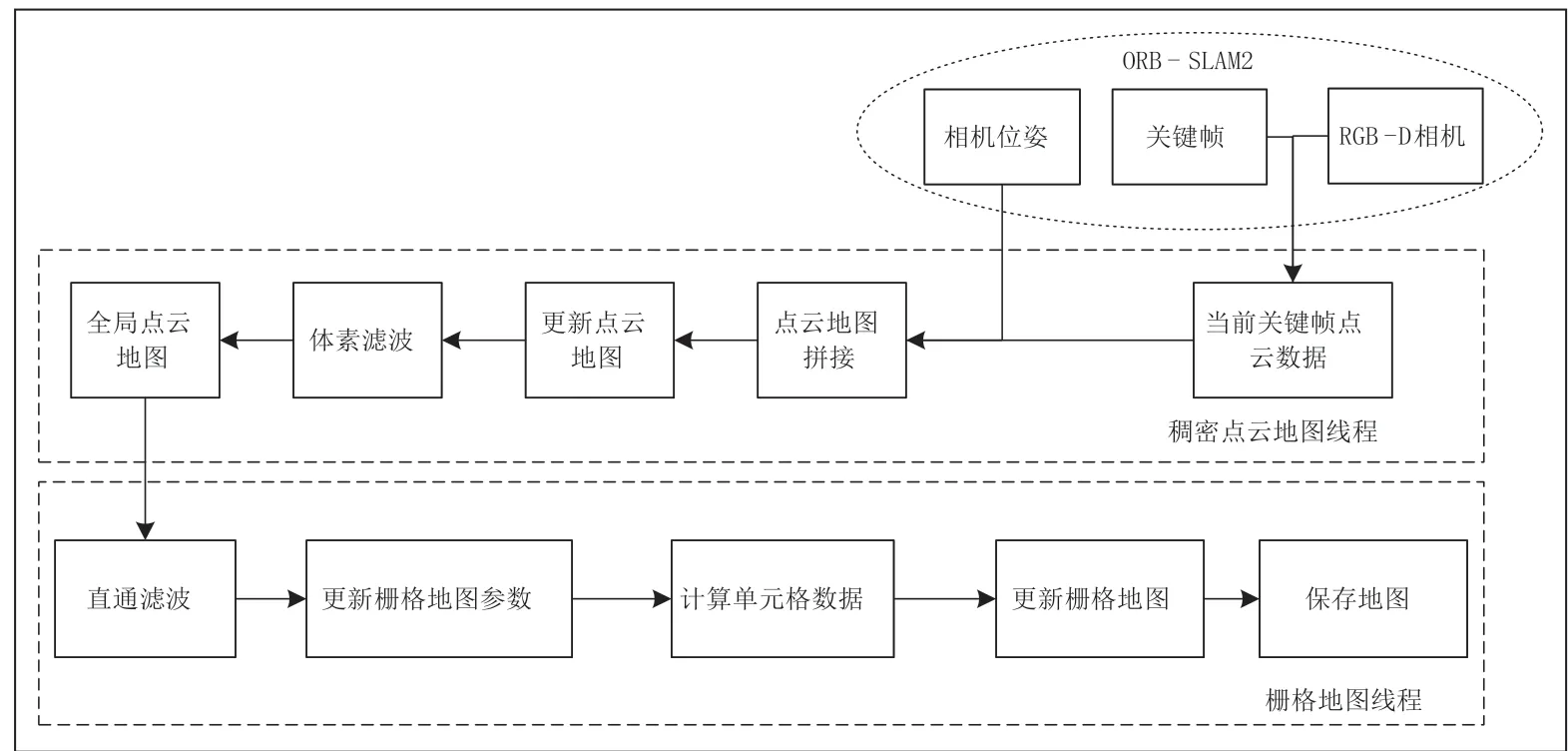
图2 改进ORB-SLAM2 原理框架图

图3 原理示意图
(1)RGB-D 模式的ORB-SLAM2 算法:获取关键帧信息和地图点。
(2)稠密点云地图算法:提取关键帧的地图点云数据,匹配各个关键帧点云数据进行滤波处理及稠密点云地图拼接。
(3)栅格地图算法:三维稠密点云向二维平面进行投影,依据占据栅格信息,重建环境的二维地图模型。
■2.1 稠密点云地图构建
由于ORB-SLAM2 生成的地图点云稀疏,结构不清晰,因此在ORB-SLAM2 的基础上通过稠密点云地图线程获取点云数据,实现稠密点云地图构建。构建流程如下:新建pointcloudmapping.cc 文件,设定参数初始值如滤波分辨率resolution、读取图像步长skipSpan、机器人相机高度robotCameraHeight 等。在ORB-SLAM2 生成关键帧的同时,根据当前关键帧位置、机器人姿态,结合深度相机获取的图像数据生成当前关键帧点云数据。信息采集过程中,机器人获取的彩色图像提供当前关键帧图像点信息的u(x)、v(y)坐标,深度图像可提供机器人与环境的距离信息Z 坐标,根据相机参数K 结合采集的RGB-D 图像信息,通过式1:
整理得式2:
得出像素点在相机坐标系下的X,Y,Z 坐标,即当前关键帧地图点的信息。为减少噪音干扰,在不影响点云地图结构特征的前提下,对构建的点云数据进行体素滤波处理,以体素中心点代替该体素区域点云数据,去除冗余点云,减少点云数据,形成当前关键帧点云数据。
利用ORB-SLAM2 的回环检测线程和ORB-SLAM2 生成的关键帧位置信息,将所有关键帧点云数据通过PCL(Point Cloud Library)进行拼接,实现全局稠密点云地图构建。并在ROS 中发布地图信息话题,通过Rviz 中的PointCloud2订阅话题信息,显示生成的全局稠密点云地图。
■2.2 栅格地图构建
为实现室内移动机器人的导航功能,构建栅格地图线程,将生成的稠密点云地图实时转换为栅格地图,并添加地图保存功能。栅格地图由大小相同的标准单元格组成,根据单元格的数据构成地图信息,单元格包含空闲、占据以及待观测三种状态。在栅格地图中,单元格Gird(i)的状态通过数值1、0 的概率来表示,当Gird(i)=1 时表示该单元格被占据,Gird(i)=0 时表示该单元格空闲,待观测状态不进行表示。如图4 所示,在占据情况下,表示该单元格在垂直方向存在地图信息;在空闲情况下,表示该单元格垂直方向没有地图信息,机器人可以通过;在待观测情况下,则表示传感器不能够到该单元格状态,即该单元格是否有地图信息情况未知。

图4 栅格地图
构建流程如下:根据ORB-SLAM2 稠密点云线程生成的点云地图,取所有点中最小的x、y 值和最大x、y 值,确定栅格地图的xMin、xMax、yMin、yMax,构建地图边界。对点云地图数据进行直通滤波处理,保留适配相机高度的点云数据,输出新的点云信息。统计单位栅格cell 内点的数量,设置阈值为5,当地图点的数量小于等于阈值时存储cell 的值为0,认为该栅格没有地图信息;当点的数量大于阈值时认为cell 垂直方向存在地图信息,占据整个栅格,存储cell 的值为100,根据cell值不同确定栅格地图信息,如图5 所示。
根据xMin、xMax、yMin、yMax 确定栅格地图的长和宽,根据不同位置单元格的数据构建栅格地图,将生成的栅格地图信息实时发布到ROS 的话题节点中,在Rviz 中显示栅格地图信息,通过map_server(地图服务器)将栅格地图进行保存。在仿真环境中导入地图文件,可启动移动机器人的路径规划功能进行目标点导航。
3 实验结果与分析
为了达到本文的目的,即通过改进ORB-SLAM 2 算法构建栅格地图,测试环境为笔记本电脑:Intel(R) Core(TM)i5-5200U CPU @2.20GHz,12G 内 存 与Ubuntu 18.04 操作系统。测试环境为Gazebo 搭建的室内仿真环境,使用Gazebo 中building editor 工具搭建仿真环境中所需墙体,调用模型库添加室内常见物体,如书橱、电视、门窗、壁画等,仿真环境如图6 所示。

图6 Gazebo 仿真环境
在仿真环境中,控制装配深度相机的室内机器人进行运动,对周围的环境图像进行采集,经过改进后的ORBSLAM2 算法,生成地图效果如图7~8 所示。图7 为ORBSLAM2生成的地图,图8为改进后ORB-SLAM2生成的地图。ORB-SLAM2 算法生成的稀疏点云地图墙体、角落等部分地图数据少,地图结构缺失,无法完整表示地图结构信息。算法改进后生成的地图信息量丰富、结构清晰,地图边界明显且完整,能够有效完成对仿真环境的地图重建。

图7 ORB-SLAM2 方法
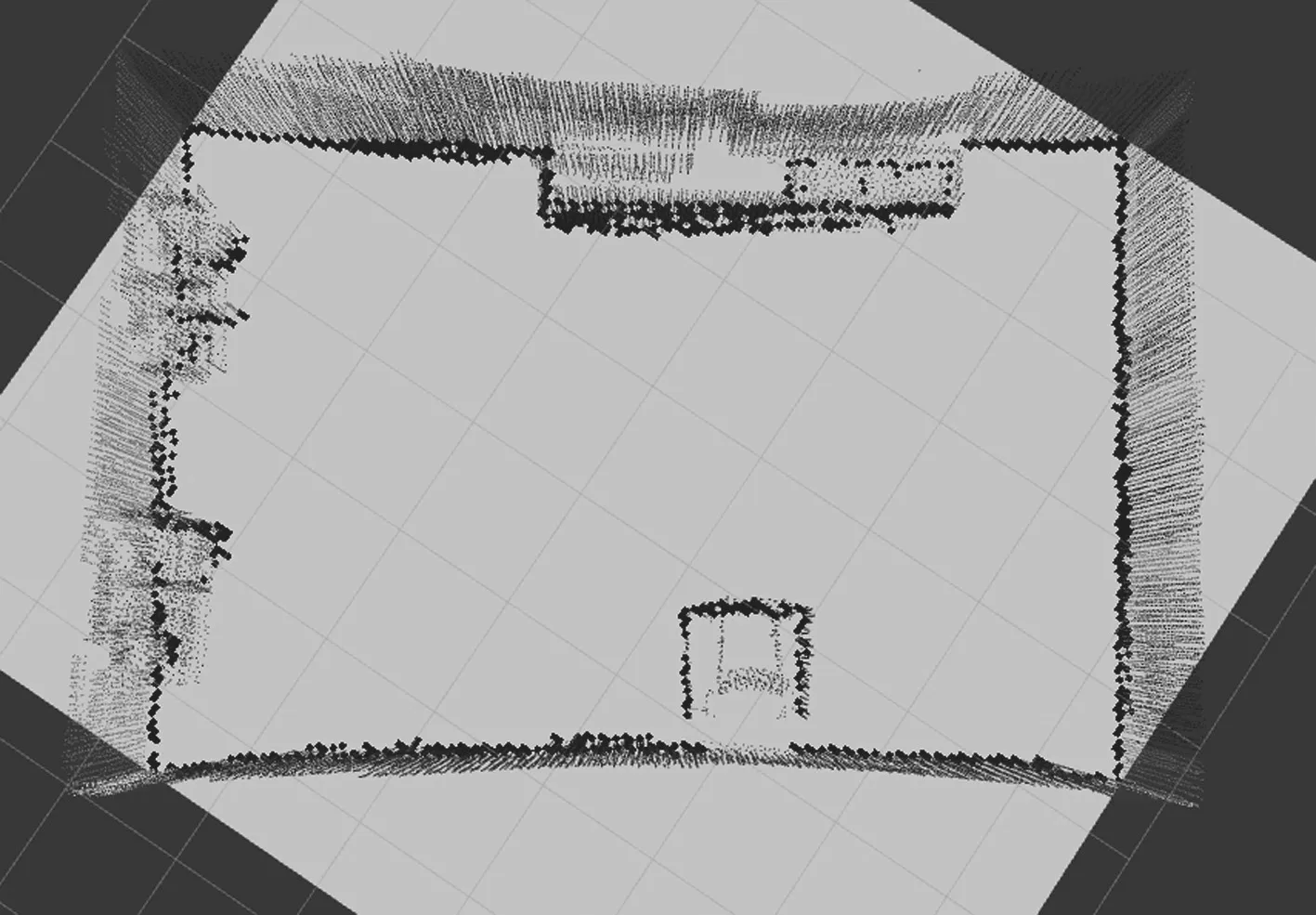
图8 本文方法
通过map_server 保存生成的栅格地图,保存的栅格地图效果如图9 所示。经与仿真环境对比,栅格地图结构完整,有效标记椅子、书橱、电视机柜等室内家具的地图位置信息。
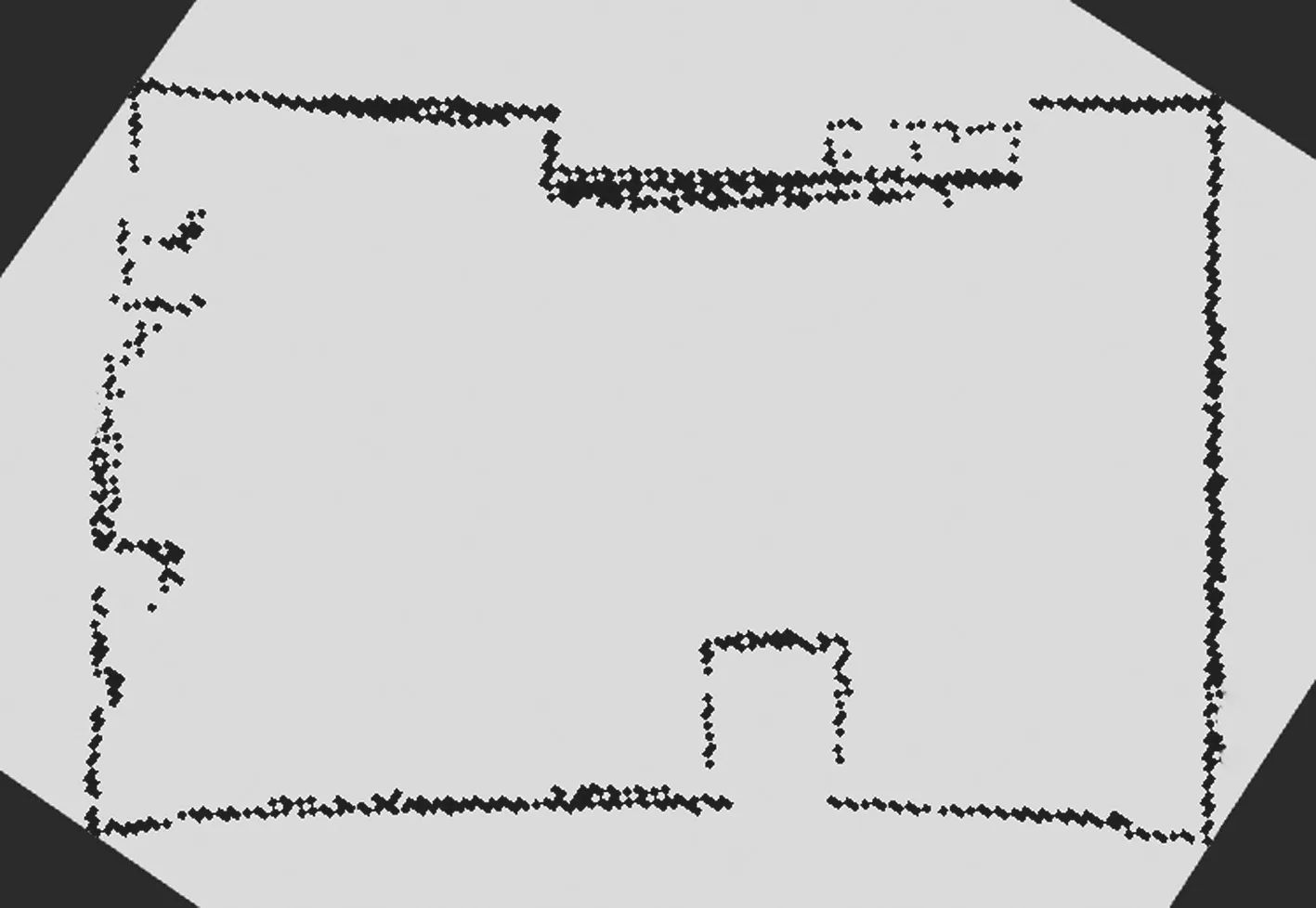
图9 栅格地图
实验结果表明,经算法改进后生成的点云地图和栅格地图结构完整,有效表示地图特征信息。在ORB-SLAM2 的运动模式下,调用生成的栅格地图,即.pgm 和.yaml 文件,利用ROS 的move_base 功能包可以配置路径规划算法,如A*、RRT、DWA 等,实现机器人的导航和运动控制。
4 结语
针对ORB-SLAM2 算法构建的地图信息量少、无法保存且无法应用到机器人导航功能等问题,本文提出一种改进后的ORB-SLAM2 算法,该算法在ROS 环境下,结合RGB-D相机获取的关键帧环境信息以及相机位姿信息,实时生成稠密点云地图与栅格地图。实验结果表明,本文算法生成的地图,既保留了原有环境的地图结构,又降低内存占用,可用做机器人的路径规划研究,为室内移动机器人导航和避障方面提供技术支持。
猜你喜欢
科技创新与应用(2021年31期)2021-11-09 13:11:18
数学大王·趣味逻辑(2020年6期)2020-06-22 07:48:15
数学大王·趣味逻辑(2020年5期)2020-06-19 08:49:28
西部皮革(2018年6期)2018-05-07 06:41:07
大连理工大学学报(2017年4期)2017-08-07 07:03:20
重庆交通大学学报(自然科学版)(2016年1期)2016-05-25 00:37:00
西北工业大学学报(2015年3期)2015-12-14 13:08:46
弹箭与制导学报(2015年1期)2015-03-11 15:32:23
文艺生活·中旬刊(2014年12期)2015-01-06 03:03:56
雷达学报(2014年4期)2014-04-23 07:43:13