
智能汽车关键技术及应用分析
2023-07-10 06:21:18解梦秋
时代汽车 2023年12期
解梦秋


摘 要:随着汽车工业的发展,智能化技术在车辆上应用越来越广泛,使得汽车越来越智能化,安全性、舒适性大大提高。智能汽车的发展已经由L0级完全人工驾驶逐渐向L5级无人驾驶方向发展。本文结合智能汽车行业及企业的发展就智能汽车中的关键技术及应用进行了详细分析,探讨了智能汽车发展的方向。
关键词:智能汽车 关键技术 应用
Analysis of Key Technologies and Applications of Intelligent Vehicles
Xie Mengqiu
Abstract:With the development of automobile industry and the application of intelligent technology in vehicle, the automobile becomes more and more intelligent, and its safety and comfort are greatly improved. With the continuous development of intelligent key technologies on the vehicle, the development of intelligent vehicle has been gradually developed from L 0-class fully artificial driving to the direction L 5-class of unmanned driving. Based on the development of intelligent vehicle industry and enterprises, the key technologies and applications of intelligent vehicle are analyzed in detail, and the development direction of intelligent vehicle is discussed, and the direction of the development of intelligent vehicles is discussed.
Key words:intelligent vehicle, key technologies, applications
1 引言
无论是传统的燃油汽车还是新能源汽车,智能化技术在车辆上的应用越来越广泛,极大地提高了驾驶人员驾驶的安全性、舒适性,使得汽车越来越智能化。随着人工视觉、生物识别、自然语言理解、深度学习等人工智能关键技术取得突破,开始在汽车工业深度应用,“智能化”已成为汽车工业技术升级的重要方向。
同时随着我国网络技术的发展,网络通信技术越来越多地融入到车辆,车辆可以与外界进行通信,比如与道路上其他车辆,与道路设施、与行人、与计算机云系统进行信息交换、共享,具备更复杂环境的感知、智能决策、协同控制等功能,可实现安全、高效、舒适、节能行驶,并最终实现无人驾驶的新一代智能汽车。
本文将就智能车辆的关键技术:环境感知技术、线控执行技术、高精度定位技术、通信技术、人工智能技术等进行详细分析。
2 汽车智能化关键技术
2.1 环境感知技术
智能汽车环境感知技术是利用传感器对车辆周围环境进行感知、对行驶路径进行识别、对驾驶员的驾驶状态和驾驶环境进行检测。目前已应用的感知方法有利用超声波传感器、毫米波雷达、激光雷达及摄像头进行感知或多种传感器融合等。
相机与人眼一样可以分辨障碍物外观信息,分辨力高,但易受外界环境影响,比如光线、雨雾天成像较差,易出现误判;激光雷达探测距离远、探测精度高且具备测距、绘图两大功能,还原三维特征,具備车辆自动驾驶功能所需要的多种要求。但由于价格昂贵,极端天气检测效果差等特点,选择激光雷达方案的车企还在少数;毫米波雷达不适于检测静止的目标,但毫米波雷达最大的优势是可以全天候工作,极端天气和恶劣的驾驶环境(如夜晚,雾天等)不影响其正常工作,但是其分辨率低,不能识别物体的种类;超声波雷达价格便宜,但检测距离近,且受温度影响较大,主要用于盲区监测,倒车检测。
智能汽车所在的驾驶环境不同于其他人工智能机器所处的工作环境,具有高速、复杂的特点,基于以上对各种传感器的分析,不同传感器的工作原理和采集的数据各不相同,对不同的驾驶环境的适应性也各不相同,各种主流的车载传感器有各自的优势与劣势,这使得单一传感器很难满足无人驾驶车辆的感知需求。基于多传感器融合的检测方式能结合各种传感器的优势,打破单一传感器固有的局限,为智能汽车后续的决策规划和车辆控制提供更可靠的信息,提高智能汽车的安全性。比如:若将相机和毫米波雷达两者进行传感器融合,将会得到高分辨率、全天候的外界环境信息。基于多传感器融合的智能汽车多目标检测技术也成为当下的热门研究方向。
小鹏P5车上采用双激光雷达,覆盖前方横向150°视野,最远探测距离达150m,具备天然感知环境三维信息的能力,测距精度厘米级,空间分辨率更高感知不受环境光影响,动态、静态物体识别能力全面提升,有效应对进出隧道、近距离加塞、道路施工等场景。32个感知传感器数量同级最多,融合视觉、雷达、高精度定位单元与高级驾驶辅助地图进行环境感知。感知能力更强,更适合中国复杂路况。
除此之外,与现有的摄像头视频识别,毫米波雷达、激光雷达类似,v2x技术使得系统可以获得其他车辆、行人运动状态的另一种信息交互手段,并且不容易受到天气、障碍物以及距离等因素的影响。v2x有助于为自动驾驶产业化发展构建一个车路人云协同的综合服务体系。
2.2 汽车定位技术
汽车定位技术是汽车智能化的关键技术。目前智能汽车主要通过全球导航卫星系统定位技术、惯性导航技术、毫米波雷达、激光雷达、摄像头来开展运动定位。全球导航卫星系统定位技术是一种基于卫星基础设施的,具有全球覆盖范围的无线电定位技术。 当前,投入运作的GNSS主要包括美国的全球定位系统GPS、俄罗斯的格洛纳斯卫星导航系统(GLONASS)、欧洲的伽利略系统(GALILEO)和我国的北斗系统(BDS)。美国开放GPS民用导航误差精度为十米量级。而汽车无人驾驶情况很复杂,尤其是市区路段,行人、非机动车密度太高,要保证安全驾驶,定位精度要求在米甚至厘米级别。这个精度等级几乎达到军用级,GPS显然不可能开放如此高精度定位。并且当GPS信号被遮挡、受外界大气层气流等的影响时会导致车辆定位不准确、定位位置更新频率慢等诸多出现的问题。 而我国的北斗系统可对无人驾驶开放高精度定位,充分保证高速、市区工况下无人驾驶的安全。其次最常用的就是惯性导航定位设备,在工作时不需要通过外界定位,不受外部环境因素干扰,在一定的时间内,可以以较高精度提供智能汽车的实时位置、姿态信息等相关数据信息。但是,随着工作时间的延长,惯性导航定位方式的误差会越来越大。而高精度惯性导航系统成本高。可见GPS定位和惯性导航单一定位都不能完全满足车辆的定位需求。
毫米波雷达用于车辆定位,探测距离较远,但探测角度范围较小,必须要安装多个雷达才可以实现对车辆周围全面的探测,成本也随之提高;激光雷达定位在雨雪、大雾、积水等恶劣条件下,检测精度将大幅下降,同时部件易磨损,相应维护成本也投入较大;摄像头定位对于光线比较敏感,在强光或黑夜条件下无法有效识别文字、颜色和图案信息,成本低但精度一般。
可以看出,不同定位方式各有优劣,智能网联汽车在实际应用中,一般采用多传感器融合的定位,既做到优势互补,也提高了稳定性,增强了定位精度。 L4无人车运营商常用的定位方案中多使用多线束的激光雷达和高精度的GPS/IMU。虽然这些高精密的传感器能够提供丰富的信息,但成本十分高昂,并且也无法满足车规的要求。 那么将惯性导航系统和激光雷达、摄像头等车载局部环境感知系统融合后,可以获取车辆与环境的高精度位置关系。在车辆行驶过程的侧倾、俯仰、横摆等运动情况下,惯性导航系统为车载传感器提供车辆的空间位置和姿态,用于修正传感器对环境的检测,建立更加准确的环境感知。禾多科技研发了面向量产的多传感器融合定位技术,采用了全车规级的低成本传感器,如GNSS、相机、低成本车规级IMU、轮速计等,以满足量产的需求。
另一种实现高精度定位的方法是采用高精度地图。高精度地图相较于普通地图来说,分辨率更高,可达厘米级。但由于高精度地图在制作过程中需要特别专业的感知、测绘设备,因此还难以被大规模推广。但如果要实现智能无人驾驶,车辆的定位就需要依赖高精度地图和高精度仪器对周围环境进行感知、路径进行规划、定位与控制,从而实现车辆高可靠性的无人驾驶。因此,高精度地图是实现自动驾驶车辆必不可少的一部分。
现在部分汽车已经能够达到L3、L4级别的自动驾驶,高精度地图市场化的需求因此更加迫切。
2.3 线控底盘技术
在智能汽车中,执行单元的执行效率及精度直接影响到智能汽车的智能化程度。随着控制技术的发展,线控技术在智能汽车底盘上得到越来越多的应用。
由于线控系统利用传感器获取驾驶人员意图或控制单元发送的指令信号,并将其转换成电信号送给控控制单元处理然后发送指令给电磁执行机构执行动作,全部以电信号实现驾驶人员意图的传递或自动控制,取消了传统的气动、液压及机械连接,所以具有安全、响应快、维护费用低、安装测试简单快捷的优点。目前智能网联汽车线控技术主要集中在以下几个方面:线控转向技术、线控制动技术、线控驱动技术、线控换挡技术和线控悬架技术等。
针对线控转向系统的研究,国外起步相对较早。英菲尼迪的“Q50”成为第1款应用线控转向技术的量产车型。在“Q50”中,既有传统的机械连接转向系统,又有线控转向系统,通过离合器进行切换,当线控转向出现故障时,还可以继续通过传统转向方式进行转向。
对于线控驱动技术从传统的油门控制改为电动汽车驱动电机的控制。加速踏板位置传感器获取踏板位置信息,送给控制单元,控制单元分析处理完信息后发送指令给节气门电机控制单元控制节气门,或驱动电机控制器控制驱动电机输出的力矩大小,实现对于车辆驱动力的控制。
线控制动技术现在主要有两种,一种是电子液压制动系统(EHB),一种是电子机械制动系统(EMB)。
电子液压制动系统EHB是从传统的液压制动系统发展来的,并未实现完全的线控。而是以电子元件替代了原有的部分机械元件,将电子系统和液压系统相结合,是一个先进的机电液一体化系统,其控制单元及执行机构布置集中。而电子机械制动系统EMB,完全摒弃了传统制动系统的制动液及液压管路等部件,由电机驱动产生制动力,驾驶员的制動意图通过传感器转换成电信号送给控制单元,控制单元控制每个车轮上安装的电机进行制动。EMB结构简单紧凑,制动系统的布置、装配和维修都非常方便,同时由于减少了一些制动零部件,大大减轻了系统的重量,更为显著的优点是随着制动液的取消,使汽车底盘使用、工作及维修环境得到很大程度地改善。由于EMB的性能优越,所以汽车厂家都在以EMB为主要研究方向。
线控控换挡依靠电驱动进行换挡,取代了借助于操纵档杆后驱动拉索变速器换挡的模式,更加高效准确地换挡。实现了具备自动变速器的汽车可以进行全自动泊车。电子换挡系统相对于过去的机械换挡结构来说质量更轻,占据空间面积更少,结构设计布置灵活;如图所示。同时线控换挡能够有效保障换挡过程中的稳定性和安全性。
上汽通用汽车公司的凯迪拉克、别克等部分车型及奔驰、宝马、奥迪等豪华车企业也都采用了电子换挡系统(ETRS)。
线控悬架系统(Suspension By Wire),也称为主动悬架系统。 可根据路况的不同实时进行悬架参数调节,大大提高其缓冲减震效果。1980年,BOSE公司成功研发了一款电磁主动悬架系统。1984年,电控空气悬架开始出现,林肯汽车成为第一个采用可调整线控空气悬架系统的汽车。目前,宝马汽车安装的“魔毯”悬架系统,凯迪拉克汽车安装的MRC主动电磁悬架系统,以及自适应空气悬架系统,均属于线控悬架系统的不同形式。
我国对线控汽车的研究起步相对较晚,与国外差距较大,各高校对线控系统的研究主要以理论为主。长城智慧线控底盘2019年开始研发,2022年全球首发,线控制动系统采用EMB方式,电子机械线控制动系统,实现全球首个量产。实现了高性能,制动时间缩短0.35S,制动距离缩短4.8m,提高续航里程提升20%。制动精度更高。其次线控转向系统,彻底摒弃转向器与转向管柱之间的传动轴,支持方向盘的收折,隔绝路面震动,用模拟单元模拟路感,是国内首个支持L4+以上自动驾驶的转向系统。软硬件全自主设计,拥有100%自主产权。线控转向方面,转向力提升了37.5%,实现可变传动比。具有单个系统的冗余备份。在制动、转向方面从电源、传感器、控制器进行了三重备份,同时还可以跨系统进行调节,当转向失效,可以利用单侧制动方式转向。当制动失效时,驱动电机变成发电机产生阻力进行制动。可以实现个性化定制;可以实现自学习的习惯;支持OTA 在线升级。
2.4 先进通信技术
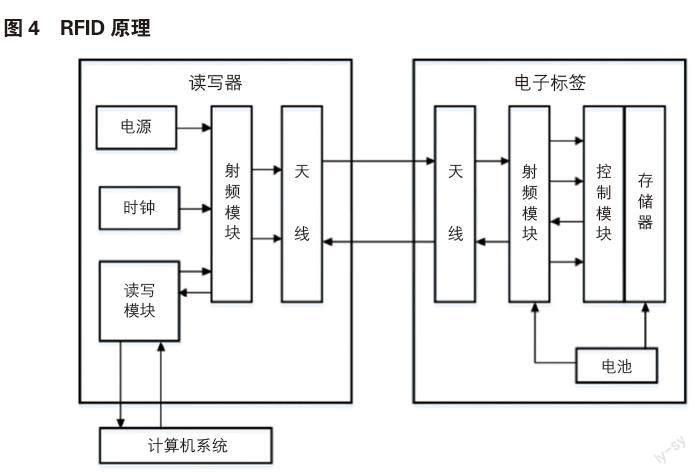
车联网及通信技术在智能网联汽车中的应用非常广泛,根据通信距离不同有近距离通、中短距离、远距离通信技术。目前车辆上应用的近距离通信技术主要有RFID、NFC等。
RFID射频识别技术在我们日常生活中应用较多,根据电子标签有无电源,识别距离及范围也不相同。比如:身份证识别、交通卡等利用了无源电子标签识别技术。有源RFID识别距离比较远,比如可以用于ETC。
NFC技术是一种近距离连接协议,提供各种设备间轻松、安全、迅速而自动的通信; RFID技术更多的被应用在生产、物流、跟踪和资产管理上,而NFC则在门禁、公交、手机支付等领域内发挥着巨大的作用。
2019年12月,华为钱包与比亚迪DiLink联合发布基于NFC的智能“手机车钥匙”,将搭载比亚迪宋Pro车型,实现解锁和上锁等一系列动作,为用户提供更便捷智能的数字车生活。2020年3月,小米手机也与比亚迪DiLink联合发布了手机NFC车钥匙功能,还可以读取车辆的状态数据。
LTE-V技术是大唐电信基于TD-LTE技术而推出的具有中国自主知识产权的车载中短距离通信技术,支持在车辆与车辆(V2V)、车辆与基础设施(V2I)、车辆与行人(V2P)之間快速组网,构建数据共享交互桥梁。
华为LTE-V车载终端成为国内首个在开放道路上成功应用的LTE-V车联网终端,通过集成千寻位置的亚米级定位服务及融合惯导算法,为汽车提供了车道级的定位能力。
5G移动通信技术即第五代移动通信技术,是最新一代蜂窝移动通信技术。网络延迟低于1ms,数据传输速率可达10Gbit/s,比4G LTE网络快100倍。可以为智能汽车提供更高精度的定位,更快速的计算,保证智能汽车做出更为合理的路径规划和拥有更快的紧急情况处理能力,保障乘客的人身安全。由此可见,随着5G技术的不断发展,能进一步加快其应用到智能汽车的脚步,也能进一步推动智能汽车市场的发展。
2.5 人工智能技术
人工智能技术在车辆上的应用使得车更智能,汽车能够与人进行交互,根据人的需求做出判断与满足。现阶段人工智能化在智能座舱的应用是一大趋势,如图6所示,车载语音交互系统、视觉交互系统、智能座椅、导航以及空调系统控制等。即利用车联网与智能化技术结合车外环境、车内视觉、语音识别、手势识别、多维度传感器、AR等多种感知手段,基于强大的计算能力,全面自主控制汽车硬件,将车辆打造成智能“管家”,实现在视觉、嗅觉、触觉、包括语音等各个方面和车体的沟通,全方位提升乘员极致体验,同时各类手势的识别也逐步完善,通过一个简单的手势传递出作者的驾车意图,实现人车交互,从而达到智能化汽车驾驶效果。此外,人脸识别技术也逐步植入汽车系统中,通过人脸生物特征识别,可以更好地实现人车交互,完成汽车智能化驾驶。
3 总结
智能化技术的应用,使车辆的动力系统向着三电化方向发展,车辆的驾舱向着智能座舱方向发展,车辆的底盘向着线控化方向发展。智能化技术已经渗透到车辆的各个系统,智能化技术的作用已经由ADAS辅助作用逐渐转向主控,代替人类来驾驶车辆,车辆正朝着无人驾驶方向发展。由于我国政府对于智能汽车发展的大力支持,在我国很多城市都已经建成了智能汽车测试场地,发放了智能汽车测试牌照,智能汽车的路面测试已经走在世界前列。随着智能汽车的关键技术的不断成熟及应用,智能汽车将向着无人驾驶方向不断发展、迈进。
基金资助:智能网联新能源汽车研究中心(项目编号:2022-PTW-01)。
参考文献:
[1]姬晓婷.智能汽车成传感器企业布局重点,中国电子报/2021年/12月/31日/第007版.
[2]王海,徐岩松,蔡英凤,陈龙.基于多传感器融合的智能汽车多目标检测技术综述汽车安全与节能学报,第12卷 第4期,2021年.
[3]陈豫蓉.5G与北斗高精度定位融合发展趋势分析[J].电信工程技术与标准化,2020,33(04):1-6.
[4]黄东风.人工智能在汽车驾驶技术领域的应用与发展[J].时代汽车,2022年.01期.
猜你喜欢
今日农业(2021年8期)2021-11-28 05:07:50
今日农业(2021年13期)2021-11-26 11:50:54
现代畜牧科技(2021年3期)2021-07-21 08:41:50
落叶果树(2021年6期)2021-02-12 01:29:26
科技传播(2017年5期)2017-04-25 23:28:30
电子技术与软件工程(2017年3期)2017-03-22 02:18:00
科技视界(2016年20期)2016-09-29 12:03:12
科技视界(2016年20期)2016-09-29 11:47:01
科技视界(2016年20期)2016-09-29 11:02:20
大众理财顾问(2016年8期)2016-09-28 13:45:18
