基于AI的货车盲区自动监测报警系统*
2023-07-09 07:21:30高登王志仁王瑞吕秋萱张爱敏
汽车文摘 2023年7期
高登 王志仁 王瑞 吕秋萱 张爱敏
(成都工业学院,成都 611730)
0 引言
2021 年中国道路交通事故货车死亡人数为1.66万人,2021 年中国交通事故发生数量为24.8 万起,由其造成的直接财产损失为13.46 亿元,交通事故事件受伤人数远远大于死亡人数,而大型货车出现交通事故相比于小汽车出现事故的概率最高、危险系数最大。而大型货车因右转盲区而导致事故发生概率几乎为1[1]。
为防范大型货车的右转事故,本文提出基于人工智能(AI)的大型货车右转盲区警示系统,通过在车头安装高清摄像头监测货车在右转或等待交通信号灯时,货车右侧盲区内的危险,通过AI 中控台连接到屏幕反映出的视觉信息让驾驶员做出正确的判断和操作。在车辆的右侧安装毫米雷达,用于探测右侧盲区,AI 系统自动通过计算、分析和处理来自传感器接入端接收的数据,做出判断并自动发出指令到输出端。若AI 中控台判断出危险,将通过蜂鸣振动装置与外置双语音报警装置发出声音,通过预警使司机做好防范措施,同时提醒行人及其他大型货车的动态,提醒其注意避让,有效地规避事故的发生。
1 图像装置与控制系统
1.1 系统组成及原理分析
系统由一个高清摄像头、蜂鸣装置、外置语音播放器、一块高清液晶屏幕、一块内置AI中控板组成。
中控台系统内置AI人工智能系统,可自动处理和识别信息,其效率更高效,可实时分析来自摄像头拍摄和雷达探测的信息。中控台自动计算出右侧盲区内的安全性,并与理论设置安全范围比照。可实时通过与中控台连接的屏幕装置,驾驶员可观察到影像信息、探测信息和工作状态信息。
1.2 摄像头安装位置
高清摄像头安装于车头右前方,能够覆盖整个右转盲区的全部区域。内置AI 中控板安装于液晶屏幕背后,负责实时接收信号、处理并分析数据,经判断输出相应的命令信号。蜂鸣装置安装在驾驶舱,负责提醒驾驶员。外置语音播放器安装在车头右侧,负责语音提示车外行人。高清液晶屏幕安装在货车的驾驶台,保证驾驶员正常驾驶的情况下实时准确地观察盲区里的动态,图1为中控台屏幕展示。
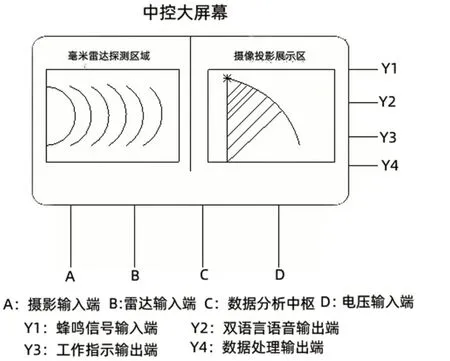
图1 中控屏幕展示
1.3 工作原理分析
在大型货车进行右转时,摄像头覆盖整个右转盲区范围,并将画面实时传回中控台,经摄像输入端显示在液晶屏幕上,同时也经雷达输入端将盲区内雷达探测到的信号范围描绘在屏幕上[2],其设计数据分析中枢与之连接的AI中枢板,对接收到的图像和雷达信息进行计算分析[3],与预先设定的安全范围进行比照,传回的数据处理后传到输出端。
当出现安全范围之外的情况并可能发生碰撞时,系统会命令连接蜂鸣信号输出端并打开开关,安装在驾驶室的蜂鸣装置会发出蜂鸣声,提醒驾驶员减速避让和注意观察屏幕的图像信息。与蜂鸣装置串联的外置双语语音输出端也同时打开开关,通过中英文连续输出方式提醒右转盲区内其他车辆与行人将引发危险,勿再前行。当下一段信号传递到输出端并输出危险消失信号,输出信号的开关将自动关闭,停止发出蜂鸣和双语言语音报警。中控台还通过电源电压输入端连接大型货车电源箱,为装置实时供电,供整个系统工作,驾驶员可以通过观察工作指示输出端连接的LED灯装置,判断整个系统是否处于正常工作状态,以便于及时维修和保护。
2 雷达探测系统
货车由于车体较大、驾驶室距离地面高的结构特点存在多处视野盲区,因此针对这一情况对大型货车的视野盲区进行了分析,如图2所示[4]。
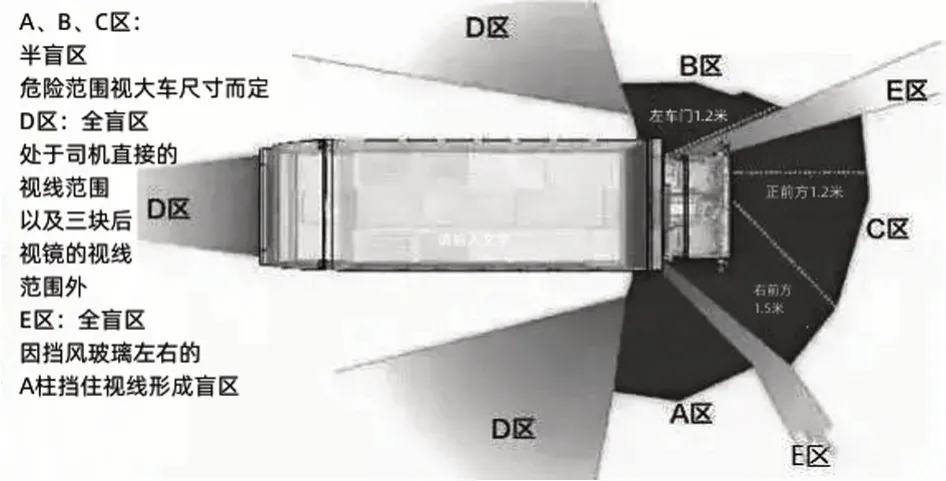
图2 视野盲区展示[4]
大型货车的主要盲区在于汽车的前侧和两侧区域。雷达安装位置是探测系统的重要部分操作比较精密[5],为了提高汽车安全性,根据汽车车身尺寸的测量数据,制定了一套毫米波雷达安装计划,安装情况如图3所示。
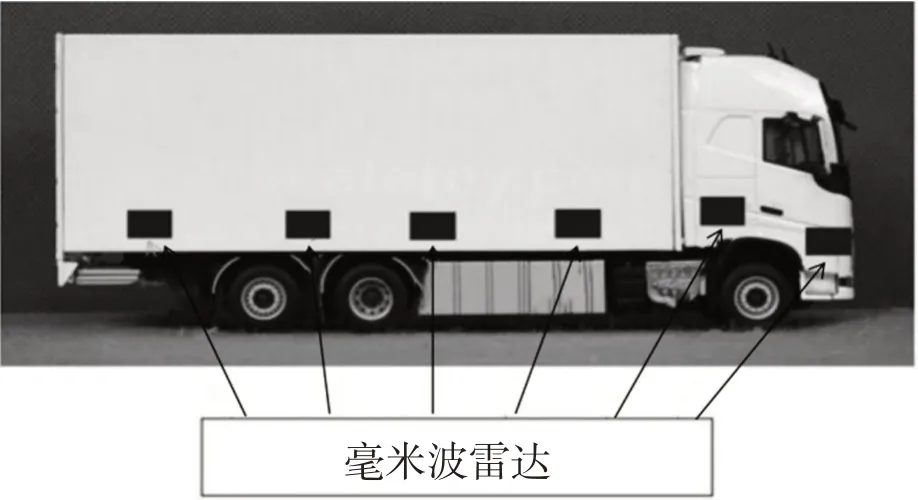
图3 安装位置示意[5]
2.1 测速原理
毫米波雷达具有以下2种测量速度方式:
(1)根据Doppler 原理:当盲区内物体与雷达信号发生源之间发生相对位移时,使发射信号与回波信号之间存在时间差,在频率上产生多普勒位移设fd(图4)。
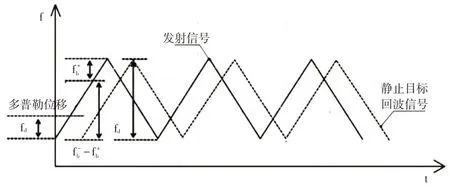
图4 测速Doppler原理[6]
(2)可以跟踪到测量目标的位置,通过微分方法测速[6]。但此种方式需要更先进算法,不利于低成本普及。
1.2 测距原理
毫米波雷达调频器通过天线发射微波信号,发射信号遇到盲区内物体后经物体的反射会产生回波信号(发射信号与回波信号相比形状相同、时间上存在差值),以雷达发射三角波信号为例,发射信号与回波信号对比,测距原理如图5。
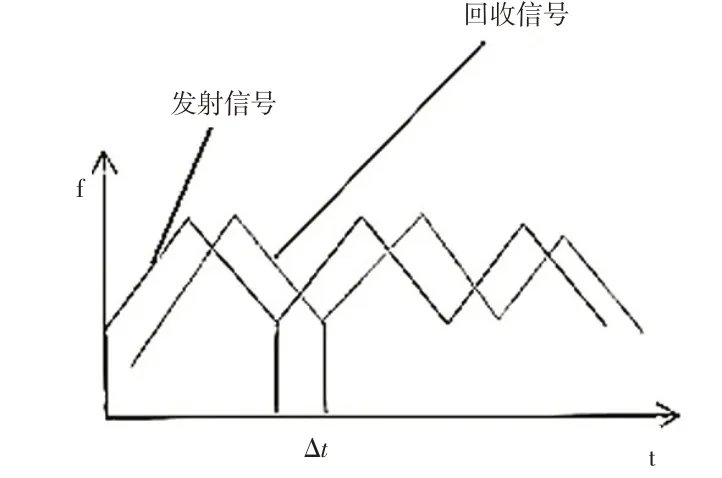
图5 测距原理
毫米波雷达测距公式如式(2):
式中,t为雷达波飞行时间;c为光速;s为毫米波雷达与物体的距离。
2.3 判断位置
通过毫米波雷达发射出毫米波后,遇到被盲区内物体反射回来,如图6。
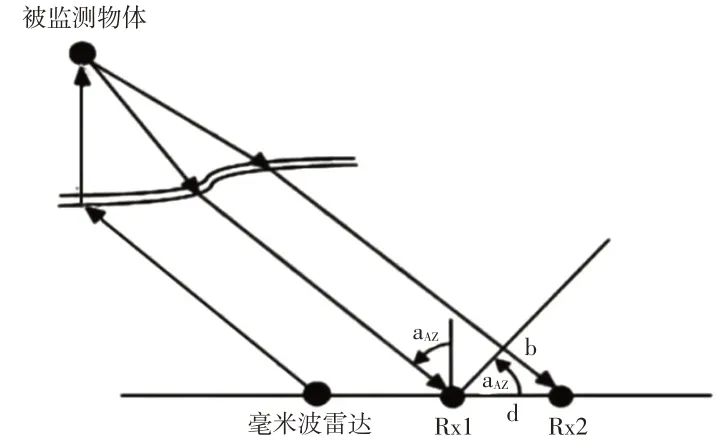
图6 方位角原理
通过毫米波雷达并列的接收天线,收到同一物体反射回来毫米波的相位差,就可以计算出盲区某一物体的方位角(αaz),一个毫米波雷达上就有4条接收天线RX1~RX4。假设是测量毫米波雷达接收天线RX1,和接收天线RX2之间的几何距离d,以及2根毫米波雷达天线所接收到反射回波的相位差b,然后通过三角函数计算得到方位角αaz的值,即
通过上述3 种原理,测出盲区内物体的速度、距离、位置,通过传感器传输到驾驶室中控台,再运用AI数据处理器对数据进行处理,AI最终向货车司机发出避险警示。
与普通的雷达相比,毫米波雷达具有更好的角度分辨能力,对于测量目标的速度和距离也有更高的测量精度。毫米雷达的探测区域是如图7 所示的扇形区域[7],它的主要构造包括控制和处理单元、信号传递中控台、图像装置和预警提示装置,探测区域如图7 所示。
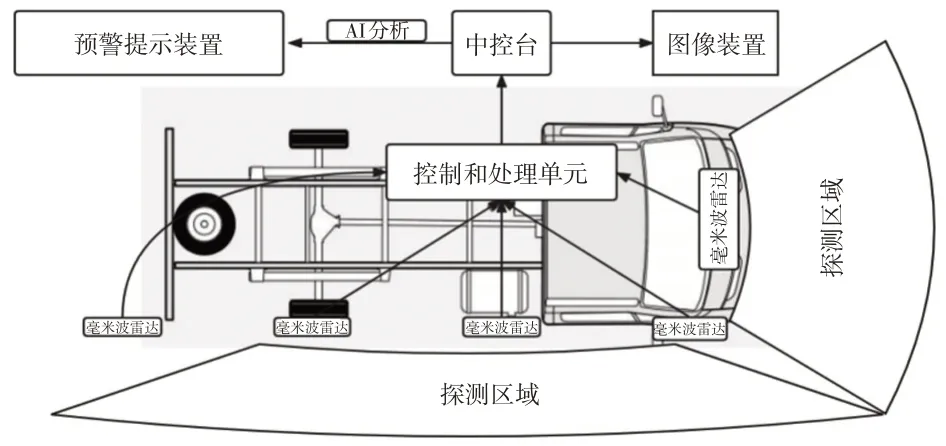
图7 探测区域示意[7]
4 预警提示装置
预警监测系统采用一体化创新设计,摄像头上雷达通过中控台智能动态检测右转盲区内的其他车辆和行人。
预警提示装置同时对货车驾驶员和盲区人物进行双向预警。通过液晶屏背后AI 中控台连接蜂鸣振动装置和双语音报警装置实时自动输出,预警监测区域如图8所示。
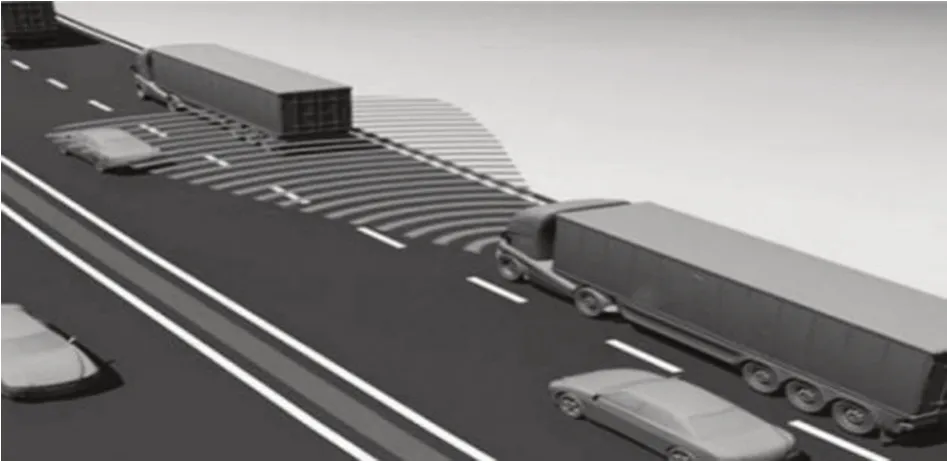
图8 预警监测区域
预警提示装置能通过AI自动控制并实时提醒,不但帮助大型货车驾驶员在右转时提前知悉右转盲区内行人和其他车辆动态,而且提醒行人和其他车辆注意左后方驶来即将右转的大型货车动态,需注意观察并小心通行。目前应用的预警提示装置,主要是在车辆上安装摄像头来实现盲区监测,但在夜晚或者光线较差的环境下,在对向车辆发出来强光的照射下,摄像头采集到的图像模糊,对驾驶员的辨别会造成影响[8],或是基于原有摄像头的基础上,加之监测控制相连的蜂鸣报警器,但安装在车内的装置声音仅能提醒驾驶员,驾驶员由于反应时间和大型货车制动惯性很难第一时间降低车速,且由于车后的隔绝和货车行驶的振动噪声,行人和其它车辆根本没有接收到预警信息,便无所畏惧地继续前行,因此危险性依然存在[9],有必要提出有针对大型货车盲区双向预警方案。右转盲区系统的工作原理如图9所示。
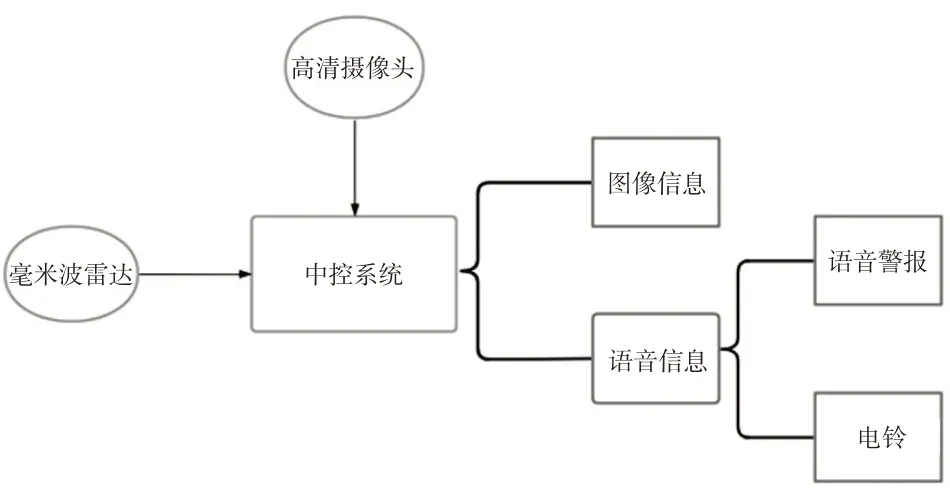
图9 系统工作原理展示
盲区监测报警装置的硬件设计主要包含4 个部分:电源部分、车外传感器、报警器和AI中控台[10]。电源部分连接整个装置电压,车外传感器连接的摄像头和雷达负责采集数据,同时把数据传递到中控台,由中控台进行处理数据并输出指令到输出端口,假若AI中控台判断当前数据将达到报警条件,则会发出指令使安装在大型货车内外的预警提示装置同时发出蜂鸣振动和双语音报警来双向提示,同时车内中控台也有相应的预警提醒信息出现在液晶屏幕上。当货车行驶一段距离盲区内危险解除后,中控台的下一个指令传入预警装置和屏幕,将自动关闭预警装置和消除屏幕信息,即停止蜂鸣、语音输出和屏幕提示,大型货车又恢复到安全行驶状态。
4 结束语
本文主要对中型或较大型货车的盲区监测系统进行了主要分析和研究。首先引用现在较为先进成熟的毫米波雷达技术,有效地提升了货车对于外界(特别是货车右转盲区处)对人员的探测能力,极大地改善了货车关于盲区探测的弊端。其次,该系统采用AI中控板、高清液晶屏幕、以及双语音报警等装置,将现存的较为先进设备整合到一起,使整个装置达到更稳定提高规避危险的目的。毫米波雷达实时发出探测信息,AI中控台会接受此信息并进行有效地分析处理,中控台输出端口一键3连传出处理指令,简明扼要地显示在高清液晶屏幕上,同时蜂鸣报警装置和外置双语音报警装置会对货车驾驶员和外围的人员进行实时警示。
仅设置右转肓区监测系统在有限范围内极大地规避了货车事故的发生,优化了成本,更具有应用前景。经过多次分析比照,满足大批量货车安装需求,并应用于大型货车。未来会加强这一系统的改善和升级,降低能耗和成本并提高规避风险能力。
猜你喜欢
趣味(数学)(2022年4期)2022-07-02 03:10:02
现代青年·精英版(2022年3期)2022-04-06 17:56:06
汽车观察(2021年4期)2021-05-10 04:07:16
中国人民公安大学学报(自然科学版)(2020年4期)2021-01-07 01:07:18
铁道通信信号(2018年12期)2019-01-31 05:36:42
设计(2018年11期)2018-11-27 06:22:36
科技视界(2018年36期)2018-03-01 07:11:20
资源再生(2017年4期)2017-06-15 20:28:30
企业科技与发展(2016年1期)2016-05-30 07:16:19
汽车文摘(2015年11期)2015-12-02 03:02:52