
汽车涂装车间LASD喷涂机器人的应用
2023-06-30 05:23:53刘杰张京川徐德庆胡志文
汽车工艺师 2023年3期
刘杰 张京川 徐德庆 胡志文

摘要:为满足汽车产品环保要求,针对汽车减振阻尼垫的环保问题,各大汽车制造企业引入了新型环保材料LASD(水性阻尼涂料)来替代传统的含沥青材料的减振阻尼垫。介绍了涂装车间LASD喷涂机器人系统的设计和安装调试过程,以及常见问题的解决办法。将LASD喷涂机器人系统的组成、各机构功能及安装调试内容、工艺要求充分展示,对汽车行业LASD喷涂机器人设备上马提供一个技术参考,也为汽车企业环保工作的实施提供一个成功案例。
关键字:LASD;阻尼;机器人系统;安装调试
伴随着国家对于汽车材料环保的要求越来越严格,为满足汽车产品环保要求,针对汽车减振阻尼垫的环保提升,各大汽车制造企业引入了新型环保材料LASD(水性阻尼涂料)来替代传统的减振阻尼垫。北京奔驰汽车有限公司投资三千多万元,在2021年完成了喷漆一工厂的LASD机器人喷涂工艺的应用,实现了所有车型全部应用LASD机器人喷涂工艺,LASD由于是以水为分散介质,VOC含量很低,安全环保,应用范围日益广泛。本论文通过详细阐述涂装车间LASD喷涂机器人系统的设计安装,调试应用及出现问题的解决等技术细节,对汽车行业LASD喷涂机器人设备上马提供一个技术参考,也为汽车企业环保工作的实施提供一个成功案例。
LASD喷涂机器人系统的设计
1.LASD喷涂机器人系统的设计背景
北京奔驰汽车有限公司喷漆一工厂建成于2006年,是北京奔驰最老的喷漆车间,生产奔驰E系列和C系列两款车型。密封胶线在改造前自动化程度较低,生产节拍48JPH,仅UBS就有13台ABB机器人,实现车身底涂的自动化涂胶。
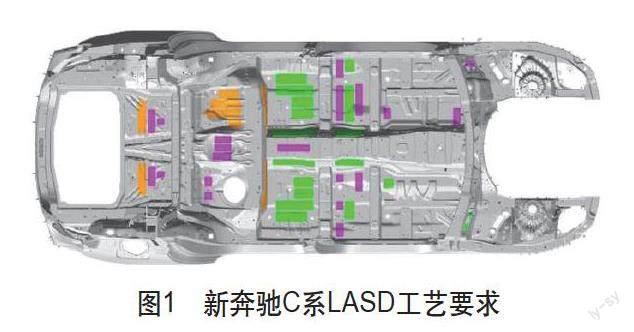
LASD喷涂机器人的工艺要求是在车身内部地板喷涂水性阻尼涂料,使车身地板具有消噪、减振作用。以新C系轿车为例,其工艺要求如图1所示。
图中车身底盘需要阻尼材料喷涂,胶线宽度不同,分别用粉色(宽55mm)、橙色(宽度65mm)和绿色(宽75mm)表示。这个阻尼材料在车身内侧地板,需要机器人从车后盖或车窗伸入机器人手臂,进行喷涂。由于喷涂量较大,节拍要求控制在48JPH,也就是每台车循环时间要控制在75s之内,其中输送时间至少15s,LASD喷涂机器人的识别、工作时间要控制在60s之内,故需要多台机器人,多站喷涂,才能满足生产。
2.LASD喷涂机器人系统的布局设计
此次增加LASD喷涂机器人工艺,为提高自动化率,并且考虑到应用LASD喷涂机器人后,车顶小天窗密封胶无法人工打胶(之前需要一个人拿胶枪进入车内,进行小天窗密封胶打胶,LASD工艺应用后,人无法进入车内踩踏车身地板)。因此,在LASD喷涂机器人区,增加一台车顶小天窗密封胶机器人。涂装设备安装调试由ABB工程有限公司负责,根据工艺要求和对喷涂工作量评估,设计安装并调试LASD&RoofDitch机器人工作站两个站,并为以后车身前盖密封胶涂胶预留ISS、FAD机器人安装区域。涂装车间LASD喷涂机器人工艺布局图如图2所示。
其中共有两个LASD喷涂机器人工作站,黄色机器人为预留的FAD和ISS机器人,不是本次LASD喷涂机器人。本次共增加6台LASD喷涂机器人,两台开盖机器人和一台车顶天窗打胶机器人,共计9台机器人。天窗打胶机器人设置在机器人1站车身正上方,为吊挂型机器人,如图3所示。在LASD喷涂机器人1站,共有5台机器人,布置如图4所示。
1站宽6m,长10m,3台LASD喷涂机器人IRB4400分设在两边轨道,左侧轨道1台,右侧轨道2台;1台开盖机器人IRB4600设置在左后方;小天窗机器人IRB2600设置在车身小天窗正上方。
1站后方为LASD喷涂机器人2站,共有4台机器人,布置图如图5所示。
2站宽6m,长10m,3台LASD喷涂机器人IRB4400分设在两边轨道,左侧轨道2台,右侧轨道1台;1台开盖机器人IRB4600设置在右后方。
3.LASD喷涂机器人系统的组成
北京LASD喷涂机器人系统是由机器人系统、视觉系统、LASD涂胶系统、LASD供胶系统、胶清洗系统及安全系统等各大系统组成,以及与之配套的输送系统、隔离室体、平台等。
(1)机器人系统 机器人系统是机器人工作的主体,其主要包括:机器人本体9台,机器人控制柜9个,机器人导轨4条,机器人示教器9个,机器人安全链1套,以及机器人操作台(含人机操作界面)2个(每个站1个)
LASD喷涂机器人系统,每臺6轴机器人由各自的控制柜控制,开门机器人为固定位置,喷涂机器人设置在导轨上,便于前后移动,因此也称为7轴机器人。每个机器人站有一个操作台,用于操作和监控机器人状态,每个机器人控制柜上连接机器人示教器,在机器人出现故障和机器人调试中,手动操作示教器,来移动机器人。
机器人安全链,系统设有2条双通道的安全链:紧急停止链和运行链。紧急停止链包括主操作面板紧急停止按钮和示教器紧急停止按钮,也可设一个或多个外部紧急停止按钮,所有停止属于0类停止。运行链包括自动模式停止、试验模式停止、一般模式停止和延迟停止。除延迟停止(1类)外,其他停止均属0类。
紧急停止复位在紧急停止后,正常的标准要求必须执行以下两项不同的操作,方可在紧急停止后恢复运行模式:必须手动释放按下的紧急停止开关;必须重新向机器人各轴马达送电(按马达上电按钮)。
(2)视觉系统 视觉系统是机器人工作的眼睛,用来识别并准确定位加工的车身位置,并将信号传输给机器人系统,自动补偿偏差,达到喷涂准确,其主要包括:相机8台,相机照明灯8台,相机保护罩8台,以及视觉系统控制柜(含人机操作界面)2台。
LASD喷涂机器人系统的两个站,每个站分布4台相机,每个相机下方是各自的相机照明灯,被设置在相机保护罩内,各设备由电缆连接汇集到视觉系统控制柜上,通过图像处理计算偏差,再通过机器人PLC计算出机器人的补偿值,机器人从而在喷涂中进行补偿,达到车身喷涂位置的准确。
(3)LASD涂胶系统 LASD涂胶系统指的是机器人的喷涂工具,由定量机、胶管、胶枪等构成。
定量机由电动机、丝杠驱动单元、齿轮箱及材料储存室等构成,其功能是将喷涂材料以定量、定压的方式输出,从而保证喷涂的量精确。定量机简图如图6所示。定量机是涂胶系统的关键硬件,其工作逻辑如图7所示。
从图7中可以看到,当活塞在最下端,进口阀打开时,开始填充进料,活塞随着丝杠的悬转精确上升,填充完成后,进口阀关闭,出口阀打开,定量机定量输出胶,按照参数设定的流量和压力出胶,直到输出完成。为保障输出的连续性,一般都是两个定量缸并联,从而保证输出连续。
胶枪是机器人手臂上的作业工具,其主要构成如图8所示。
胶枪的构成主要由枪头、枪体、锁环、旋转机构、传感器单元、缸塞系统、安装法兰及连接元件等构成,枪头有三个头,每个头的方向角度不同,机器人在工作中,选择最合适的枪头来喷涂,胶枪和机器人本体由法兰连接。
(4)LASD供胶系统 LASD为水性阻尼涂料,也称可喷涂液态阻尼材料或液态可喷涂型阻尼隔声材料,是一种以高分子树脂聚合物为基本成膜物,以水为分散介质,辅以填料和助剂等制备的水性高分子减振降噪阻尼材料。汽车喷涂常用的LASD为水性丙烯酸液态阻尼涂料,其主要成分和各成分功能见表1。
LASD材料选用德国汉高公司TEROSONAL7173,其湿膜密度1.45~1.55g/cm?,干膜密度0.7~0.9g/cm?,发泡率接近80%,轻量化效果显著,使每辆车的阻尼材料控制在2~3kg,大大优于传统的沥青阻尼垫。
该材料塑性黏度2.1MPa?s,由胶泵供给机器人涂胶系统,从圆形不锈钢吨桶中抽取,采用美国固瑞克公司的25A454高黏度胶泵两组,安装在1000L压盘升降架上,每组胶泵由两个泵并联,交替打胶,保证了胶的连续供给,控制系统有控制柜、气动控制面板组成,可实现手动和自动控制,采用自动控制模式下,当一个胶泵的胶桶用完,另一个胶泵会自动工作,使胶可以源源不断的供给。机器人需求供胶压力为5~10MPa,胶泵出口压力控制在20~25MPa,通过500μm的高压过滤器,供给到涂胶机器人区,再经过6个高压调压器,供给每个机器人。胶泵结构如图9所示。
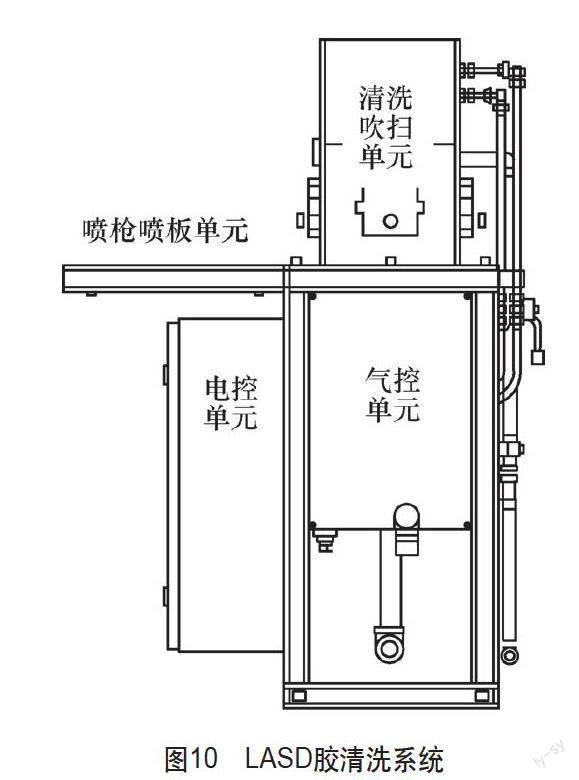
(5)胶清洗系统 胶清洗系统由清洗吹扫单元、气控单元、电控单元及胶枪喷板等组成,是清洁枪头,防止枪堵塞的重要设备,其构成如图10所示。其中,清洗吹扫单元主要包括吹嘴、风刀、毛刷、传感器、加热器及供排水管路及超声波阵子等,如图11所示。该设备具有通过毛刷配合超声波清洗的功能,可有效实现固化残胶的清理,配合加热器对清洗液进行加温,大大提高清洁效率。
(6)安全系统 安全系统包括机器人区域安全网、安全锁、光栅、安全门及急停按钮等,将机器人区域保护成一个封闭区域,避免人员在生产时闯进机器人工作区,做到人员误入后设备急停,从而保证人员安全,在紧急情况下,做到立刻停止设备。
LASD喷涂机器人系统的安装调试
1.LASD喷涂机器人系统的安装
LASD喷涂机器人系统在假期24h不间断集中安装,详细安装内容及进度见表2。LASD喷涂机器人系统设备安装完成后,主要检查内容见表3。
2.LASD喷涂机器人系统的调试
废气LASD喷涂机器人系统的安装完成后,进入调试阶段,首先要调好供胶系统,然后做供胶测试,喷板实验。根据工艺要求,机器人喷涂宽度有55mm、65mm、70mm及75mm等不同要求,机器人枪嘴距离喷涂铁板保持在50mm,通过控制喷涂的压力和流量,使喷板能达到要求,并且稳定喷涂。喷涂厚度工艺要求LASD干膜后,满足3mm,厚度可以由机器人喷涂时速度控制。
在机器人调试前,已用Robot Studio软件完成两个车型的离线编程仿形工作,将LASD工作量分配给6台机器人,然后将仿形好的程序复制到现场,在现场用示教器进行轨迹优化,达到工艺要求,调试机器人时,尽量让枪头喷涂扇面和施工表面垂直,从而实现平滑的喷涂效果。无法保证垂直的情况下,应尽量保持出胶口方向与机器人移动(开枪到关枪)方向成锐角,通俗的说即拉着胶条进行喷涂。在距离钣金较近的位置,可以降低zone值与喷涂速度,使之更加平滑通过狭小区域。
以奔驰新C系车局部为例,驾驶室地板有较多阻尼需求,具体喷涂工艺要求如图12所示。为满足其工艺,机器人从流量、速度上控制,其控制参数见表4。
实际喷涂出的LASD不会是完全理想化的长方体,会和数模中形状略有差别,但只要控制在工艺偏差±5mm,厚度2.4~4mm,均为符合工艺,如图13所示。
LASD喷涂机器人系统的常见问题及解决办法
LASD供胶系统的最大问题是LASD胶容易干结,造成堵塞,胶暴露在空气中,会造成胶中水分流失,形成干结。因此,整个循环系统,都要做好密封防护,如在胶泵压盘边缘涂抹凡士林,隔绝空气,在高压调压阀排胶口末端,定期保养,更换密封,否则容易产生干胶,造成枪头堵塞等问题,干结的LASD胶甚至会堵塞末端胶管路。为避免生产涂胶后未及时进入烤箱烘干膨胀,在长假期间,不能在生产线存留未经烘烤,喷涂过LASD胶的车身。
LASD喷涂机器人系统的常见问题及解决办法如下:
1)厚度不良。胶条宽度不变的情况下,可通过增加或减小涂胶速度来降低或增加膜厚。
2)宽度不良。修改涂胶指令中的流量(bead)参数可调整胶条宽度。bead参数值越大,胶条越宽。最大值建议不超过75mL/s。宽度调整合适后,测量膜厚确认是否需要对膜厚进行調整。
3)干涉。针对干涉位置的胶条,通过手动示教涂胶位置点远离干涉位置;若不方便进行示教,可使用ShopFloor Editor软件对轨迹进行离线修改。
4)分叉。胶条出现分叉的主要原因为枪嘴出现干胶或异物造成堵塞。需使用塞尺对枪嘴进行清理,去除异物保持出胶通畅。
结语
涂装车间LASD喷涂机器人系统的安装调试,在规定时间内完成,这一新工艺的应用,解决了传统沥青阻尼垫的环保弊端,有益于车身轻量化,为北京奔驰汽车有限公司创建绿色工厂提供了有力的支持。
这一项目得到了公司高度重视,前期论证充分,设计合理,准备工作到位,使这一项目能够按计划顺利实施,在短期内完成了LASD喷涂机器人系统的应用。为企业的环保材料的应用做出了贡献。同时也看到,LASD材料在车身减重、环保等方面发挥着积极的意义,为了保护生态环境,节能降耗,实现经济社会的可持续发展,需要在工业生产中的各环节都考虑环保材料的应用。
参考文献
[1] 何彬,肖其弘,李旋,等.新型水性阻尼材料在汽车涂装中的应用[J].涂料工业,2014,44(6):61-64.
[2] 关迎东,孙春龙,李海燕,等.有机高分子阻尼涂料的研究进展[J].涂料工业,2011,41(9):73-75.
[3] 廖梅东, 林小慰, 何凯欣, 等. 喷涂水性丙烯酸液态阻尼材料的研究与应用[J]. 现代涂装, 2017(11): 70-72.
[4] 黄磊,徐波,黄安民,等.汽车用热熔阻尼材料阻尼性能的研究[J].汽车工艺与材料,2011(12):42-42.
[5] 苏坤, 李永岗, 吴祥东, 等. 新型可喷涂液态阻尼材料的制备及其性能研究[J]. 现代涂料与涂装, 2018, 21 (6): 12-14.
猜你喜欢
世界汽车(2022年11期)2023-01-17 09:30:50
装备制造技术(2021年9期)2021-12-17 14:03:28
装备制造技术(2021年2期)2021-07-21 05:38:22
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
粘接(2021年1期)2021-06-10 01:06:39
数学物理学报(2021年2期)2021-06-09 08:54:38
航空制造技术(2020年14期)2020-09-06 07:36:40
数学物理学报(2016年6期)2016-04-16 04:41:06
汽车维修与保养(2015年7期)2015-04-17 02:12:44
