爬壁机器人发展现状与关键技术研究综述
2023-06-28 08:57姜泽王珉赵哲李艺超许允斗
包装工程 2023年12期
姜泽,王珉,赵哲,李艺超,许允斗,c
爬壁机器人发展现状与关键技术研究综述
姜泽a,王珉b,赵哲a,李艺超a,许允斗a,c
(燕山大学 a.河北省并联机器人与机电系统实验室 b.燕山大学图书馆 c.先进锻压成形技术与科学教育部重点实验室,河北 秦皇岛 066004)
随着爬壁机器人技术的发展,为解决其产品应用化问题,对爬壁机器人的研究进展进行梳理、分析和归纳,讨论未来的发展方向,为设计应用于高危环境和特殊场景的爬壁机器人提供思路和参考。将爬壁机器人按移动方式分为履带式、轮式、足式及混合式,通过文献研究法对不同移动方式的爬壁机器人进行综述;将真空吸附、磁吸附、推力吸附等不同吸附方式的爬壁机器人进行对比,介绍了爬壁机器人自适应技术的研究现状及存在问题;总结并分析了爬壁机器人在工业、军事等领域的发展趋势。总结了不同移动方式的爬壁机器人的国内外研究现状,分析了爬壁机器人不同吸附方式的优缺点,归纳预测了爬壁机器人的发展方向。
爬壁机器人;移动方式;吸附方式;自适应性
随着机构学、人工智能等技术的快速发展及人们对高危环境中工作安全意识的提高,利用机器人代替人力完成高危工作已经成为一种普遍趋势[1-4]。爬壁机器人是工业移动式机器人及特种机器人研究的分支,其因具备有效的壁面吸附与移动特性,可通过搭载侦查、检测、维修等设备,完成高空立面作业任务,在军事、船舶、风电等领域有着广阔的应用前景[5-8]。
在2015年《中国制造2025》计划颁布后,我国工业机器人进入迅速发展时期,许多研究部门重点投入了爬壁机器人领域的研究,在基础理论知识、结构的优化设计、机构协调控制系统等方面进行了有益探索,深度融合传感器等技术,实现爬壁机器人智能化,代替人工高效率作业。
本文结合近年来爬壁机器人领域的研究成果,总结分析不同类型机器人的研究现状,探讨其关键技术及发展方向,为未来爬壁机器人的工程化设计提供有效的借鉴与参考。
1 爬壁机器人国内外研究现状
爬壁机器人主要由吸附装置、移动机构和驱动装置三部分组成,按移动方式的不同可分为履带式、轮式、足式及混合式爬壁机器人。
1.1 国外研究现状
1.1.1 履带式爬壁机器人
卡内基梅隆大学的Menon等[9]研制了履带式机器人Tankbot,如图1a所示,该机器人履带由黏性材料制成,黏附面积较大,因此负载能力较大,但转弯不稳定。卡内基梅隆大学的Unver等[10]研发的爬壁机器人在机器人底部铺设了大量多孔薄膜,如图1b所示,将薄膜内部采用抽真空的方式造成真空负压以吸附在壁面上,该机器人的质量较小,但其工作环境较为苛刻,必须为光滑壁面。美国斯坦福大学设计了一款多体永磁履带爬壁机器人,如图1c所示,它依靠柔性关节能够实现两个垂直壁面拐角处的过渡[11]。2018年法国南特中央科学实验室的Olivier[12]针对船体焊接任务,研制了履带式永磁爬壁机器人,如图1d所示,该机器人能够携带包括自身质量在内的100 kg的有效载荷,可以完成焊接、船体表面信息扫描等工作。Fukui等[13]设计了一款可在屋顶快速移动的爬壁机器人HanGrawler,如图1e所示,该机器人借助履带上的特殊装置可承载60 kg在壁面上以0.1m/s的速度直线行驶,以8.5°/s的旋转速度转弯。
1.1.2 轮式爬壁机器人
瑞士苏黎世联邦理工大学的Fischer等[14]针对船舶检测提出了“母子”爬壁机器人,如图2a所示。“母”机器人在厚金属板处移动,其质量不影响环境结构的稳定性,故“母”机器人可建造得足够大,以轻松越过障碍。“子”机器人只能水平移动,工作时“母”机器人背着“子”机器人跨越焊缝等障碍物,当运动到焊接处时,“子”机器人便可以水平移动进行探测。澳大利亚的La等[15]研发了对钢结构和桥梁进行视觉和3D结构检查的四轮磁吸附爬壁机器人,如图2b所示,该机器人可以在导磁表面自由移动,通过携带传感器进行数据收集,并实时发送到地面站进行监控和进一步处理。英国伦敦南岸大学的Gabriela等[16]设计了一种永磁吸附爬壁机器人SIRCAUR,如图2c所示,该机器人通过轮驱动来探测混凝土结构中钢筋和空隙的存在、位置和深度。机器人由轻型材料铝合金、碳纤维搭建而成,故其质量较小,但能够搭载7.6 kg的重物。葡萄牙加州大学国际研究中心使用一种弹性体和ABS塑料组成了柔性被动底盘,如图2d所示,机器人能够在不需要驱动的情况下适应曲面,同时车轮使用全向轮,以最小自由度提供360°全向运动,运动更加灵活[17-18]。俄罗斯莫斯科理工大学的Nunuparov等[19]研制了一款借助离心泵以空气动力吸附在壁面上的轮式爬壁机器人,如图2e所示,该机器人可以自适应任意定向壁面。
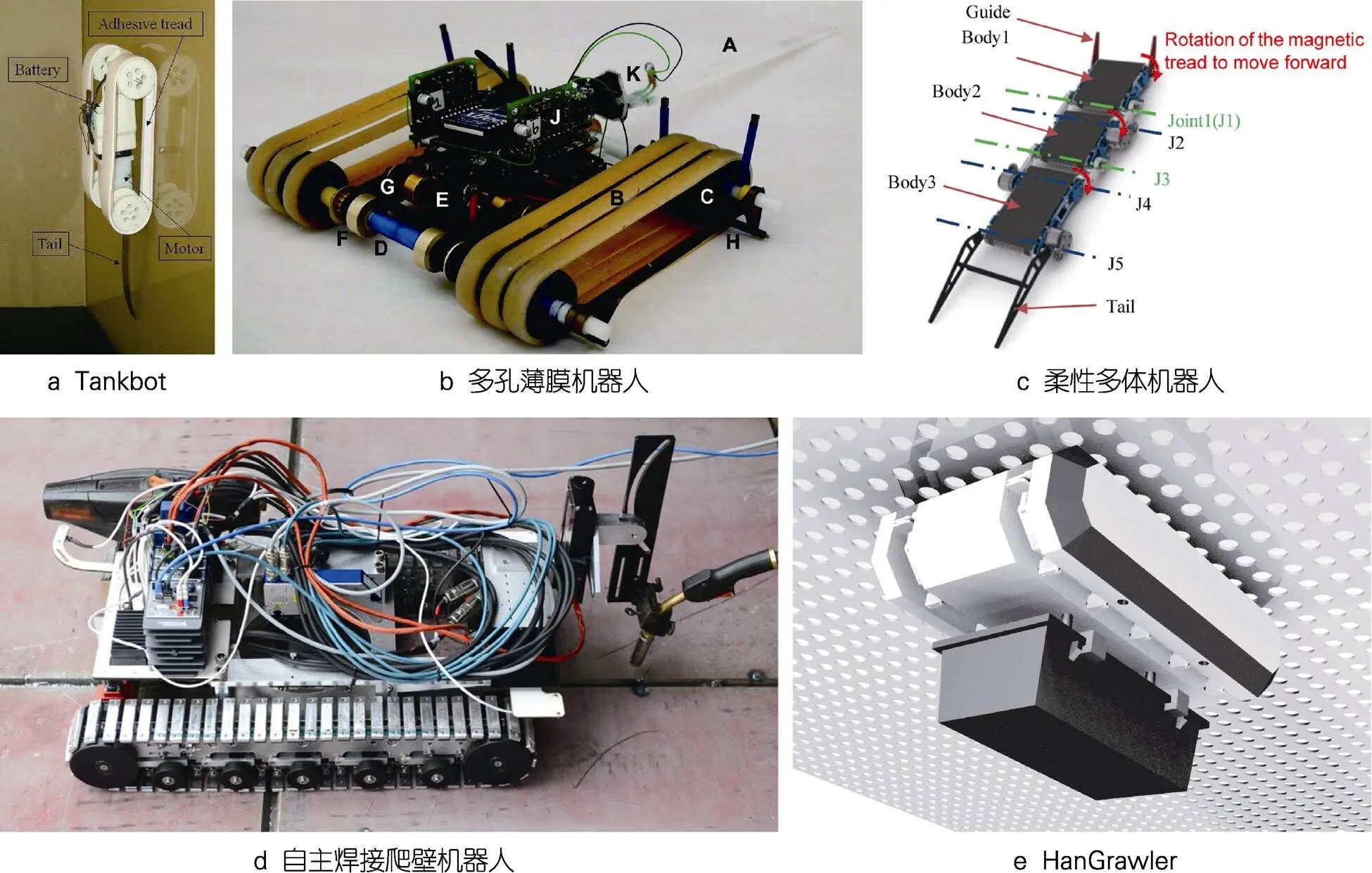
图1 国外履带式爬壁机器人
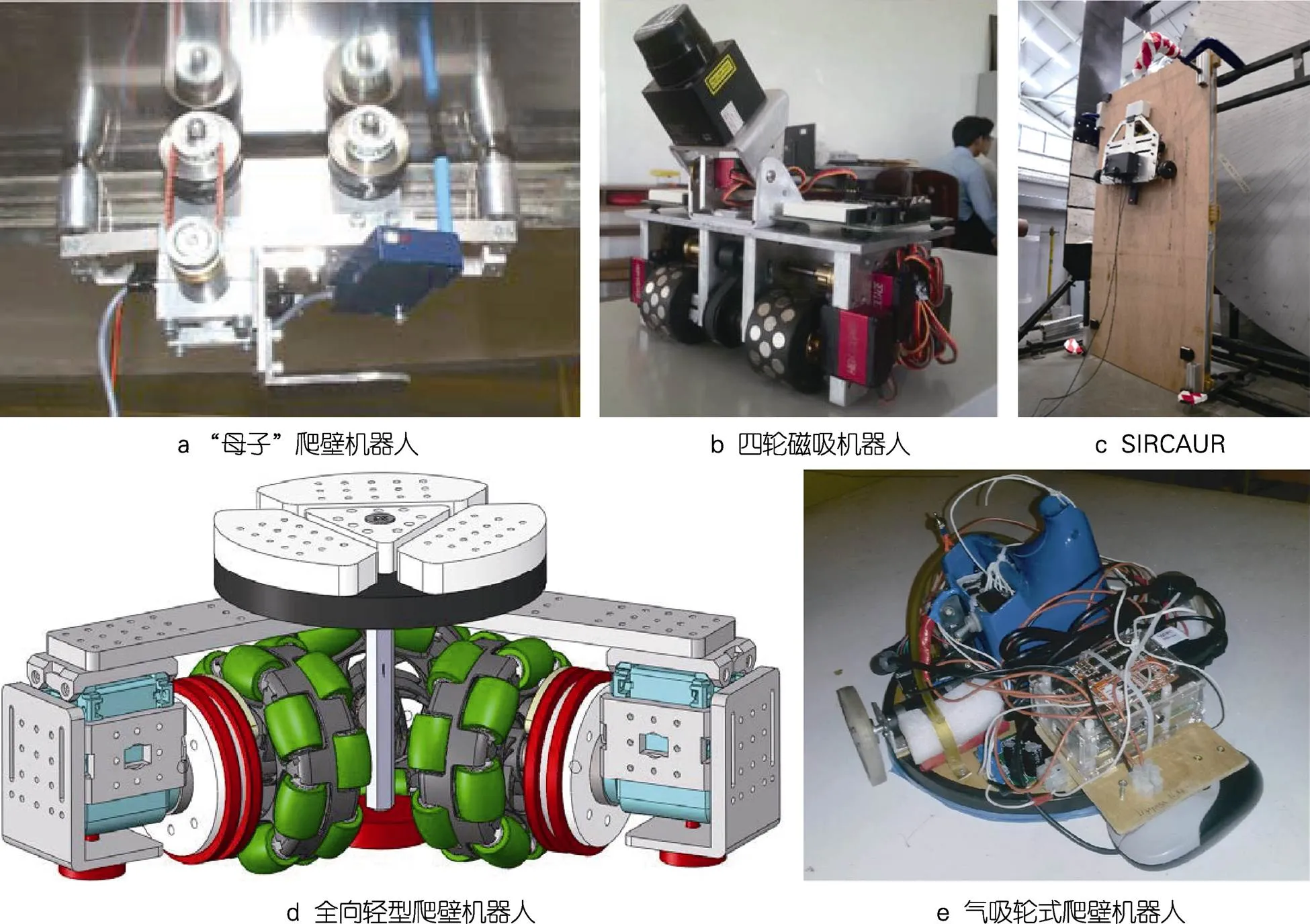
图2 国外轮式爬壁机器人
1.1.3 足式爬壁机器人
美国密歇根州立大学在2000—2004年研制了两种双足真空吸附的小型爬壁机器人[20]。图3a所示的机器人由5个运动关节组成,即1个移动关节和4个转动关节。图3b所示的机器人只有4个转动关节,两个机器人均为欠驱动系统,降低了自身的质量并节约了能耗。韩国成均馆大学的Kim等[21]研发了一种四足式爬壁机器人,如图3c所示,该机器人由两组相互对称的腿和一个躯干组成,每条腿均由三个主动关节和一个被动关节组成,使机器人能够很好地过渡两个平面的凹处和凸处。日本的Inoue等[22]通过模拟人体攀岩壁面技术成功研发了六足爬壁机器人Asterisk Robot,如图3d所示,它依靠前臂分支的摆动和后足分支的伸缩实现吊挂功能,六条分支的协调动作能实现多维度爬行。以色列本古里安大学研究团队设计了一款四足机器人CLIBO[23],如图3e所示,该机器人每条腿分支由2个4自由度的连杆组成,足端有鱼钩状的钩刺,每个钩刺互不影响,使其能在凹凸不平的粗糙壁面爬行。日本千叶工业大学同样运用钩爪吸附原理提出了一款六足爬壁机器人[24],如图3f所示,该机器人每条腿分支的足端有两组微型钩爪,使其可以吸附在混凝土墙面缓慢爬行。韩国蔚山国家科学技术研究所(UNIST)开发的四足机器人UNIclimb[25],如图3g所示,该机器人躯体与腿、腿与足端之间均安装有伺服电机,机器人通过三角步态在工作表面上实现稳定黏附运动,但其负载能力较弱且对吸附壁面要求较高。韩国汉阳大学与江南大学联合研究了一种连杆式爬壁机器人[26],如图3h所示,该机器人通过四杆机构连接内、外框架实现直线越障运动,借助两个锥齿轮实现转向。
1.1.4 混合式爬壁机器人
瑞士联邦理工学院研究团队研制了爬壁机器人TRIPILLAR[27],如图4a所示,该机器人采用钝角三角形结构和磁吸附履带结构相结合的行走机构,能够攀爬铁磁表面,且其具有两个自由度,能够实现平面到平面的过渡。内基梅隆大学的Murphy等[28]通过轮式和足式混合式结构研制了一款类壁虎刚毛群吸附技术的爬壁机器人WaalBot,如图4b所示。地中海岛国塞浦路斯的COMBIJET公司[29]研制了一款轮履结合式船舶清洗机器人RJE-1000,如图4c所示,机器人将永磁吸附装置安放在驱动轮的中间位置,利用带传动运动,解决了永磁铁吸附铁屑残渣的问题,但这样使吸附装置的可靠性有所降低。为保证工作人员的安全,避免遭受核辐射,韩国Kim等[30]提出了一种自主运动的轮履混合式爬壁机器人,如图4d所示,该机器人采用了主动密封和真空抽吸技术,可以在干燥容器储存系统等场所中进行无损检测和辐射测量。
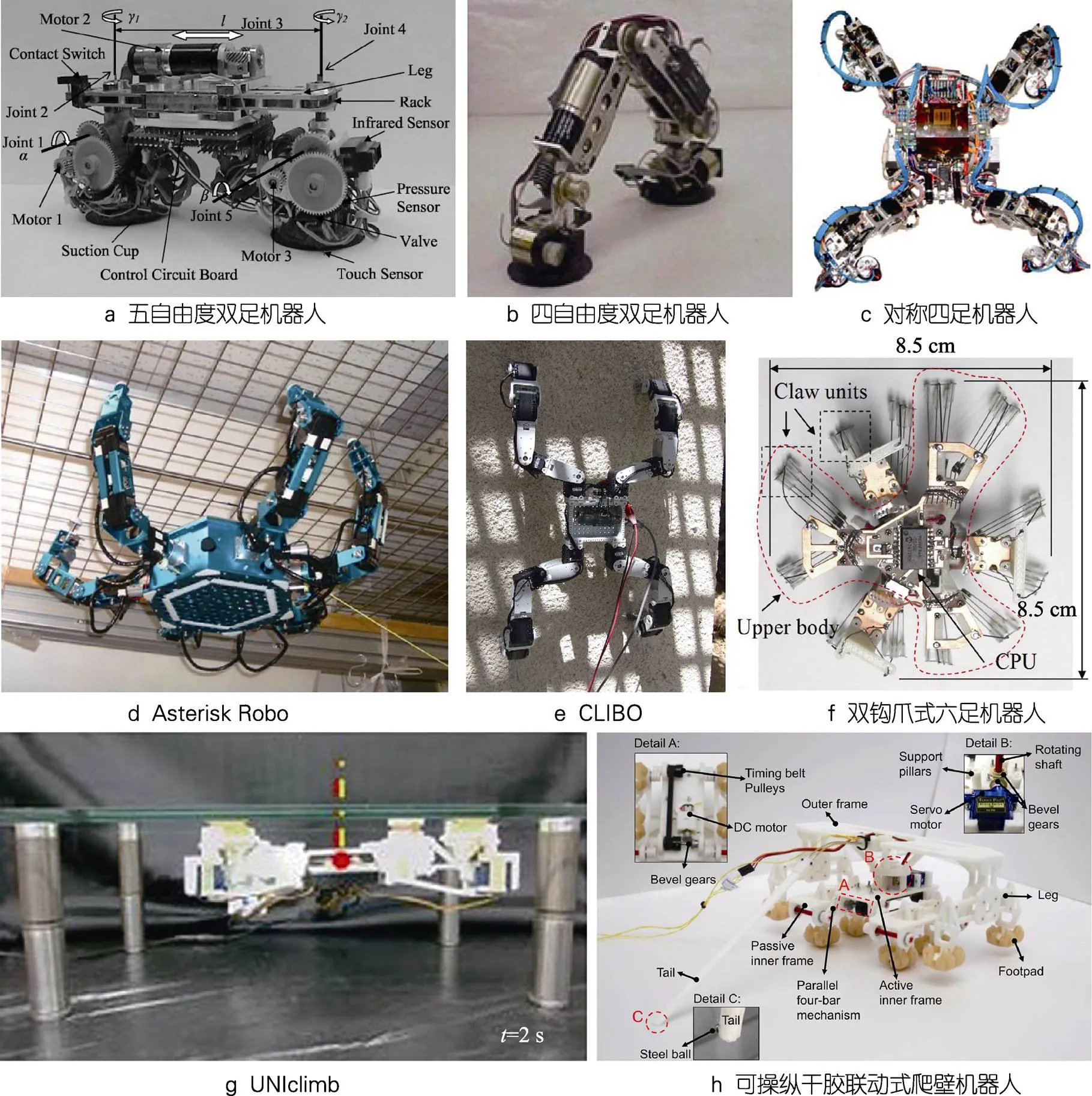
图3 国外足式爬壁机器人
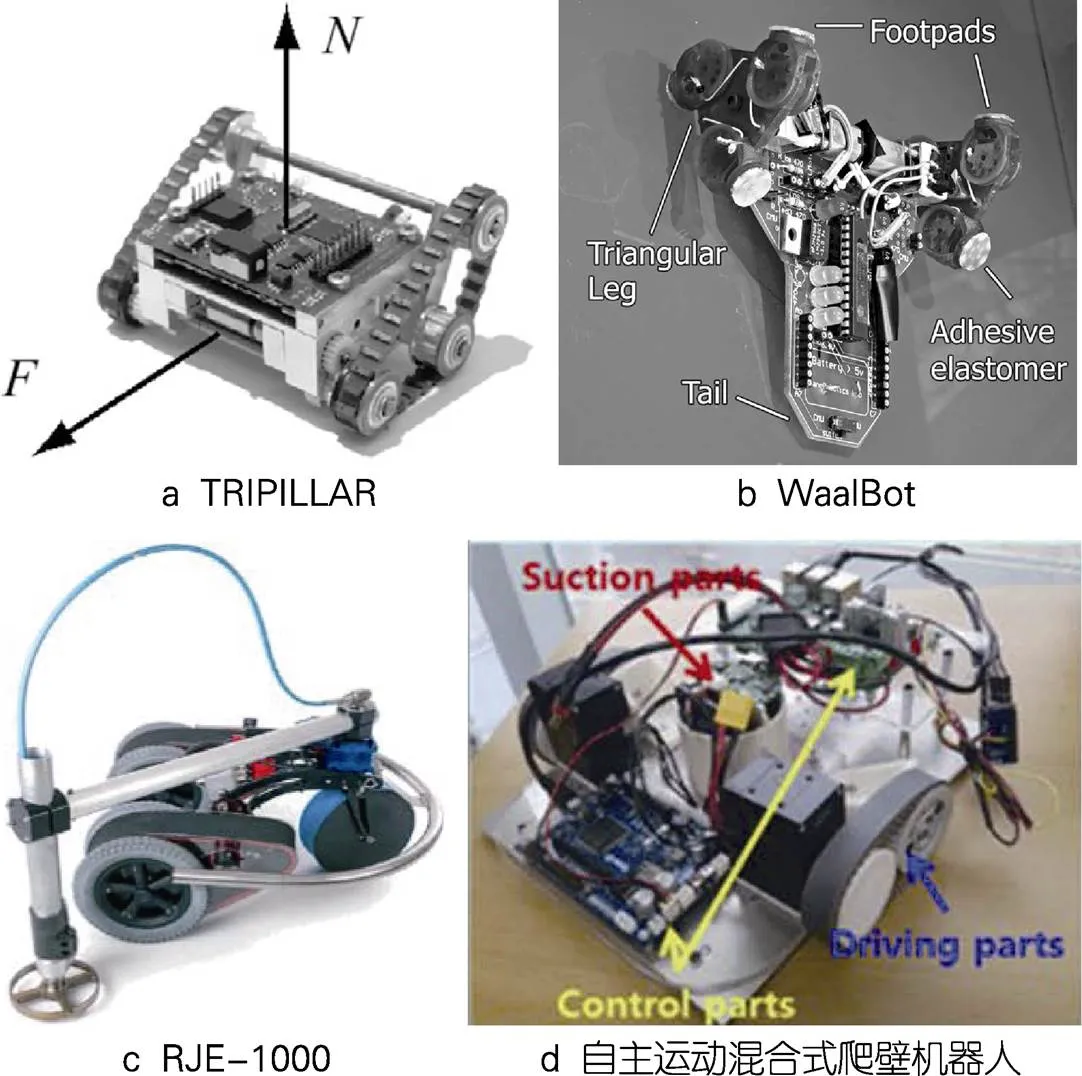
图4 国外混合式爬壁机器人
1.2 国内研究现状
1.2.1 履带式爬壁机器人
湖南大学和河北工业大学合作研发了一款改进的磁履带爬壁机器人,该机器人可携带75 kg的有效载荷在曲率半径为3 000 mm的圆柱形壁上移动[31]。此外,Wang等[32]研制了一种用于可变曲率立面的履带式爬壁机器人,该机器人由两个牵引模块和一个连杆模块组成,牵引模块可以调整机器人姿态以适应曲率变化。中国石油大学为解决高层设施的故障检测问题,提出了一种新型爬壁检测机器人[33],该机器人通过防倾覆机构增大了其抗倾覆能力,可携带10 kg的有效载荷越过10 mm的障碍。刘志辉等[34]为检测三峡大坝流道的缺陷,设计了一种新型的滚动密封式爬壁机器人,该机器人具有耐磨性好、负载大、壁面适应性强的特点。国内履带式爬壁机器人,见图5。
1.2.2 轮式爬壁机器人
上海交通大学为解决石化行业储罐的维护和水电行业大型压力管道的检修问题,基于Halbach阵列设计了一种双层磁路的爬壁机器人[35],如图6a所示,该机器人提高了磁能利用率和吸附的安全性。Zhang等[36]同样针对石化储罐维护问题提出了一种能适应不同曲率的新型爬壁机器人,如图6b所示,该机器人可以在立面上安全稳定地移动,并完成自动精确检测。Jiang等[37]基于四连杆机构设计了一款能被动自适应不同曲率的爬壁机器人,如图6c所示,该机器人可携带5.5 kg的有效载荷,顺利通过8 mm的焊缝。浙江大学针对远洋渔船外板除锈研发了一款轮式爬壁机器人[38],如图6d所示,该机器人使用永磁铁吸附在船舶表面,通过充气轮翻越焊缝实现除锈功能。
1.2.3 足式爬壁机器人
合肥智能机械研究所受到天牛爪子和壁虎的启发[39-40],提出了一种用于粗糙或光滑表面的四足爬壁机器人,如图7a所示,该机器人可通过弯曲自身的躯体适应不同直径的圆柱形壁面。此外,该团队基于五连杆和齿轮传动装置,研发了一款新型的爬壁机器人,如图7b所示。广东工业大学研发团队设计了一款双足式爬壁机器人W-Climbot[41],如图7c所示,该机器人适用于框架立面结构,其具有良好的跨壁面和障碍物的能力。燕山大学的鞠忠金[42]设计了一种4SRRR足式爬壁机器人,如图7d所示,有4个支腿,每条支腿具备6个自由度,同时每条支腿安装有3块电磁铁,增大了与壁面的吸附面积,可在不同工作环境中稳定行走。
1.2.4 混合式爬壁机器人
中国科学技术大学团队结合棘轮与履带研发了一款新型爬壁机器人,如图8a所示,该机器人能在0~360°的工作表面爬行[43]。兰州理工大学的黄华等[44]设计了一种基于行星履带轮混合双吸附的爬壁机器人,如图8b所示,该爬壁机器人能够在壁面上灵活移动、稳定越障。郑勇峰等[45]为解决爬壁机器人在大型变曲率金属立面上的自适应问题并提高越障能力,提出了一种分体柔性轮足复合式爬壁机器人,如图8c所示,该机器人通过调整运动姿态实现在变曲率立面上的稳定运动,具有良好的变曲率自适应能力。
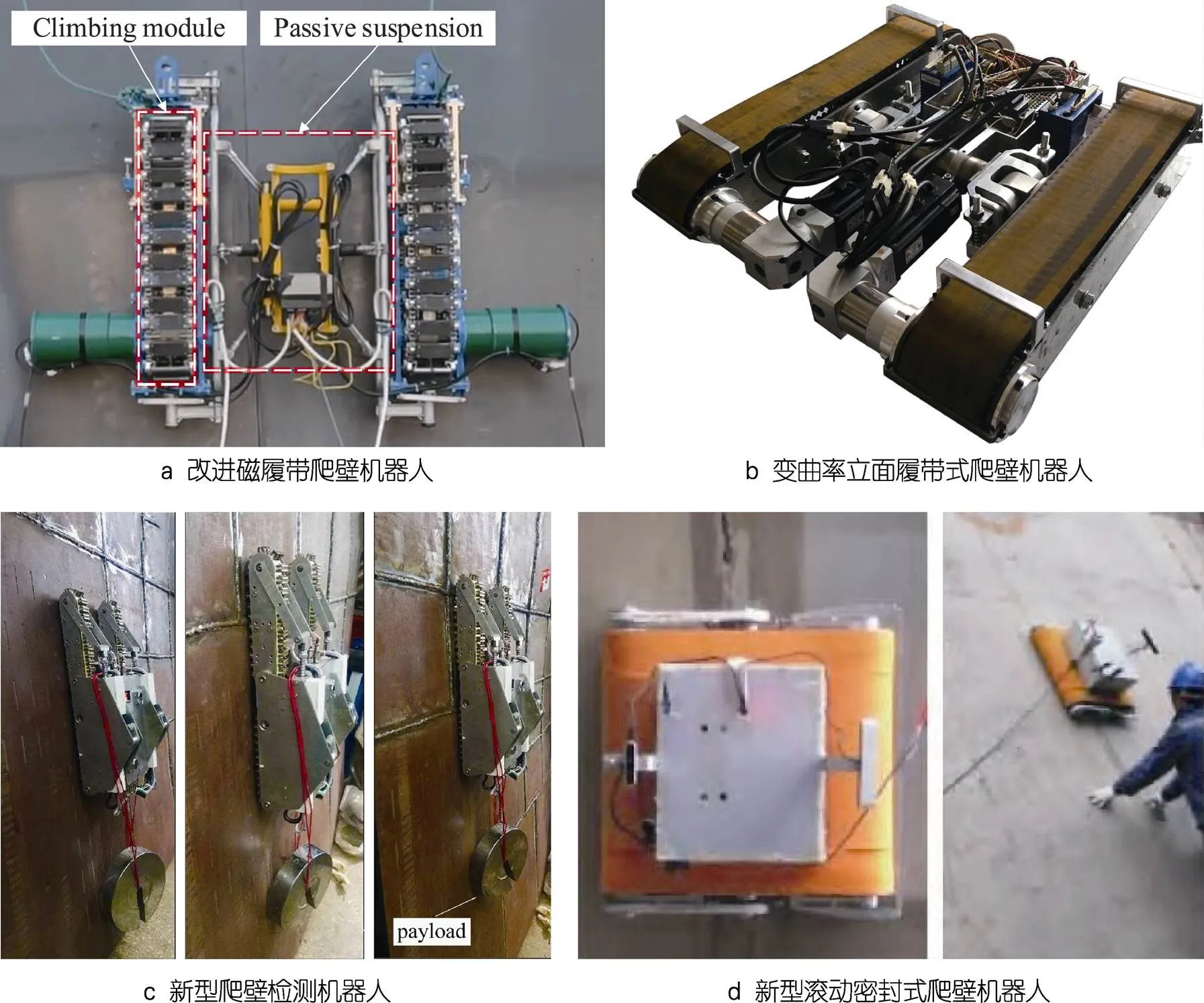
图5 国内履带式爬壁机器人
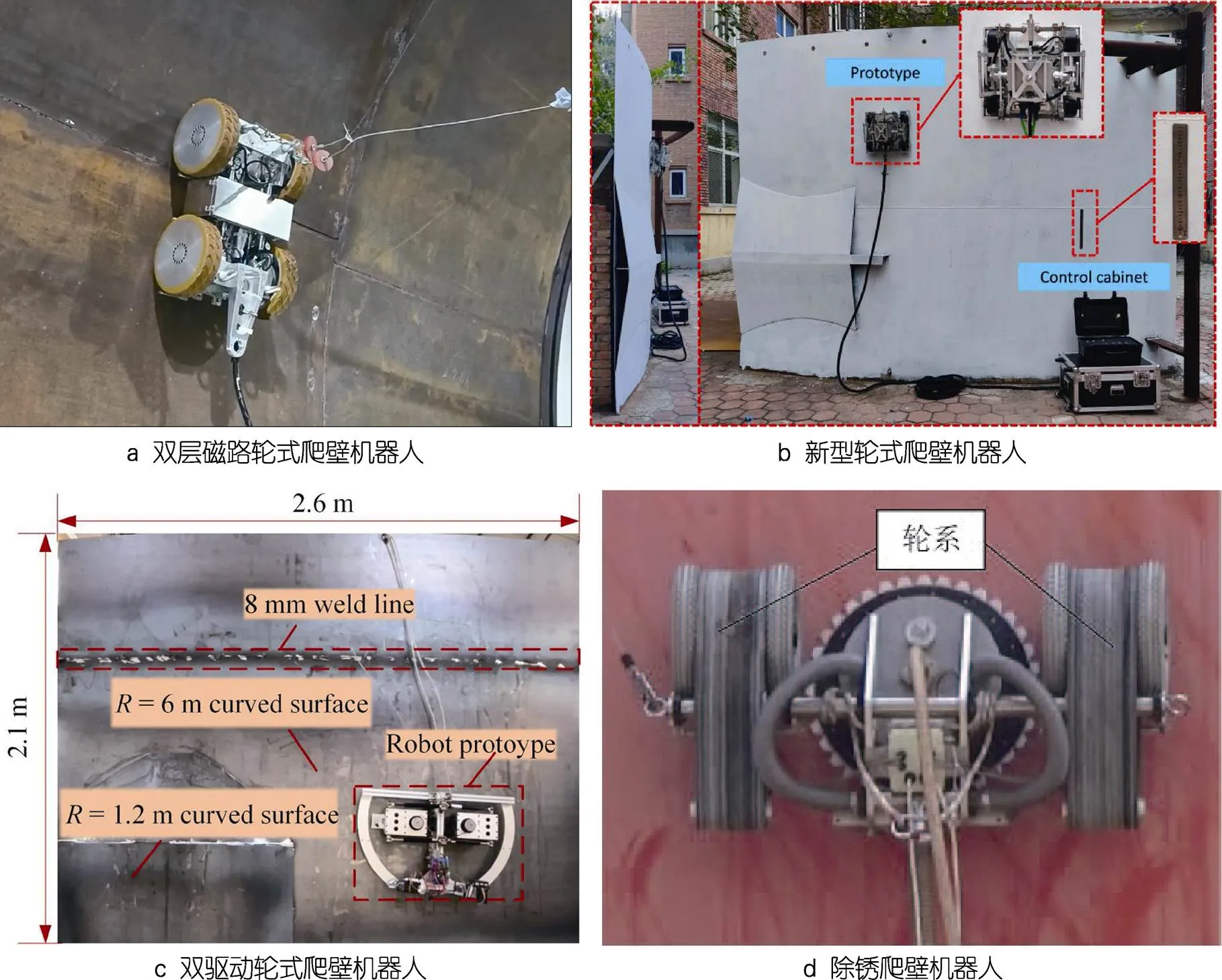
图6 国内轮式爬壁机器人
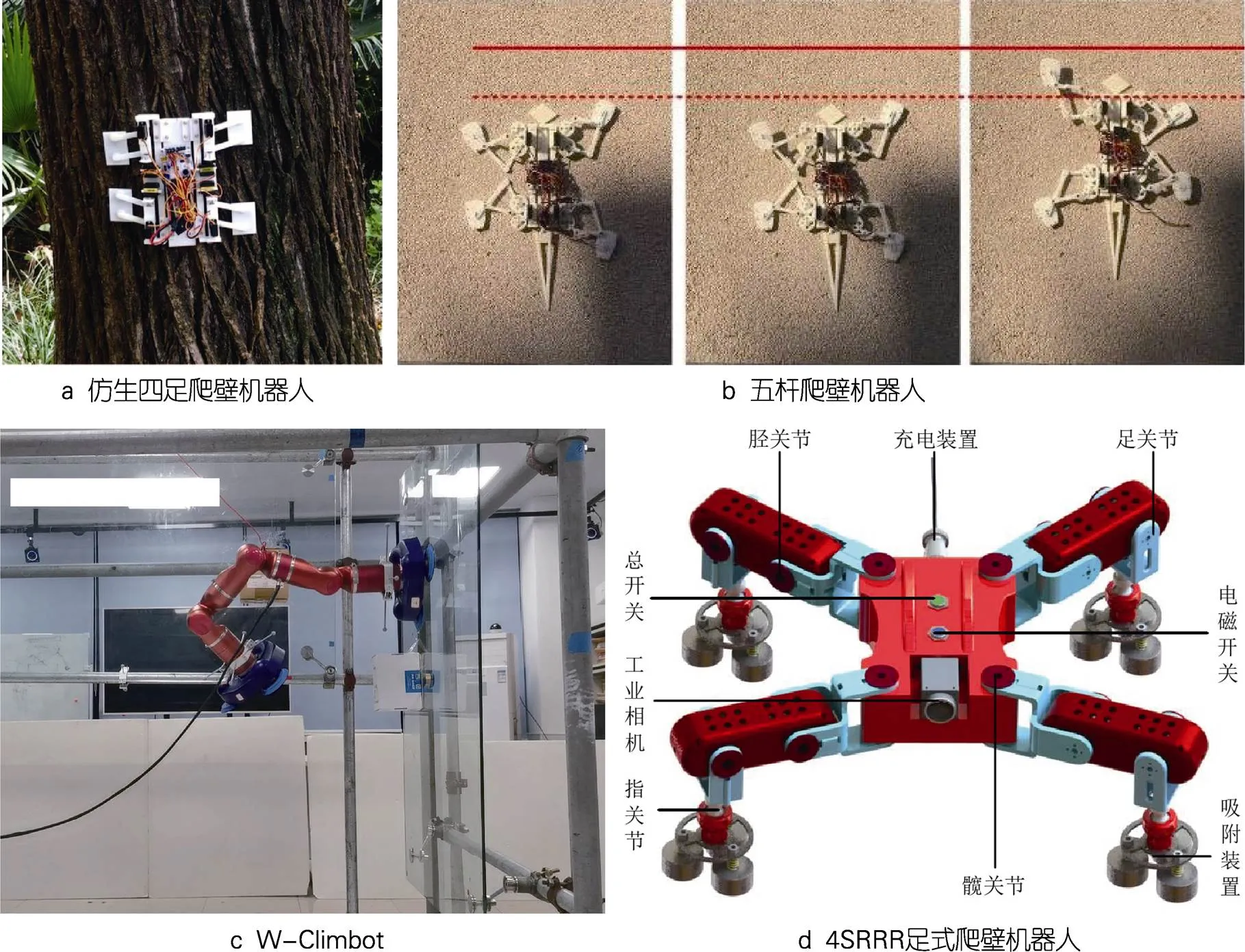
图7 国内足式爬壁机器人
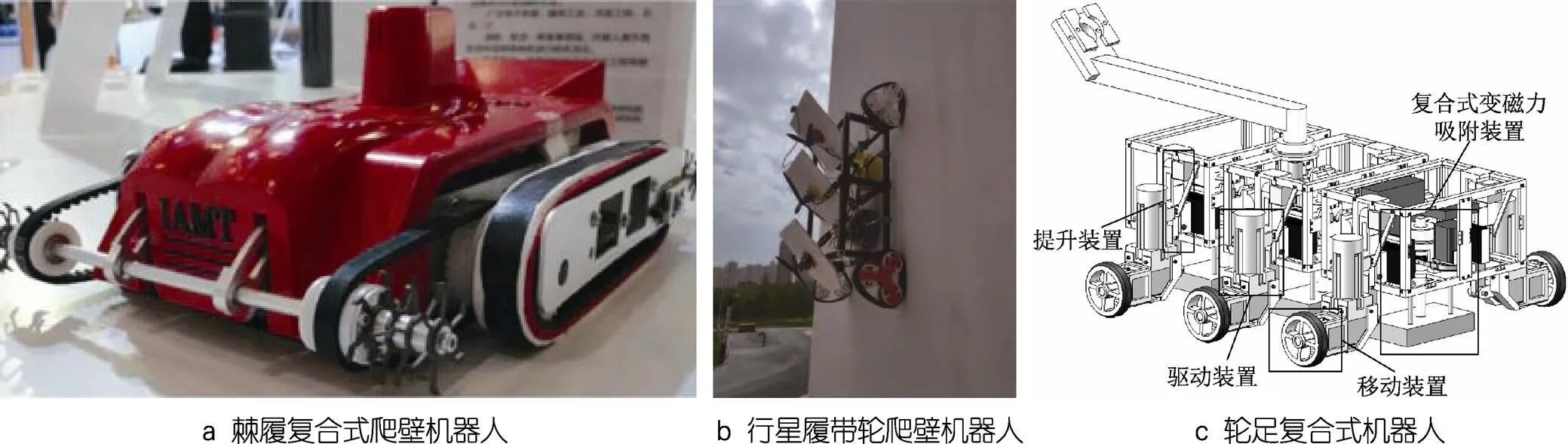
图8 国内混合式爬壁机器人
2 爬壁机器人关键技术分析
2.1 吸附技术
爬壁机器人能在立面上依靠吸附机构产生的作用力克服机器人所受重力,使其不产生下滑。目前,吸附方式主要有真空负压吸附、磁吸附(永磁吸附和电磁吸附)、推力吸附等方式。
真空吸附式爬壁机器人[46-47]主要用于较为平整光滑的壁面,如高楼大厦的玻璃表面、外墙壁面,否则吸附接触面时容易产生气体泄漏,导致机器人发生坠落危险。推力吸附爬壁机器人主要依靠机器人背部的螺旋桨高速旋转产生反作用力使其吸附在壁面[48-50],近年来研究人员通过同轴双桨、多轴旋翼使机器人产生更大的吸附力甚至在地空多维度空间运动[51-52]。磁吸附爬壁机器人[36-37]多用于大型船舶、储油罐等导磁材料壁面的除锈清洁、焊缝检测任务,具有高负载和高移速的特点,但由于磁铁自身材料特性,此类爬壁机器人只能用于导磁材料壁面,适应性较差。仿生爬壁机器人的吸附方式主要分为两种,一是运用壁虎刚毛阵列原理制备黏附材料[53-54],吸附在工作壁面;二是通过爪刺产生的机械力抓持吸附[39,55],但驱动控制较为复杂。表1为常见的几种吸附方式的优缺点对比,由表1可知,这些吸附方式均有各自的局限性,爬壁机器人常常是针对某一特殊环境、某种特定任务而研制的,较难通用化。
2.2 自适应技术
爬壁机器人多采用一体式刚性机械结构,而实际工况中的大型立面更为复杂,曲率多变、障碍凸起等问题制约着爬壁机器人的推广应用,对机器人的自适应性提出了更高的要求。
爬壁机器人自适应技术主要分为主动自适应和被动自适应。主动自适应多应用于多足式爬壁机器人[21,42],多足式爬壁机器人通过增加分支腿的主动驱动数量来增大自由度,以提升工作壁面适应性,但这种主动自适应在提高自适应能力的同时,增加了爬壁机器人自身的质量和控制难度。此外,部分研究人员通过多体式设计方法提升机器人的适应性[56-57],即将两个刚性机器人通过转动副连接,使其与壁面形成空间约束关系,实现整体姿态调整,但该方法使机器人的结构体增多,机体变长,造成转弯半径增大,使机器人避障的灵活性降低,增大了运动规划的难度。
被动自适应主要为两种,一种是如文献[37]提到的爬壁机器人,通过结构设计增加一定的变曲率立面的自适应性;另一种是将机器人的部分刚性结构替换为柔性材料[15],柔性材料通过形变提升对变曲率立面的自适应性,虽然此种爬壁机器人的姿态更加灵活,但柔性材料形变不易控制,且负载能力低,无法满足机器人的运动稳定性和作业需求。
表1 吸附方式对比
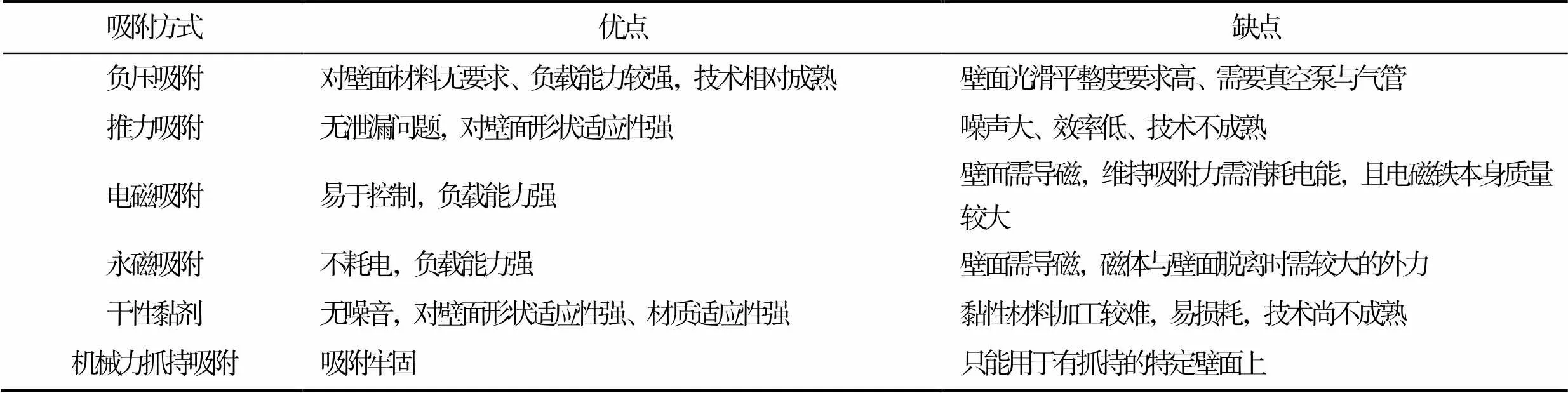
Tab.1 Comparison of adsorption methods
3 爬壁机器人发展趋势
结合上述研究现状和吸附技术分析可知,爬壁机器人经过几十年的大力发展,虽然取得了一些科研成果,但大部分高校、机构的研究尚处于实验室阶段,并未应用到实际工程中,距离产业化还有很大的距离[58-60]。未来的爬壁机器人应着重朝实用化、工业化方向发展。
3.1 智能化
智能化是爬壁机器人研究的最终发展目标。目前,爬壁机器人仍需要人工远程操控协助完成避障、路线规划等功能。将机器视觉技术与人工智能技术应用于爬壁机器人是未来发展的目标,使爬壁机器人能够根据不同的工作环境完成自主避障、自主路径规划等,且根据不同的任务需求自行采用不同的执行机构或工具完成作业任务。
3.2 轻量化
轻量化是爬壁机器人的发展趋势。目前工业爬壁机器人的体积和质量均较大,不易搬运,并且在军事等特殊领域需要更小、更轻、更隐蔽的机器人完成侦查等任务。因此,在能满足功能的前提下,爬壁机器人需向轻量化、小型化发展,各种微型驱动元件、控制元件及新型材料为其奠定了基础。
3.3 无缆化
爬壁机器人长时间作业需要通过电缆、管道为其吸附、运动、作业提供能源,但带缆作业不仅增加了机器人的负重,还极大地限制了爬壁机器人的作业范围与空间,无缆化成为爬壁机器人亟须解决的问题。
3.4 通用化(高适应性)
目前爬壁机器人多为某单一特殊环境而研发,如大型船舶、立式储油罐、高楼外墙壁面等。由于吸附技术限制和行走机构适应性差等问题,机器人只能在某个或某几个类似工况中完成作业。对于爬壁机器人,未来应不断创新吸附技术,并在行走机构创新上发力,打破壁垒,使爬壁机器人的制作成本更低、应用更加广泛。
3.5 仿生化
自然界的攀爬生物经过千百万年的进化,其肢体可以完美地适应多种野外复杂环境,因此,可以借鉴壁虎、蜥蜴、天牛等肢体结构特点,对爬壁机器人机体进一步优化,使其更好地适应复杂的立面环境。
4 结语
经过多年的发展,爬壁机器人领域取得了相当丰硕的研究成果,但只有极少的爬壁机器人在某些领域得到了实际应用,随着新技术的发展和需求的增加,对爬壁机器人的设计也提出了更新、更高的要求。本文从爬壁机器人的移动方式角度出发,进行了分类与综述,并对几种常见的爬壁机器人吸附方式的优缺点进行了分析对比。最后提出,爬壁机器人的研究将朝着智能化、轻量化、无缆化及通用化方向发展,未来将在船舶、风电、石油化工、侦查救灾等领域大展身手。
[1] 赵军友, 张亚宁, 毕晓东, 等. 喷砂除锈爬壁机器人磁吸附结构优化设计及整机性能试验[J]. 中国石油大学学报(自然科学版), 2020, 44(4): 94-99. ZHAO Jun-you, ZHANG Ya-ning, BI Xiao-dong, et al. Optimal Design of Magnetic Adsorption Structure and Performance Test of Wall-Climbing Robot with Sand Blasting and Rust Removal[J]. Journal of China University of Petroleum (Edition of Natural Science), 2020, 44(4): 94-99.
[2] 贾宏丽, 辛洪兵, 周顺豪. 轮足式包装搬运机器人减振装置设计[J]. 包装工程, 2022, 43(15): 315-321. JIA Hong-li, XIN Hong-bing, ZHOU Shun-hao. Design of Damping Device for Wheel-Footed Packaging Handling Robot[J]. Packaging Engineering, 2022, 43(15): 315-321.
[3] 董海涛, 武文革. 新型四轴码垛机器人机构设计与动力学仿真分析[J]. 包装工程, 2020, 41(3): 176-181. DONG Hai-tao, WU Wen-ge. Mechanism Design and Dynamics Simulation of a New Four-Axis Palletizing Robot[J]. Packaging Engineering, 2020, 41(3): 176-181.
[4] 邱仕诚, 伍剑波, 赵恒忠, 等. 一种基于磁力吸附的储罐爬壁机器人本体设计[J]. 中国机械工程, 2022, 33(3): 270-278. QIU Shi-cheng, WU Jian-bo, ZHAO Heng-zhong, et al. Body Design of a Storage Tank Wall-Climbing Robot Based on Magnetic Adsorption[J]. China Mechanical Engineering, 2022, 33(3): 270-278.
[5] YANAGIDA T, ELARA MOHAN R, PATHMAKUMAR T, et al. Design and Implementation of a Shape Shifting Rolling–Crawling–Wall-Climbing Robot[J]. Applied Sciences, 2017, 7(4): 342.
[6] FUJITA M, IKEDA S, FUJIMOTO T, et al. Development of Universal Vacuum Gripper for Wall-Climbing Robot[J]. Advanced Robotics, 2018, 32(6): 283-296.
[7] A 6-DOF Humanoid Wall-Climbing Robot with Flexible Adsorption Feet Based on Negative Pressure Suction[J]. Mechatronics, 2022, 87: 102889.
[8] 马进, 胡洁, 朱国牛, 等. 基于设计形态学的军事仿生机器人研究现状与进展[J]. 包装工程, 2022, 43(4): 1-11. MA Jin, HU Jie, ZHU Guo-niu, et al. Research Status and Progress of Military Bionic Robot Based on Design Morphology[J]. Packaging Engineering, 2022, 43(4): 1-11.
[9] MENON C, MURPHY M, SITTI M. Gecko Inspired Surface Climbing Robots[C]//2004 IEEE International Conference on Robotics and Biomimetics. Shenyang, China. IEEE, 2005: 431-436.
[10] UNVER O, SITTI M. Tankbot: A Palm-Size, Tank-Like Climbing Robot Using Soft Elastomer Adhesive Treads[J]. International Journal of Robotics Research, 2010, 29(14): 1761-1777.
[11] NAM S, OH J, LEE G, et al. Dynamic Analysis during Internal Transition of a Compliant Multi-Body Climbing Robot with Magnetic Adhesion[J]. Journal of Mechanical Science and Technology, 2014, 28(12): 5175-5187.
[12] OLIVIER. A Magnetic Climbing Robot to Perform Autonomous Welding in the Shipbuilding Industry[J]. Robotics and Computer-Integrated Manufacturing, 2018, 53: 178-186.
[13] RUI Fu-kui, YAMADA Y, MITSUDOME K, et al. HanGrawler: Large-Payload and High-Speed Ceiling Mobile Robot Using Crawler[J]. IEEE Transactions on Robotics, 2020, 36(4): 1053-1066.
[14] FISCHER W, TACHE F, SIEGWART R. Inspection System for very Thin and Fragile Surfaces, Based on a Pair of Wall Climbing Robots with Magnetic Wheels [C]//2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA. IEEE, 2007: 1216-1221.
[15] LA H M, DINH T H, PHAM N H, et al. Automated Robotic Monitoring and Inspection of Steel Structures and Bridges[J]. Robotica, 2019, 37(5): 947-967.
[16] GARRIDO G G, SATTAR T P. An Autonomous Wall Climbing Robot for Inspection of Reinforced Concrete Structures: SIRCAUR[J]. Journal of Artificial Intelligence and Technology, 2021, 1: 188-198.
[17] MAHMOUD T. OmniClimbers: Omni-Directional Magnetic Wheeled Climbing Robots for Inspection of Ferromagnetic Structures[J]. Robotics and Autonomous Systems, 2013, 61(9): 997-1007.
[18] TAVAKOLI M, MARQUES L, DE ALMEIDA A T. OmniClimber: An Omnidirectional Light Weight Climbing Robot with Flexibility to Adapt to Non-Flat Surfaces [C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve, Portugal. IEEE, 2012: 280-285.
[19] NUNUPAROV A M, CHASHCHUKHIN V G. Control System of an Aerodynamically Adhesive Wall-Climbing Robot[J]. Journal of Computer and Systems Sciences International, 2020, 59(2): 301-309.
[20] XIAO Jun, XIAO J Z, XI Ning, et al. Fuzzy Controller for Wall-Climbing Microrobots[J]. IEEE Transactions on Fuzzy Systems, 2004, 12(4): 466-480.
[21] KIM H, KANG T, LOC V G, et al. Gait Planning of Quadruped Walking and Climbing Robot for Locomotion in 3D Environment[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain. IEEE, 2006: 2733-2738.
[22] INOUE K, TSURUTANI T, TAKUBO T, et al. Omni- Directional Gait of Limb Mechanism Robot Hanging from Grid-Like Structure[C]//2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China. IEEE, 2007: 1732-1737.
[23] SINTOV A, AVRAMOVICH T, SHAPIRO A. Design and Motion Planning of an Autonomous Climbing Robot with Claws[J]. Robotics and Autonomous Systems, 2011, 59(11): 1008-1019.
[24] FUNATSU M, KAWASAKI Y, KAWASAKI S, et al. Development of CM-Scale Wall Climbing Hexapod Robot with Claws[C]// Proceedings of the 3rd International Conference on Design Engineering and Science (ICDES), Pilsen, 2014: 101-106.
[25] KO H, YI H, JEONG H E. Wall and Ceiling Climbing Quadruped Robot with Superior Water Repellency Manufactured Using 3D Printing (UNIclimb)[J]. International Journal of Precision Engineering and Manufacturing-Green Technology, 2017, 4(3): 273-280.
[26] LIU Yan-heng, LIM B, LEE J W, et al. Steerable Dry- Adhesive Linkage-Type Wall-Climbing Robot[J]. Mechanism and Machine Theory, 2020, 153: 103987.
[27] SCHOENEICH P, ROCHAT F, NGUYEN O T D, et al. TRIPILLAR: A Miniature Magnetic Caterpillar Climbing Robot with Plane Transition Ability[J]. Robotica, 2011, 29(7): 1075-1081.
[28] MURPHY M P, SITTI M. Waalbot: An Agile Small- Scale Wall-Climbing Robot Utilizing Dry Elastomer Adhesives[J]. IEEE/ASME Transactions on Mechatronics, 2007, 12(3): 330-338.
[29] 韩力春, 王黎明, 尹洋. 船用爬壁机器人的研究现状[J]. 人工智能与机器人研究, 2020(4): 261-271. HAN Li-chun, WANG Li-ming, YIN Yang. Research Status of Marine Wall-Climbing Robot[J]. Artificial Intelligence and Robotics Research, 2020(4): 261-271.
[30] KIM D, KIM Y S, NOH K, et al. Wall-Climbing Robot with Active Sealing for Radiation Safety of Nuclear Power Plants[J]. Nuclear Science and Engineering, 2020, 194(12): 1162-1174.
[31] HU Jun-yu. A Magnetic Crawler Wall-Climbing Robot with Capacity of High Payload on the Convex Surface[J]. Robotics and Autonomous Systems, 2022, 148: 103907.
[32] WANG Yang, ZHANG Xiao-jun, ZHANG Ming-lu, et al. Self-Compliant Track-Type Wall-Climbing Robot for Variable Curvature Facade[J]. IEEE Access, 2021, 10: 51951-51963.
[33] Magnetic Crawler Climbing Detection Robot Basing on Metal Magnetic Memory Testing Technology[J]. Robotics and Autonomous Systems, 2020, 125: 103439.
[34] 刘志辉, 蔡伟, 付兴伟, 等. 一种滚动密封爬壁机器人失效分析[J]. 中国机械工程, 2022, 33(22): 2755- 2763, 2771. LIU Zhi-hui, CAI Wei, FU Xing-wei, et al. Failure Analysis of a Rolling Sealed Wall Climbing Robots[J]. China Mechanical Engineering, 2022, 33(22): 2755- 2763, 2771.
[35] ZHANG Yu-long, GUAN En-guang, LI Pei-xing, et al. A Novel Magnetic Circuit Design Method for a Permanent Magnetic Chuck of a Wall-Climbing Robot[J]. Energies, 2022, 15(18): 6653.
[36] ZHANG Ming-lu, ZHANG Xuan, LI Man-hong, et al. Optimization Design and Flexible Detection Method of a Surface Adaptation Wall-Climbing Robot with Multisensor Integration for Petrochemical Tanks[J]. Sensors, 2020, 20(22): 6651.
[37] JIANG Ze, MA Zhe, JU Zhong-jin, et al. Design and Analysis of a Wall-Climbing Robot for Passive Adaptive Movement on Variable-Curvature Metal Facades[J]. Journal of Field Robotics, 2023, 40(1): 94-109.
[38] 朱世强, 高振飞, 宋伟, 等. 爬壁机器人翻越焊缝过程动力学建模研究[J]. 农业机械学报, 2020, 51(12): 377-383. ZHU Shi-qiang, GAO Zhen-fei, SONG Wei, et al. Dynamics Modelling of Process of Surmounting Weld Seam by Wall-Climbing Robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(12): 377-383.
[39] BIAN Shi-yuan, WEI Yu-liang, XU Feng, et al. A Four- Legged Wall-Climbing Robot with Spines and Miniature Setae Array Inspired by Longicorn and Gecko[J]. Journal of Bionic Engineering, 2021, 18(2): 292-305.
[40] BIAN Shi-yuan, XU Feng, WEI Yu-liang, et al. A Novel Type of Wall-Climbing Robot with a Gear Transmission System Arm and Adhere Mechanism Inspired by Cicada and Gecko[J]. Applied Sciences, 2021, 11(9): 4137.
[41] ZHU Hai-fei, LU Jun-hua, GU Shi-chao, et al. Planning Three-Dimensional Collision-Free Optimized Climbing Path for Biped Wall-Climbing Robots[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(5): 2712-2723.
[42] 鞠忠金. 4SRRR足式爬壁机器人设计与分析[D]. 秦皇岛: 燕山大学, 2020. JU Zhong-jin. Design and analysis of 4SRRR foot wall climbing robot[D]. Qinhuangdao: Yanshan University, 2020.
[43] LIU Jin-fu, XU Lin-sen, CHEN Shou-qi, et al. Development of a Bio-Inspired Wall-Climbing Robot Composed of Spine Wheels, Adhesive Belts and Eddy Suction Cup[J]. Robotica, 2021, 39(1): 3-22.
[44] 黄华, 王虎林, 王庆粉, 等. 一种基于行星履带轮越障与混合双吸附补偿的爬壁机器人的设计与研究[J]. 机器人, 2022, 44(4): 471-483. HUANG Hua, WANG Hu-lin, WANG Qing-fen, et al. Design and Research of a Wall-Climbing Robot Based on Planetary Crawler Wheel Obstacle Crossing and Hybrid Double Adsorption Compensation[J]. Robot, 2022, 44(4): 471-483.
[45] 郑勇峰, 刘昊学. 自适应轮足式爬壁机器人设计与分析[J]. 机械设计, 2021, 38(9): 105-112. ZHENG Yong-feng, LIU Hao-xue. Design and Analysis of the Self-Adaptive Wheel-Footed Wall-Climbing Robot[J]. Journal of Machine Design, 2021, 38(9): 105-112.
[46] Experimental Investigation on Climbing Robot Using Rotation-Flow Adsorption Unit[J]. Robotics and Autonomous Systems, 2018, 105: 112-120.
[47] KANADA A, GIARDINA F, HOWISON T, et al. Reachability Improvement of a Climbing Robot Based on Large Deformations Induced by Tri-Tube Soft Actuators[J]. Soft Robotics, 2019, 6(4): 483-494.
[48] 樊明, 梁鹏, 高学山, 等. 反推力吸附的爬壁机器人设计及实验研究[J]. 北京理工大学学报, 2022, 42(11): 1150-1158. FAN Ming, LIANG Peng, GAO Xue-shan, et al. Design and Experimental Research of Wall-Climbing Robot with Reverse Thrust Adsorption[J]. Transactions of Beijing Institute of Technology, 2022, 42(11): 1150-1158.
[49] LIANG Peng, GAO Xue-shan, ZHANG Qing-fang, et al. Design and Stability Analysis of a Wall-Climbing Robot Using Propulsive Force of Propeller[J]. Symmetry, 2020, 13(1): 37.
[50] LIANG Peng, GAO Xue-shan, ZHANG Qing-fang, et al. Analysis and Experimental Research on Motion Stability of Wall-Climbing Robot with Double Propellers[J]. Advances in Mechanical Engineering, 2021, 13(9): 168781402110477.
[51] ALKALLA M G, FANNI M A, MOHAMED A F, et al. EJBot-II: An Optimized Skid-Steering Propeller-Type Climbing Robot with Transition Mechanism[J]. Advanced Robotics, 2019, 33(20): 1042-1059.
[52] MYEONG W, MYUNG H. Development of a Wall- Climbing Drone Capable of Vertical Soft Landing Using a Tilt-Rotor Mechanism[J]. IEEE Access, 2018, 7: 4868- 4879.
[53] LEE G, KIM H, SEO K, et al. Series of Multilinked Caterpillar Track-Type Climbing Robots[J]. Journal of Field Robotics, 2016, 33(6): 737-750.
[54] DHARMAWAN A G, XAVIER P, HARIRI H H, et al. Design, Modeling, and Experimentation of a Bio-Inspired Miniature Climbing Robot with Bilayer Dry Adhesives[J]. Journal of Mechanisms and Robotics, 2019, 11(2): 020902.
[55] BROWN J M, AUSTIN M P, MILLER B D, et al. Evidence for Multiple Dynamic Climbing Gait Families[J]. Bioinspiration & Biomimetics, 2019, 14(3): 036001.
[56] 崔宗伟, 孙振国, 陈强, 等. 两端吸附式焊缝修形爬壁机器人研制[J]. 机器人, 2016, 38(1): 122-128. CUI Zong-wei, SUN Zhen-guo, CHEN Qiang, et al. Wall Climbing Robot Based on Two-End Adsorption for Weld Seam Amending[J]. Robot, 2016, 38(1): 122-128.
[57] SEO T, SITTI M. Tank-Like Module-Based Climbing Robot Using Passive Compliant Joints[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(1): 397-408.
[58] 付宜利, 李志海. 爬壁机器人的研究进展[J]. 机械设计, 2008, 25(4): 1-5. FU Yi-li, LI Zhi-hai. Researching Headway of Wall- Climbing Robots[J]. Journal of Machine Design, 2008, 25(4): 1-5.
[59] 孙玲, 弓永军, 王祖温, 等. 船用壁面作业机器人综述[J]. 液压与气动, 2014(10): 21-25. SUN Ling, GONG Yong-jun, WANG Zu-wen, et al. Review of Marine Wall Climbing Robot[J]. Chinese Hydraulics & Pneumatics, 2014(10): 21-25.
[60] 黄龙, 张卫华, 陈今茂, 等. 爬壁机器人的研究现状与发展趋势[J]. 机械工程与技术, 2021(3): 345-363. HUANG Long, ZHANG Wei-hua, CHEN Jin-mao, et al. A Review and Trend of Wall-Climbing Robots[J]. Mechanical Engineering and Technology, 2021(3): 345-363.
Review on Development Status and Key Technologies of Wall-climbing Robots
JIANG Zea, WANG Minb, ZHAO Zhea, LI Yi-chaoa, XU Yun-doua,c
(a.Parallel Robot and Mechatronic System Laboratory of Hebei Province, b.Yanshan University Library, c.Key Laboratory of Advanced Forging & Stamping Technology and Science, Ministry of Education of China, Yanshan University, Hebei Qinhuangdao 066004, China)
The work aims to sort out, analyze and summarize the research progress of wall-climbing robots in order to solve the practical application problems of products with the development of wall-climbing robot technology and discuss the future development directions to provide ideas and references for designing wall-climbing robots used in high-risk environments and special scenarios. Firstly, wall-climbing robots were divided into crawler, wheeled, legged, and hybrid wall-climbing robots according to movement modes. The wall-climbing robots with different movement modes were reviewed by literature research method. Secondly, the wall-climbing robots with different adsorption methods such as vacuum, magnetic, and thrust adsorption were compared. The research status and existing problems of adaptive technology of wall-climbing robots were introduced. Finally, the development trend of wall-climbing robots in industrial and military fields was summarized and analyzed. The research status of wall-climbing robots with different movement modes in China and abroad is summarized, the advantages and disadvantages of wall-climbing robots with different adsorption methods are analyzed, and the development directions of wall-climbing robots are summarized and predicted.
wall-climbing robot; movement method; adsorption method; adaptivity
TB472
A
1001-3563(2023)12-0029-10
10.19554/j.cnki.1001-3563.2023.12.003
2023–02–09
国家自然科学基金(51875495);河北省教育厅在读研究生创新能力培养资助项目(CXZZBS2023059)
姜泽(1994—),男,博士生,主要研究方向为爬壁机器人装备及智能化系统设计。
许允斗(1985—),男,博士,教授,主要研究方向为并联机器人、可展机构、特种机器人技术。
责任编辑:马梦遥
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
力学学报(2022年6期)2022-07-10
中国特种设备安全(2021年12期)2021-04-26
浙江大学学报(工学版)(2016年11期)2016-06-05
广东石油化工学院学报(2016年6期)2016-05-17
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
振动工程学报(2014年4期)2014-03-01
天然气勘探与开发(2014年4期)2014-02-28