六种自制体位摆放用具在泌尿外科机器人手术中的应用
2023-06-23 17:23陈雪莉马建中崔福荣
机器人外科学 2023年3期
陈雪莉 马建中 崔福荣
摘 要 目的:探討6种自制体位摆放用具的制作方法及其在泌尿外科机器人手术中的应用效果。方法:选取2021年4月—2022年2月于聊城市人民医院行泌尿外科机器人手术患者69例,其中32例患者取头低仰卧分腿位并使用自制颈肩约束带代替肩档,自制棉腿套及多功能约束带分别固定下肢与床板;37例患者侧卧位采用自制肩垫抬高肩峰与健侧腰部,棉腿套包裹下肢且用体位垫支托,多功能约束带及双条宽胶布代替侧卧位档固定患者。观察患者术中体位稳定性、术野暴露情况、手术时长、机械臂接机时长、体位持续时长、患者术后皮肤状况及有无体位并发症发生。结果:69例患者术中体位稳定,术野暴露充分,20例机器人辅助腹腔镜前列腺癌根治术(Robot-assisted Laparoscopic Radical Prostatectomy,RALRP)患者手术时长为132~215min,机械臂接机时长为92~173min,头低仰卧位时长为102~185min;12例机器人辅助腹腔镜膀胱全切术(Robot-assisted Laparoscopic Total Cystectomy,RALTC)患者手术时长为245~375min,机械臂接机时长为155~208min,头低仰卧位时长为192~295min;37例机器人辅助腹腔镜肾部分切除术(Robot-assisted Laparoscopic Partial Nephrectomy,RALPN)患者手术时长为105~173min,机械臂接机时长为65~145min,侧卧位时长为115~180min。患者术后皮肤完整,术毕72h回访无肢体疼痛、下肢深静脉血栓形成及神经损伤等并发症的发生。结论:在摆放泌尿外科机器人手术体位时,6种自制体位摆放用具不仅能使患者身体舒适,减少体位并发症的发生,而且也能方便术者操作及机械臂的灵活摆动,并节约护理成本,自制体位摆放用具方便清洗灭菌和擦拭消毒,也符合手术室消毒隔离原则。
关键词 泌尿外科;机器人辅助手术;手术体位;体位用具;人字分腿位;侧卧位
中图分类号 R608 R69 文献标识码 A 文章编号 2096-7721(2023)03-0220-07
Application of six self-made positioning devices in robotic urologic surgery
CHEN Xueli, MA Jianzhong, CUI Furong
( Operating Room, Liaocheng Peoples Hospital, Liaocheng 252000, China)
Abstract Objective: To introduce the application effect of six self-made positioning devices in robotic urologic surgery. Methods: From April 2021 to February 2022, 69 cases of robotic urologic surgeries in Liaocheng Peoples Hospital were selected. Self-made neck and shoulder restraint belts were used to replace shoulder gear in 32 cases under Trendelenburg position, self-made cotton leg sleeves and multi-functional restraint belts were used to fix lower limbs and bed plate respectively. 37 cases in lateral position, self-made shoulder pads were used to raise the acromion and the healthy side of waist, cotton leg sleeves were used to wrap the lower limbs and positioning pads to support the patients. Multifunctional restraint belt and double sided sticky tape were used to fix patients in lateral position. The intraoperative postural stability, exposure of operative field, operative time, mechanical arm docking time, posture duration, postoperative skin condition and complications of patient positioning were observed. Results: Positions of 69 patients were all stable and the operative field was fully exposed. The operative time of 20 patients under Robot-assisted Laparoscopic Radical Prostatectomy (RALRP) was (132 to 215)min, with the mechanical arm docking time of (92 to 173)min, and the time of Trendelenburg position of (102 to 185)min. The operative time of 12 patients under Robot-assisted Laparoscopic Total Cystectomy (RALTC) was (245 to 375) min, with the time of mechanical arm docking of (155 to 208) min, and the time of Trendelenburg position of (192 to 295) min. The operative time of 37 patients under Robot-assisted Laparoscopic Partial Nephrectomy (PALPN) was (105 to 173)min, with the mechanical arm docking time of (65 to 145)min, and the lateral position time of (115 to 180)min. Patients skin was intact after operation. There were no complications such as limb pain, lower extremity deep venous thrombosis or nerve injury after 72 hours of follow-up. Conclusion: Six self-made positioning devices could not only make patients comfortable and reduce positioning complications in robotic urologic surgery, but also facilitate surgeons to operate mechanical arms flexibly, as well as saving nursing care cost. Meanwhile, self-made positioning devices are easy-cleaning, sterilizing and disinfecting, which is worthy of promotion in the operating room with robotic surgical system.
Key words Urologic surgery; Robot-assisted surgery; Surgical position; Positioning device; Herringbone leg position; Lateral position
达芬奇机器人手术系统自从1999年1月上市以来,已经发展到了第4代Xi系列,其放大10倍的三维高清手术视野、真实的深度感知、增强人体工程学设计理念等优势增加了主刀医生的操作稳定性与舒适性,更加灵活的机械臂关节则更适合精细解剖,以达到多角度缝合重建的手术效果[1]。截至2022年2月,国内达芬奇机器人手术量为293 508 例,其中泌尿外科手术量达134 003例。泌尿外科机器人手术体位涉及头低仰卧分腿位、侧卧位和半侧卧位。手术体位安置的原则是充分暴露视野,方便术者操作,防止患者术中移位,若体位摆放不当则可造成患者皮肤压力性损伤、神经肌肉损伤及肢体功能受限[2]。为了降低体位并发症,增加患者术中舒适度、稳定性、保暖性,本团队自行设计了6种泌尿外科体位用具,现将其应用效果报道如下。
1 资料与方法
1.1 临床资料
选取2021年4月—2022年2月于聊城市人民医院行泌尿外科机器人手术患者69例,其中行机器人辅助腹腔镜前列腺癌根治术(Robot-assisted Laparoscopic Radical Prostatectomy,RALRP)患者20例和行机器人辅助腹腔镜膀胱全切术(Robot-assisted Laparoscopic Total Cystectomy,RALTC)患者12例采取头低仰卧分腿位,其余行机器人辅助腹腔镜肾部分切除术(Robot-assisted Laparoscopic Partial Nephrectomy,RALPN)患者37例采取侧卧位。患者纳入标准:年龄>18岁,体质量指数为18.5~23.9kg/m2,术前皮肤完好,查体及实验室检查无低蛋白、糖尿病及青光眼症状。头低仰卧分腿位使用的体位摆放用具为:自制颈肩约束带、多功能约束带、棉腿套2个;侧卧位体位摆放用具为:自制肩垫2个、棉腿套2个、下肢体位垫、双条宽胶带贴、多功能约束带及上、下肢托手架(MAQUET公司产品)。机器人手术体位摆放团队组成:该团队有6名医护人员,均为本科及以上学历,中级及以上职称,手术室及泌尿外科工作5年以上。所有人员均赴上海或北京参加达芬奇手术机器人国际培训中心的培训[3],获得资格认证后,参与手术体位管理。在床旁机械臂安置过程中,巡回护士均评估体位是否安全稳定,防止机器人底座挤压肢体或机械臂摆动碰撞肢体。
1.2 方法
1.2.1 6种自制体位摆放用具制作方法
1.2.1.1 颈肩约束带:取一长130cm、宽55cm的长方形布单,在距长30cm处挖一半径约15cm的半圆形颈部出口,留取约15cm的剑突上布面及两对前胸系带,在侧胸壁缝制两对约15cm系带,胸部下端留两条约65cm的床缘绑带(如图1)。
1.2.1.2 多功能约束带:取一长70cm、宽60cm的双层夹棉长方形布单,在距四角10cm的位置接4条长约65cm、宽约5cm的绑带,四角及宽面修剪成如图2形状。
1.2.1.3 棉腿套:制作两个长60cm、宽30cm的双层夹棉靴形布套,留取膝关节处开口为下肢出入口(如图3)。
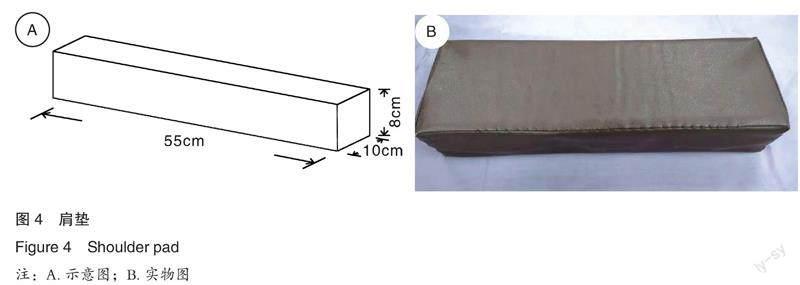
1.2.1.4 肩垫:选取一长55cm、宽10cm、高8cm的海绵垫,外罩防水防污油布(如图4)。
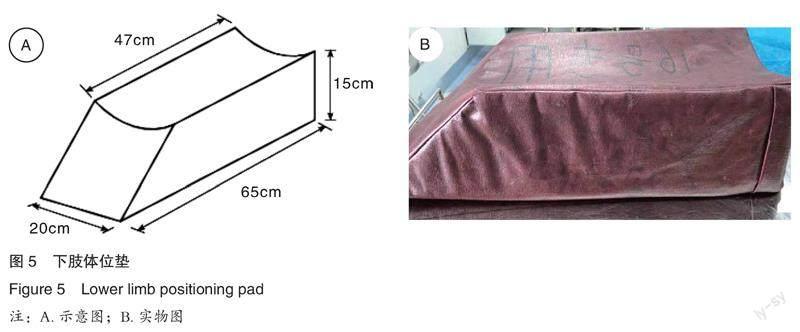
1.2.1.5 下肢体位垫:取一长65cm、宽20cm、高15cm的海绵垫,将海绵垫的一端剪成斜面,并使上面长度为47cm,在上面挖一下陷约3cm弧形凹槽,海绵垫制好后外罩防水油布(如图5)。
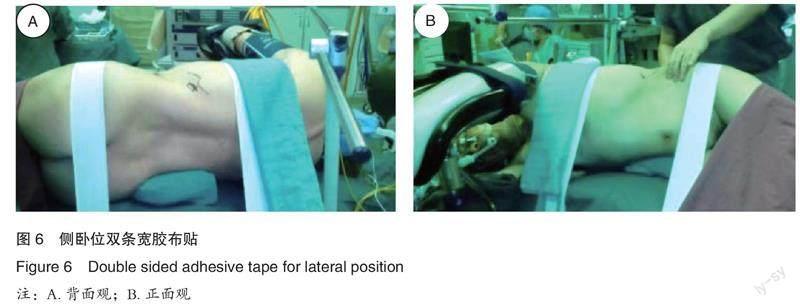
1.2.1.6 双条宽胶布贴:取两条长150cm、宽10cm的医用胶布贴(如图6)。
1.2.2 体位摆放方法
1.2.2.1 头低仰卧分腿位摆放:采用自制颈肩约束带代替肩档,术前巡回护士铺好变温毯和手术床横单,患者入手术间后在平车上穿好自制颈肩约束带后躺于手术床,骶尾部粘贴15cm×15cm的自粘性软聚硅酮防压敷料,臀部靠近手术床腿板处,双下肢穿好棉腿套。待静吸复合全麻完毕,患者双上肢用横单包裹,将颈肩约束带2个绑带固定于手术床两侧缘,分开手术床腿板40°~50°,用2个多功能约束带将下肢与腿板固定。机器人机械臂对接前,改为头低30°的人字分腿仰卧位,接机后撤机前不可调动手术床,撤机后根据手术医生需求改为仰卧分腿位。
1.2.2.2 侧卧位摆放:采用自制双条宽胶布贴代替侧卧位档,患者躺于手术床后腰部对准手术床腰桥处,健侧髂前上棘与股骨大转子处各粘贴10cm×10cm的自粘性软聚硅酮防压敷料,固定上下肢托手架,待静吸复合全麻完毕,取患者90°健侧卧位,距肩峰10cm处及腰下放置两个自制肩垫,调节手术床呈“へ”形,双下肢用棉腿套包裹,患侧下肢前置于自制下肢体位垫上,腘窝处贴于体位垫斜坡面,将双条宽胶布贴分别黏贴于腋下及髂前上棘处,并与两侧床缘固定,多功能约束带固定双下肢。接机后撤机前不再调动手术床,撤机后根据手术医生需求改为水平侧卧位。
1.2.3 观察指标
观察患者术中体位稳定性、术野暴露情况、手术时长、机械臂接机时长、体位持续时长、患者术后皮肤状况及有无体位并发症发生。
2 结果
所有患者术中体位稳定,手术视野暴露充分,未有因体位移动影响手术进程者。20例RALRP患者手术时长为132~215min,机械臂接机时长为92~173min,头低仰卧位时长为102~185min;12例RALTC患者手術时长为245~375min,机械臂接机时长为155~208min,头低仰卧位时长为192~295min;37例RALPN患者手术时长为105~173min,机械臂接机时长为65~145min,侧卧位时长为115~180min。患者体位复位后检查皮肤有1例头低仰卧位骶尾部防压敷料处和1例侧卧位健侧大转子防压敷料处有压之褪色的红润,15min后再次检查颜色正常,皮肤均完整无损,术毕72h回访患者,无肢体疼痛、下肢深静脉血栓形成及神经损伤等并发症的发生。
3 讨论
3.1 自制体位摆放用具能满足达芬奇机器人泌尿外科“人”字分腿位手术需求
与普通腹腔镜手术比较,达芬奇机器人手术体位要求更高,接机后禁止调动手术体位和手术床,患者体位需更加牢固与舒适,且头低仰卧位时头低角度更大[4]。自制体位垫符合人体工学理念,能提高患者舒适度,减少皮肤压力性损伤,且可以起到保暖的效果。泌尿外科机器人前列腺癌手术和膀胱全切手术中在Trocar置入成功后,可将患者摆成头低足高位呈30°。尤其是保留耻骨后间隙的前列腺癌根治术,因手术视野的需要,术中头低足高位的角度可达40°[5]。由于传统的肩档与患者肩部皮肤接触过少,故而极易挤压并造成肩部疼痛、皮肤压力性损伤或臂丛神经损伤[6];而自制颈肩约束带可完全包裹患者肩背部,且与皮肤接触面积大,身体贴合度高,压力分散均匀[7]。头低位时,用自制棉腿套和多功能约束带将下肢与手术床腿板固定,并用腿套包裹双下肢,可减少患者皮肤暴露,提高舒适度,且棉腿套及夹棉约束带的使用可以避免患者术中受到机械臂撞伤及皮肤压力性损伤[8-9]。32例头低仰卧分腿位患者中,术后有1例患者骶尾部防压敷料处皮肤发红,应该与患者年龄(78岁)、手术时间(360min)、身体消瘦(BMI为18.5kg/m2)有关,解除压力15min后皮肤颜色恢复正常。
3.2 自制体位摆放用具能满足达芬奇机器人泌尿外科侧卧位手术需求
经腰侧卧位泌尿外科手术需要在后腹腔建立一人为操作空间,机械臂对接前2名助理医师需要站立在患侧腰部两侧操作并置入机械臂Trocar,用双条宽胶布贴代替侧卧位档,方便手术医师占位及移位;肩峰下10cm及腰下置2个自制肩垫,可充分暴露腰部,保证呼吸循环功能正常,避免腰桥过度抬高致头部过低而导致的皮肤张力增大及面部充血;双下肢用棉腿套包裹且患侧下肢置于自制体位垫上,有凹槽的一面贴合小腿,斜坡处沿大腿下部自然顺延,膝关节内侧正好位于斜坡与水平面交接的空隙处,方便两腿前后分开摆放,且避免腘窝处神经血管受压,有利于血液回流,从而保障患者安全[10-11];夹棉多功能约束带基本覆盖髋关节以下部位,可减少患者皮肤暴露,且增加保暖性与舒适度。37例侧卧位患者术中有1例大转子受压处皮肤发红,应该与患者为压力性损伤高危人群有关,恢复仰卧位15min后皮肤颜色恢复正常。
3.3 自制体位摆放用具的优点
自制颈肩约束带、多功能约束带、棉腿套以布料和棉花为制作材料,下肢体位垫和肩垫以海绵和防污油布为制作材料,这些体位用具取材方便,成本经济,制作简单,均可以由医院后勤服务中心或布类加工单位制作完成。布类用具可以一用一清洗灭菌,外罩防污油布用具可以一用一擦拭消毒。使用自制体位摆放用具可方便“医、护、洁”工作,有效降低患者交叉感染的发生,符合手术室物品消毒隔离的原则且可以减少医院成本支出[12-13]。可制作多套前述6种自制体位用具存放于机器人手术间,以方便管理使用,并可满足机器人手术间使用频率高、节奏快的需求。
综上所述,在达芬奇机器人泌尿外科手术中,6种自制体位摆放用具的良好使用及手术体位的正确安置不仅能增加患者体位牢固性和身体舒适度,减少体位并发症的发生,而且还能方便术者操作及机械臂的灵活摆动,并节约护理成本。自制体位摆放用具方便清洗灭菌和擦拭消毒,符合手术室消毒隔离原则。6种自制体位摆放用具适用于相同术式的普通腹腔镜手术,值得在临床中推广应用。
致谢:感谢直观复星医疗器械技术有限公司提供达芬奇机器人手术资料。
参考文献
[1] 刘艳燕, 易跃雄, 张蔚, 等. 第四代达芬奇机器人Xi系统辅助单孔和多孔腹腔镜治疗妇科良性疾病围手术期效果分析[J].中国实用妇科与产科杂志, 2021, 37(6): 679-682.
[2] 郭莉. 手术室护理实践指南(2021年版)[M]. 北京: 人民卫生出版社, 2021: 42-48.
[3] 陆彤, 刘佳, 芮琳. 改良体位预防患者在达芬奇机器人手术中医疗器械相关压力性损伤的效果观察[J].护理学报, 2020, 27(1): 70-72.
[4] 孙大鹏, 申兵, 乔芳芳, 等. 机器人辅助腹腔镜下前列腺癌根治性切除术改良仰卧位与常规体位的对照研究[J].机器人外科学杂志(中英文), 2022, 3(2): 115-119.
[5] 趙剑侠, 高明芳, 侯娟茹, 等.机器人辅助腔镜手术中体位的安全管理及护理体会[J].中华腔镜外科杂志(电子版), 2016, 9(6): 382-384.
[6] 郭月, 李乔. 机器人辅助全腹腔镜下膀胱根治性切除原位回肠新膀胱术的护理配合[J].机器人外科学杂志(中英文), 2021, 2(3): 181-185.
[7] 陈雪莉, 史艳蕾, 肖岩, 等. 改良体位护理在腹腔镜直肠癌Dixon手术患者中的应用[J].中国临床护理, 2021, 13(8): 478-481.
[8] 高凤兰, 张晓静, 张伟. 达芬奇机器人辅助下尿路手术病人的体位安全管理[J].护理研究, 2018, 32(15): 2469-2470.
[9] 沈洁芳, 郭健, 黄海燕, 等. 达芬奇机器人辅助下甲状腺手术的体位护理探讨[J].上海护理, 2018, 18(9): 61-63.
[10] 高兴莲, 余文静, 肖瑶, 等. 手术患者围术期压力性损伤预防及管理最佳证据总结[J].护理学报, 2021, 28(6): 22-26.
[11] 吴莉娜, 李洪亮, 李娜, 等. 人体工学理念在泌尿外科手术体位中的应用体会[J].当代护士(下旬刊), 2016, (8): 119-120.
[12] 曾洋.洁净手术室院内感染现状及控制措施分析[J].解放军预防医学杂志, 2020, 38(7): 26-28.
[13] 韩楠.手术室感染控制路径对良性肿瘤剥除术患者围术期院感及术后康复时间的影响[J].国际护理学杂志, 2021, 40(10): 1823-1826.
猜你喜欢
医疗装备(2023年11期)2023-06-26
现代泌尿外科杂志(2022年7期)2022-08-01
现代泌尿外科杂志(2022年6期)2022-07-06
现代泌尿外科杂志(2022年5期)2022-06-09
健康体检与管理(2022年2期)2022-04-15
中国临床医学(2018年4期)2018-08-31
女性天地(2016年9期)2017-04-25
中国当代医药(2015年16期)2015-03-01
医学理论与实践(2015年11期)2015-02-24
卫生职业教育(2014年24期)2014-05-20