达芬奇机器人手术系统三孔与四孔入路在肺癌根治术围手术期中的疗效对比
2023-06-23 17:23白向豆曾伟强崔百强王兵杨宁贺晓阳张斯渊金大成苟云久
机器人外科学 2023年3期
白向豆 曾伟强 崔百强 王兵 杨宁 贺晓阳 张斯渊 金大成 苟云久

摘 要 目的:對比达芬奇机器人手术系统三孔与四孔入路在肺癌根治术中的围手术期疗效。方法:回顾性分析本院2016—2020年142例行肺癌根治术患者的临床资料。根据手术方式的不同将其分为三孔组和四孔组,74例患者行达芬奇机器人下四孔肺癌根治术(四孔组),其中男40例、女34例;68例患者行达芬奇机器人下三孔肺癌根治术(三孔组),其中男38例、女30例。比较两组患者的临床资料。结果:与常规四孔入路相比,三孔入路组的手术时间长[(223.456±16.25)min Vs (192.635±19.92)min,P<0.001],术后卧床时间短[(3.544±0.76)d Vs (4.014±0.78)d,P<0.001],术后3d引流量少[(194.118±62.16)ml Vs (264.189±81.79)ml,P<0.001],术后带管时间短[(3.882±0.68)d Vs (4.338±0.81)d,P<0.001],术后住院时间短[(5.162±0.68)d Vs (5.703±0.85)d,P<0.001]以及术后第3d疼痛视觉模拟评分更低[(2.794±0.98) Vs (3.297±0.96),P=0.003];而两组在术中出血量、淋巴结清扫个数、术后并发症等方面差异无统计学意义(P>0.05)。结论:机器人辅助肺叶切除术安全有效,三孔入路在术后卧床时间、术后带管时间、术后引流、术后疼痛评分、术后快速恢复方面有明显优势,值得在熟练掌握常规四孔达芬奇机器人手术的医院进行推广。
关键词 机器人辅助手术;肺癌根治术;手术入路;短期疗效
中图分类号 R655.3 文献标识码 A 文章编号 2096-7721(2023)03-0214-06
Clinical efficacy comparison of three-port and four-port Da Vinci robot-assisted radical resection for lung cancer
BAI Xiangdou ZENG Weiqiang CUI Baiqiang WANG Bing YANG Ning HE Xiaoyang
ZHANG Siyuan JIN Dacheng GOU Yunjiu
(1. The First School of Clinical Medicine, Gansu University of Chinese Medicine, Lanzhou 730000, China; 2. No. 1 Department of Thoracic Surgery, Gansu Provincial Peoples Hospital, Lanzhou 730000, China)
Abstract Objective: To compare the perioperative effect of three-port and four-port Da Vinci robot-assisted radical resection for lung cancer. Methods: The clinical data of 142 patients who underwent robot-assisted radical resection of lung cancer in our hospital from 2016 to 2020 were analyzed retrospectively. The 142 patients were divided into the three-port group and the four-port group according to different surgical approaches. Among which, 74 patients were divided into the four-port group with 40 males and 34 females, and 68 patients into the three-port group with 38 males and 30 females. Results: Compared with the four-port group, the three-port group had longer operative time [(223.456 ±16.25) min Vs (192.635±19.92) min, P<0.001], shorter time in bed after surgery [(3.544±0.76) d Vs (4.014 ±0.78) d, P<0.001], less drainage volume after surgery [(194.118±62.16) ml Vs (264.189±81.79)ml, P<0.001)], shorter tube-retaining time after surgery[(3.882±0.68)d Vs 4.338±0.81)d, P<0.001)], shorter length of hospital stay [(5.162±0.68)d Vs 5.703±0.85)d, P< 0.001)], and lower visual analog scale (VAS) score on the 3rd day after surgery[(2.794±0.98) Vs (3.297±0.96mol), P=0.003]. There was no significant difference on intraoperative blood loss, number of lymph node dissection and postoperative complications between the two groups (P>0.05). Conclusion: Robot-assisted lobectomy is safe and effective. The three-port robot-assisted radical resection for lung cancer has obvious advantages on postoperative time in bed, tube-retaining time after surgery, postoperative drainage volume, postoperative pain score, postoperative recovery over the four-port approach, which is worth of promotion in hospitals with sufficient experience of four-port Da Vinci robot-assisted surgery.
Key words Robot-assisted surgery; Radical resection of lung cancer; Surgical approach; Short-term efficacy
近年來,肺癌的发病率逐年上升,对于早中期非小细胞肺癌(Non-small Cell Lung Cancer,NSCLC)的患者,以手术切除为主的综合治疗方案仍是首选[1-3]。随着微创技术的不断发展,以达芬奇机器人手术系统为代表的微创外科操作技术在肺癌根治术中已经逐渐普及[4-6],本院自2016年1月引进达芬奇机器人后奋起直追,在常规四孔入路行肺癌根治术的基础上,逐步开展三孔入路肺癌根治术。本研究回顾性分析行达芬奇机器人肺癌根治术的肺癌患者的临床资料,对比达芬奇机器人手术系统三孔与四孔入路在肺癌根治术中的围手术期疗效。
1 资料与方法
1.1 临床资料
收集本院2016 —2020年142例行机器人肺癌根治术患者的临床资料。纳入标准:不限性别,术前行气管镜、CT引导穿刺活检或术中快速冰冻病理检查明确诊断为肺恶性肿瘤,术前检查并评估心肺功能可耐受肺叶切除术。排除标准:为防止出现因术者或助手不同,从而产生偏倚的问题,本研究排除了部分不同术者进行手术的患者数据,以同一术者及助手的数据进行分析。
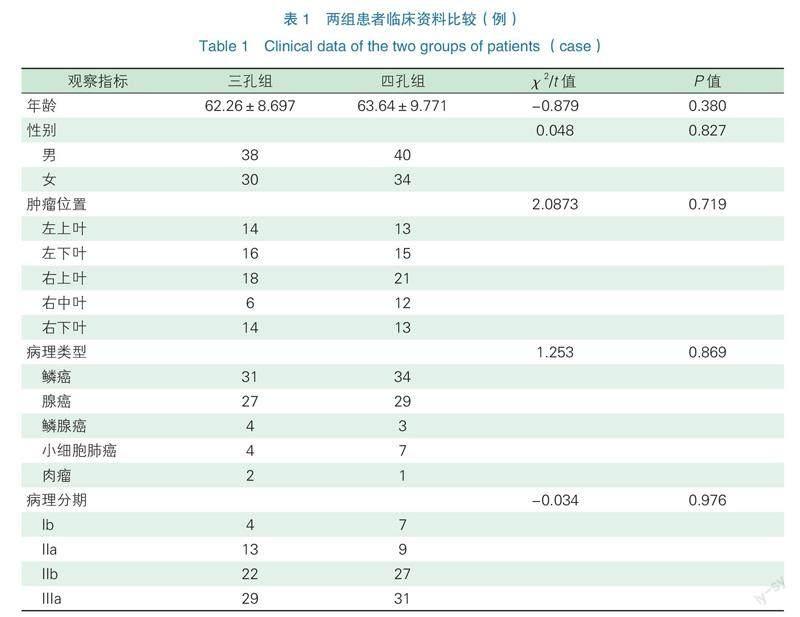
最终纳入研究的病例中,74例患者行达芬奇机器人下四孔肺癌根治术(四孔组),其中男40例、女34例;68例患者行达芬奇机器人下三孔肺癌根治术(三孔组),其中男38例、女30例。两组患者术前基本资料见表1。
1.2 手术方法
1.2.1 三孔组手术方法
患者双腔气管插管,采用静脉吸入复合全身麻醉,健侧单肺通气,取健侧卧位,双上肢屈曲抱枕折刀体位。腔镜孔12mm,置于腋中线第8肋间。为避免遮挡术中视野,本中心将其中一操作孔合并至辅助操作孔。根据病变位置,操作孔可放置于腋前线第6~8肋间,辅助操作孔可放置于腋后线间第5~7肋间。
1.2.2 四孔组手术方法
患者双腔气管插管,采用静脉吸入复合全身麻醉,健侧单肺通气,取健侧卧位,双上肢屈曲抱枕折刀体位。腔镜孔12mm,置于腋中线或腋后线第8肋间;其余两个操作孔分别放置于肩胛线第8肋间、腋前线与锁中线间第5肋间,根据病变位置选择相应的操作孔,于腋中线第7肋间行3~4cm切口作为辅助操作口。
两组肺叶切除根据肺裂发育情况而定,如果肺裂发育良好则采用解剖式,若肺裂发育不良则采用单向式肺叶切除术。顺利切除病变肺叶后清扫肺门(10、11组)、纵隔淋巴结(左侧:5、6、7、8、9组淋巴结;右侧:2、4、7、8、9组淋巴结)。术后留置1或2根引流管。
1.2.3 观察指标
观察记录术中及围手术期中的情况指标,包括手术时间(自切皮开始至缝合切口结束)、术中失血量、清扫淋巴结个数、术后卧床时间、术后3d内引流量、术后引流时间、术后平均住院时间、术后疼痛视觉模拟(Visual Analogue Scale,VAS)评分(术后第1d、2d、3d)及术后并发症发生率、术中中转率等情况。
1.3 统计学分析
所有数据采用SPSS 26.0软件进行统计分析。连续变量以均数±标准差(x±s)表示,组间比较采用两组独立样本t检验。分类变量以例数(n)或百分比(%)表示。以P<0.05为差异有统计学意义。
1.4 伦理审查
本研究已通过甘肃省人民医院伦理委员会审批(审批号:2021-233)。
2 结果
两组入选患者均顺利完成手术,术中无中转开胸或手术死亡病例。两组在性别、年龄、肿瘤位置、分期和病理分型等基线指标方面差异无统计学意义(P>0.05),见表1。三孔组68例,术式为双侧肺各肺叶切除并行淋巴结清扫,术后视情况扩大辅助操作孔,从而取出肺叶和肿块,术毕后,该孔留置引流管,并予以常规局麻镇痛。四孔组74例,术式同为双侧肺各肺叶切除并行淋巴结清扫,术后视需要扩大辅助操作孔,取出肺叶及肿块。术后,腔镜孔或辅助操作孔留置引流管,并予以常规局麻镇痛。
两组在手术时间、术后卧床时间、术后住院时间、术后3d引流量、术后引流时间及术后第3d VAS评分等方面差异有统计学意义(P<0.05)。在术中出血量、淋巴结清扫个数、术后并发症等方面差异无统计学意义(P>0.05),见表2。
3 讨论
据统计,在全球范围内,肺癌的发病率及其死亡率逐年升高且一直居高不下,预计到2025年,我国的肺癌患者将达到100万[7]。目前,针对可切除的非小细胞肺癌,术前明确无手术禁忌证后,以手术切除为主的综合治疗仍是有效治疗手段[8-10]。自2006年中国大陆引进达芬奇手术机器人系统后,其在胸外科手术中迅猛发展,以其创伤小、恢复快、清晰3D视野以及在淋巴结清扫中的显著优势,在肺癌根治术中逐渐崭露锋芒[11-13]。本中心自2016年起开始使用达芬奇手术机器人系统,在常规的四孔入路基础上总结经验,所开展的三孔入路下肺叶切除也已逐渐成熟。
本组研究结果显示,与常规四孔组相比,三孔组的手术时间更长。虽然在术前打孔装机时,相较于四孔组会节省一定时间。由于其中一操作臂与助手共用一辅助操作孔,在本中心开展三孔术式初期,术中操作臂与助手抓钳配合欠佳,导致手术时间略长于四孔组。
本研究结果提示,在术中出血量及术中清扫淋巴结方面,三孔入路与四孔入路未见明显差异。达芬奇手术系统与常规胸腔镜相比,具有稳定、清晰的3D视野,7个自由度的操作臂,以及自动过滤人手抖动的精确性,均为术中精细操作提供了技术保障[14]。故而术中出血显著低于常规胸腔镜手术,同时在淋巴结清扫方面展示出巨大的优势。在不同入路选择上,达芬奇机器人手术系统均能发挥其优势,因而在控制术中出血方面未见明显差异。但本中心在大量手术后发现,选择三孔入路时,尤其是在行左肺上叶手术时,术中离断如遇肺动脉干突发出血,紧急处理效率显著低于四孔入路[15],这也提示我们在处理肺门粘连术例时,应更加仔细小心。
本研究中三孔组的术后卧床时间及术后住院时间要低于常规四孔组,术后3d的引流量也更低,同时术后带管时间更短,笔者认为这是由于三孔入路取消了腋后线第7/8肋间的操作孔,术中对胸壁的损伤大幅减少,使术后引流较之前减少,患者肺部复张更快,从而更早地拔除胸腔引流管,这可以使患者术后尽早下地,避免胸腔粘连。同时,由于更早的脱管,患者主观疼痛显著降低,从而不会出现因疼痛带来的呼吸减弱以及对术后机械辅助排痰的配合欠佳,进而影响术后肺复张;由于没有床边引流瓶的限制,患者术后可以尽早下床活动,降低了因长时间卧床而发生的坠积性肺炎的发生率;同时,由于胸腔引流管与外界相通,细菌有机会通过引流管逆行而上,造成胸腔感染,因此,更早的脱管可以降低感染几率,从而减少术后抗生素的使用。此外,早期下床也可加速肠道蠕动,促进患者优质蛋白的摄入,加快术后恢复,故而降低了术后住院的时长。这也正是现代快速康复外科所提倡的[16-17]。
和四孔组相比,三孔组在术后第3d的VAS疼痛评分低于四孔组,而二者在术后第1d、2d未见明显差異。肺叶切除术后的疼痛来源主要包括两个方面:①术区切口肌肉、筋膜及神经的病理性疼痛;②术后引流管口摩擦和牵拉导致的疼痛。本中心在关闭切口前常规予以肋间神经阻滞,同时术后予以镇痛泵持续静脉给药镇痛。但四孔组在撤下镇痛泵后仍觉疼痛明显,难以忍受,仍需口服或肌注止痛药。同时,较长的带管时间,加剧了引流管对胸膜及管口的持续性刺激,加重患者疼痛,影响术后咳嗽咳痰、夜间睡眠、术后下床活动,进而延长术后住院时长以及加重患者经济负担。笔者认为,由于四孔组的辅助操作孔通常位于腋中线7/8肋骨间、操作孔位于肩胛线第8肋间,此处的肋间肌较厚,肋间神经及血管分布较腋前线丰富,故而相较于三孔入路,主观疼痛更为显著。但是在术后并发症方面,两者并无明显差异。
本次研究存在一定的缺点和不足,首先由于纳入研究的样本量相对较少,且数据来源为单中心,结果可能存在偏倚;其次,本研究为回顾性研究,缺乏长期生存分析,拟进一步通过随访完善数据。
综上所述,达芬奇机器人三孔入路技术现在作为一项成熟的外科手术技术,可以完成普胸外科大多数术式,甚至是复杂手术[18]。高龄患者肺癌围手术期因心肺功能等其他脏器储备功能差,术后康复风险相对较高,更需要一种操作精准、副损伤小的手术方式。而经本研究分析,相较已成熟的四孔入路技术,三孔入路在术后卧床时间、术后带管时间、术后引流、术后疼痛评分、术后快速恢复中有明显优势,值得在熟练掌握常规四孔达芬奇机器人手术及有条件的医院进行推广。
利益冲突:无
作者贡献:白向豆负责论文设计、实施研究、整理数据与分析、论文撰写与修改;王兵、金大成负责论文审阅与修改;张斯渊、杨宁、贺晓阳负责数据整理与分析;曾伟强、崔百强负责整理数据与论文修改;苟云久负责论文设计。
参考文献
[1] HAO J, LI N, CHENG W Q, et al. China Guideline for the Screening and Early Detection of Lung Cancer (2021, Beijing) [J]. China Cancer, 2021, 43(3): 243-268.
[2] FENG X, CANG S D. Interpretation of lung cancer screening guideline of China(T/CPMA 013-2020) [J]. Journal of Chinese Practical Diagnosis and Therapy, 2021, 35(3): 217-219.
[3] FU B J, ZHOU J Y. The challenge and prospect of the study of immunotherapeutic markers for lung cancer [J].Chinese Journal of Tuberculosis and Respiratory Diseases, 2020, 43(02): 87-91.
[4] 徐惟, 许世广, 李博, 等.机器人肺癌根治术围手术期并发症及预防策略分析[J]. 中华胸心血管外科杂志, 2020, 36(9): 539-542.
[5] 代锋, 许世广, 徐惟, 等.达芬奇机器人与电视胸腔镜辅助非小细胞肺癌根治术近期疗效配对的病例对照研究[J].中国肺癌杂志, 2018, 21(3): 206-211.
[6] Mahieu J, Rinieri P, Bubenheim M, et al. Robot-assisted thoracoscopic surgery versus video-assisted thoracoscopic surgery for lung lobectomy: can a robotic approach improve short-term outcomes and operative safety? [J].Thorac Cardiovasc Surg, 2016, 64(4): 354-362
[7] Nelson D B, Mehran R J, Mitchell K G, et al. Robotic-assisted lobectomy for non-small cell lung cancer: a comprehensive institutional experience[J]. Ann Thorac Surg, 2019, 108(2): 370-376
[8] 李根水, 刘建, 陈剑, 等.单孔与单操作孔胸腔镜肺癌根治术效果比较[J].山东医药, 2020, 60(17): 52-54.
[9] Rauma V, Andersson S, Robinson E M, et al. Thoracotomy and vats surgery in local non-small-cell lung cancer: differences in long-term health-related quality of life[J] .Clin Lung Cancer, 2019, 20: 378-383.
[10] Mason S, Abah U, Shackcloth M. Early diagnosis and correction of lobar torsion following VATS left upper lobectomy for lung cancer[J]. European Journal of Surgical Oncology, 2021, 47(1): e23.
[11] HU J J, CHEN Y, DAI J, et al. Perioperative outcomes of robot-assisted vs video-assisted and traditional open thoracic surgery for lung cancer: a systematic review and network meta-analysis[J] .Int J Med Robot, 2020, 16(5): 1-14.
[12] SONG G S, SUN X, MIAO S C, et al. Learning curve for robot-assisted lobectomy of lung cancer[J]. Journal of Thoracic Disease, 2019, 11(6): 2431.
[13] CHENG X H, HUANG JIA, LI J T, et al. Reply to the comments on‘Three-arm robot-assisted thoracoscopic surgery for locally advanced N2 non-small cell lung cancer, a better technique, new territory, and future hopes[J]. Journal of Thoracic Disease, 2019, 11(10): E198-E199.
[14] Gharagozloo F, Margolis M, Tempesta B. Robot-assisted thoracoscopic lobectomy for early-stage lung cancer[J]. Annals of Thoracic Surgery, 2008, 85(6): 1880-1886.
[15] Gharagozloo F, Margolis M, Tempesta B, et al. Robot-assisted lobectomy for early-stage lung cancer: report of 100 consecutive cases [J]. Annals of Thoracic Surgery, 2009, 88(2): 380-384.
[16] 馮锐, 冯競, 邹宗望, 等.快速康复外科在早期非小细胞肺癌微创手术中临床应用[J].中华肿瘤防治杂志, 2020, 27(8): 653-657.
[17] DONG Q, ZHANG K, CAO S Q, et al. Fast-track surgery versus conventional perioperative management of lung cancer-associated pneumonectomy: a randomized controlled clinical trial [J] .World J Surg Oncol, 2017, 15(1): 20.
[18] 许世广, 刘星池, 王希龙, 等.应用达芬奇机器人手术系统肺切除技术总结[J]. 中华胸部外科电子杂志, 2016, 3(2): 77-82.