
基于机器学习算法的图像边缘识别
2023-06-22 14:10朱建洲韩清宇林佳涛徐小雅
无线互联科技 2023年4期
朱建洲 韩清宇 林佳涛 徐小雅


摘要:文章首先改进边缘检测算法对图像边缘进行定位,使用双边滤波代替高斯滤波进行去噪处理,利用灰度相似性与几何相似性的权值分配边缘特征,提高精度:其次,在提取边缘坐标工作中利用多项式插值的方式提取出亚像素级精度的图像边缘坐标表示:最后,利用边缘轮廓追踪分析法实现了边缘线段分割,并将直线型、圆弧型以及椭圆弧型边缘进行曲线拟合,实现边缘几何属性提取。
关键词:亚像素边缘提取:边缘拟合:边缘提取算法
中图分类号:TP312
文献标志码:A
0 引言
边缘检测是图像处理和计算机视觉中的一个基本问题。边缘检测的目的是识别数字图像中灰度变化明显的点。边缘是反映图像结构和内容的重要特征之一。因此,图像边缘检测的研究对数字图像处理具有重要的意义。边缘是指目标对象与背景的边界。在现实应用中,只有对处理后的图像进行准确的边缘提取,才能有效實现目标与背景的分离。在现实的应用过程中,边缘识别领域中噪声处理、边缘识别以及边缘拟合问题亟待解决,为了减少数字图像噪声的影响,在使用效果较好的边缘检测算法的同时采用双边滤波对滤波处理进行优化:边缘数字特征的量化有助于工件检验等具体应用的延展,本文基于边缘识别后的边缘分割结果,将边缘以不同形式线段进行计算,最终实现边缘的量化。通过适用方法的组合,这些问题在本文中都给出了解决方案。
1 图像边缘问题分析
为有效提取亚像素边缘并转化为可量化特征,主要包括以下两个问题。
问题1:亚像素边缘提取,目标为对亚像素边缘提取方法进行建模分析,处理精度至少为0.1像素。为在消除边缘毛刺和阴影部分干扰的基础上,提取出图像主要边缘部分的亚像素边缘轮廓边界。在识别边缘的点集后,将点数据转化为有序边缘轮廓曲线数据。把提取的边缘轮廓输出为彩色边缘轮廓图像以获取边缘轮廓总数、边缘轮廓总长度、轮廓曲线的数量和长度、每条轮廓点的X和Y坐标数据。文中给出了每幅图上的等高线总数、每条曲线上的点数和长度数据。
问题2:边缘量化,本文利用亚像素轮廓边缘数据,建立模型,将边缘轮廓曲线数据自动分割拟合为直线段、圆弧段或椭圆网弧段,得到边缘轮廓自动分割和拟合的模型方法和策略。
2 亚像素边缘提取模型
2.1 模型基础
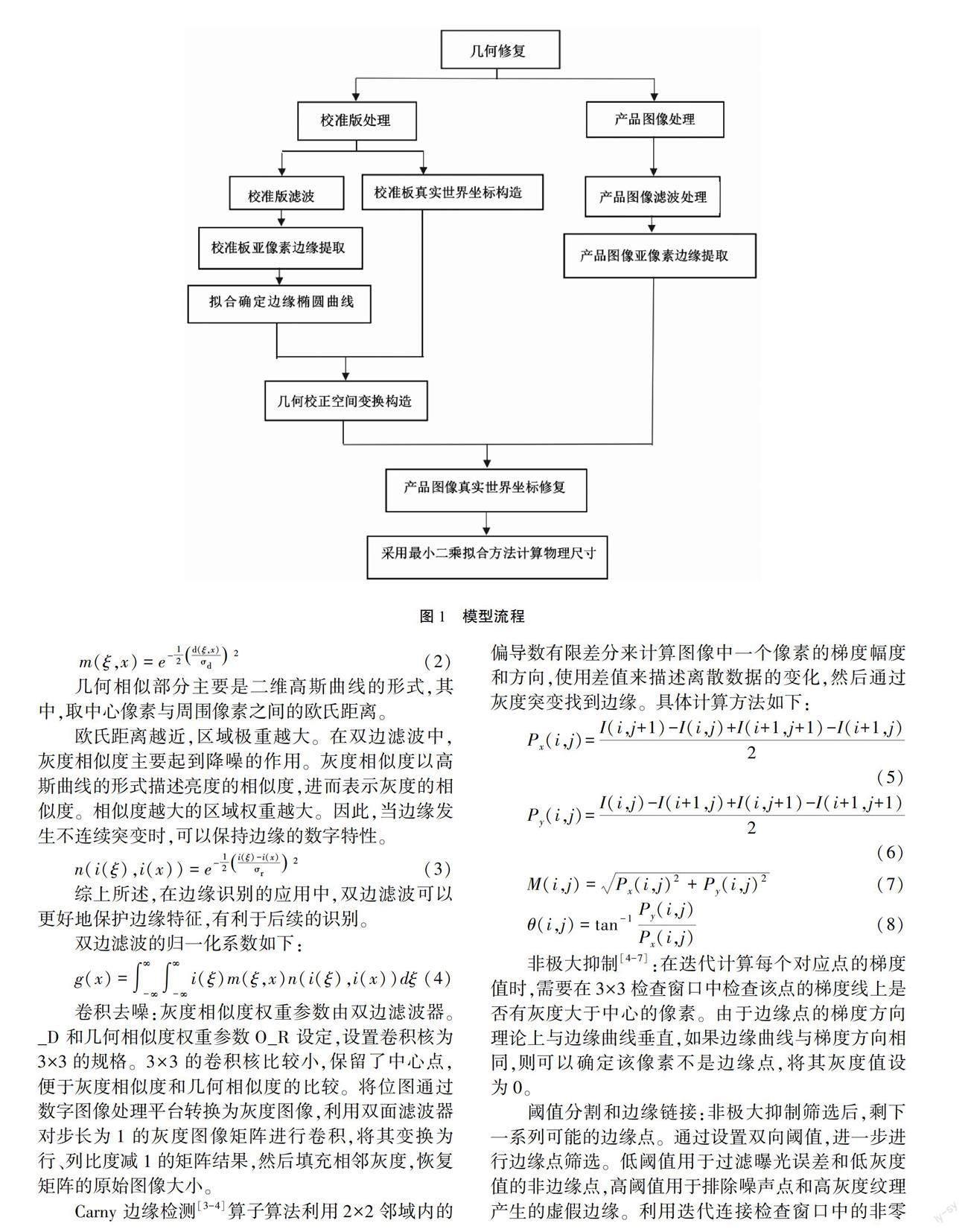
整体建模过程分为4个部分:
(1)选择一个滤波器对附件提供的图像进行预处理,用以消除由于设备和照明条件等因素造成的图像本身的噪声。
(2)采用Canny边缘检测算法对图像边缘进行粗略定位,找到像素基点进行进一步研究。
(3)采用多项式插值算法在粗定位像素的基础上寻找亚像素点,获得更高精度的图像边缘。
(4)采用边缘评价指标对边缘质量和精度进行评价,用于后续的模型分析。
2.2 模型的假设
附件1中的所有图像都进行了几何标定,即图像中的边缘不会失去特征,不会被扭曲。附件1中的图像是垂直于镜子拍摄的,没有严重的透视变形。所讨论的边缘类别仅为阶梯状边缘和屋顶状边缘,其中台阶边缘为主,屋顶边缘可以看作是台阶边缘的组合子像素分布在有序边缘点集组成的曲线上。子像素分布在有序边缘点集构成的曲线上。
2.3 具体解决步骤
2.3.1 图像去噪
由于数字图像信号在采样过程中会受到采样设备或采样环境的影响,因此会产生一定的图像噪声。在图像去噪过程中,本文选择使用双边滤波来改进使用高斯滤波的Canny边缘检测算法。
双边滤波器[1-2]根据灰度和几何位置这两个主要因素动态调整卷积核,尽可能保留边缘的主要特征。双边滤波器是反映灰度相似度和几何位置相似度值的组合。
几何相似部分主要是二维高斯曲线的形式,其中,取中心像素与周围像素之间的欧氏距离。
欧氏距离越近,区域极重越大。在双边滤波中,灰度相似度主要起到降噪的作用。灰度相似度以高斯曲线的形式描述亮度的相似度,进而表示灰度的相似度。相似度越大的区域权重越大。因此,当边缘发生不连续突变时,可以保持边缘的数字特性。
综上所述,在边缘识别的应用中,双边滤波可以更好地保护边缘特征,有利于后续的识别。
双边滤波的归一化系数如下:
卷积去噪:灰度相似度权重参数由双边滤波器。一D和几何相似度权重参数O_R设定,设置卷积核为3x3的规格。3x3的卷积核比较小,保留了中心点,便于灰度相似度和几何相似度的比较。将位图通过数字图像处理平台转换为灰度图像,利用双面滤波器对步长为1的灰度图像矩阵进行卷积,将其变换为行、列比度减1的矩阵结果,然后填充相邻灰度,恢复矩阵的原始图像大小。
Carny边缘检测[3-4]算子算法利用2x2邻域内的偏导数有限差分来计算图像中一个像素的梯度幅度和方向,使用差值来描述离散数据的变化,然后通过灰度突变找到边缘。具体计算方法如下:
非极大抑制[4-7]:在迭代计算每个对应点的梯度值时,需要在3x3检查窗口中检查该点的梯度线上是否有灰度大于中心的像素。由于边缘点的梯度方向理论上与边缘曲线垂直,如果边缘曲线与梯度方向相同,则可以确定该像素不是边缘点,将其灰度值设为0。
阈值分割和边缘链接:非极大抑制筛选后,剩下一系列可能的边缘点。通过设置双向阈值,进一步进行边缘点筛选。低阈值用于过滤曝光误差和低灰度值的非边缘点,高阈值用于排除噪声点和高灰度纹理产生的虚假边缘。利用迭代连接检查窗口中的非零像素实现边缘连接。
2.3.2 亚像素提取
多项式插值算法[8-9]:利用Canny边缘检测算法,可以得到具有像素级精度的边缘像素和像素梯度值,并根据拉格朗日插值法构造所有像素的唯一曲线。
2.4分析结果
2.4.1 總体分析
通过对边缘提取前后的对比分析,看出图像的亚像素边缘提取是比较成功的。通过放大显示,看到边缘是连续的且足够薄,经过对不同轮廓线段的对比分析表明,在亚像素精度下,整体视觉下的对称结构显示不完全对称。使视觉对称成立的主要因素可能与亚像素边缘曲线二阶偏导数高值段的位置对称性和长度相似有关。
2.4.2 双边过滤
结果利用MATLAB对图像进行分析,对图像进行双边滤波,得到前后对比,如图2所示。
2.4.3 亚像素轮廓提取结果
使用HDevelop软件对图像进行亚像素提取,得到图像的亚像素轮廓,得到的轮廓点总数为3 498,总长度为2 936. 99。
2.4.4 边缘轮廓数据
图上的等高线总数,每条曲线上的部分点数和长度数据如表1所示。
3 边缘轮廓分割模型[10-11]
由于切点处的曲率变化很大,需要处理的弧线采用曲率累积法检测切点。理论上,直线段的曲率累积线是一条水平线,弧段的曲率累积线是一条倾斜线,直线(或弧)和弧的切点是对应的两条曲率累积线的交点。计算待处理的弧线曲率累积线两端的线方程,然后计算每个曲率累积点到直线的距离,找到距离的最大点,即切点。根据切线点对处理的轮廓进行重新分割。
识别分割线段的形状,采用最小二乘法拟合分割线段,识别直线型、圆弧型和椭网弧型。
对于线性型最小二乘公式,设拟合直线的公式为y=ax+b,拟合直线的斜率为:
4 亚像素边缘提取模型的特点分析
4.1 优点与缺点
优点:(1)采用双边滤波器代替传统的中值滤波器或高斯滤波器,以保留边缘特征,尽可能消除图像噪声的影响;(2)利用当前更精确的Canny边缘检测算子,获得了一个相对较好的粗定位结果;(3)采用多项式插值算法,比拟合算法和矩法计算‘61代价轻、速度快。
缺点:(1)双边滤波器动态调整滤波器的算法会增加整体操作的时间复杂度,计算量过大,灰度相似度较低的σ,设置需要反复调整。(2)边缘检测算法的大小阈值设置需要根据不同的图像进行额外设置,需要提高模型的通用性。(3)与矩法和拟合算法相比,多项式插值算法的精度相对较低。
4.2 模型的应用和推广
增强现实应用开发,基于亚像素边缘检测,可以有效地检测现实世界中目标的边缘,对目标进行层次确认、检索和分析。通过亚像素和边缘检测,有助于捕获和放大真实图像信号、非法图像识别等功能。
在精密零件的检测中,可以通过亚像素边缘检测来分析精密零件的对称性、完整性和标准化等不同的形态特性。同时,利用边缘捕捉技术可以准确地确定零件的制造误差和特殊零件的损伤面积和损伤情况。
该模型可用于模具的实际生产。通过捕获的模具图像,可以获得图像中每个线段的几何属性的测量。与人工测量相比,它具有效率高、精度高的优点。
4.3 误差分析
亚像素边缘噪声接近于设定的阈值,因此算法无法排除该噪声。虽然该算法在亚像素点提取过程中形成了一些闭环点集,但总体上不影响对其他明显的亚像素边缘的检测和提取。同时,通过滤波消除了大部分阴影和照明的影响后,噪声闭环明显降低,但仍会受到真实物体的磨损造成的色差的影响,磨损区域将被纳入边缘检测类别。
5 结语
本文主要基于传统的Canny边缘检测算法之上,通过使用双边滤波代替高斯滤波的方式对边缘的粗定位进行优化,通过多项式插值算法求解出边缘上的亚像素点得到亚像素级精度的图像边缘。结果表示亚像素边缘的长度和像素点能够被求解得到,且保留了更多的图像特征。此外,本文也在亚像素级精度边缘上对边缘分割的技术进行了延展,具有一定实用性。
参考文献
[1]李钊宝,汪新新,贾茜媛.基于机器视觉的工件尺寸高精度测量方法[J].计算机测量与控制.2015( 6):1866-1870.
[2]刘冉,丁春燕.SAR图像双边滤波算法及MATLAB仿真实验[J].数字技术与应用,2021(9):38-40.
[3]田贝乐,牛宏侠,刘义健.一种优化的Canny边缘检测算法[J].铁路计算机应用,2021( 10):14-18.
[4]陈海峰.数字图像中基本几何形状检测算法的研究与应用[D].杭州:浙江大学,2007.
[5]王章锋.边缘检测方法研究及应用[D].天津:天津工业大学.2017.
[6]余松煜,周源华,张瑞.数字图像处理[M].上海:上海交通大学出版社.2007.
[7]王志明.数字图像处理与分析[M].北京:清华大学出版社,2012.
[8]田原嫄,谭庆昌.亚像素边缘定位算法过滤噪声的分析[J].东北电力大学学报,2016( 5):43-47.
[9lPETROU M.BOSDOCJIANNI P.数字图像处理疑难解析[M].北京:机械工业出版社,2005.
[10]甘泉,魏利胜,张平改.基于图像处理的圆形工件尺寸检测方法[J].黑龙江工业学院学报(综合版),2017(7):39-43.
[11]刘国栋,刘炳国,陈凤东,等.亚像素定位算法精度评价方法的研究[J].光学学报,2009( 12):3446-3451.
(编辑王永超)
