
基于图像处理的室内巡检机器人坐标提取方法研究
2023-06-21 08:03:41葛动元周加超丛佩超
机电信息 2023年12期
葛动元 周加超 丛佩超


摘要:为获取室内安全走道中的障碍物信息,以引导巡检机器人进行自主作业,提出一种基于分布式远程通信与二维坐标提取的地图更新方法。控制ROS(Robot Operating System)机器人基于Gmapping算法创建全局先验地图,用于巡检机器人的轨迹规划;若检测到新增障碍物,通过图像处理方法获取障碍物位置坐标,并将其作为标记点,引导机器人进行局部建图,从而实现对原始地图的更新。试验结果表明,该方法具有一定的可行性。
关键词:巡检机器人;分布式远程通信;二维坐标提取;动态地图更新
中图分类号:TP242 文献标志码:A 文章编号:1671-0797(2023)12-0086-03
DOI:10.19514/j.cnki.cn32-1628/tm.2023.12.024
0 引言
利用机器人定期对消防过道进行巡视,是人员遇到紧急事故时实现安全疏散的重要保证,而最新的环境地图信息是巡检机器人完成自主导航的前提条件。
目前,同步定位和建图(Simultaneous Localization and Mapping,SLAM)技术是通过结合检测、跟踪动态障碍物技术来实现地图的构建和更新[1]。
相关研究表明,由于系统缺乏实时更新的机制,SLAM技术构建的栅格地图在长时间运行后易产生难以修正的累计误差[2-3]。
Xu等人[4]通过改进ORB RGB-D SLAM与占用栅格地图提出了一种新的室内实时定位系统,克服了现有解决方案面临的问题,然而深度相机容易受到随机噪声的影响和感知范围的限制,导致产生深度图像的部分缺失,最终影响视觉SLAM的定位精度。
针对上述移动机器人的室内定位精度不高的问题,为进一步提高机器人室内定位准确度,本文以巡检机器人在校园内消防安全走道的自主巡检为研究背景,提出一种基于分布式远程通信与二维坐标提取的地图更新方法。
1 样机介绍和通信设置
1.1 测试样机
图1所示为深圳市创想未来科技公司研制的型号为Spark-T的自主导航机器人,本文将其作为巡检机器人的测试样机,搭载基于Ubuntu 16.04的开源机器人操作系统。
1.2 分布式通信設置
为实现通信,在Ping命令测试网络的实时工况后,基于ROS的分布式框架上所有节点可以在不同的主机上运行,因此可以通过分布式通信机制控制多机器人同时工作。本文将巡检机器人和先导机器人分别作为主机和从机,实现通信的步骤如下:
1)在两台机器人主机中设置计算机IP地址和名称,保证多个计算机底层数据通信的畅通。
2)通过在主从机上设置环境变量的方式,实现对ROS Master的位置定义。
2 Gmapping算法建图
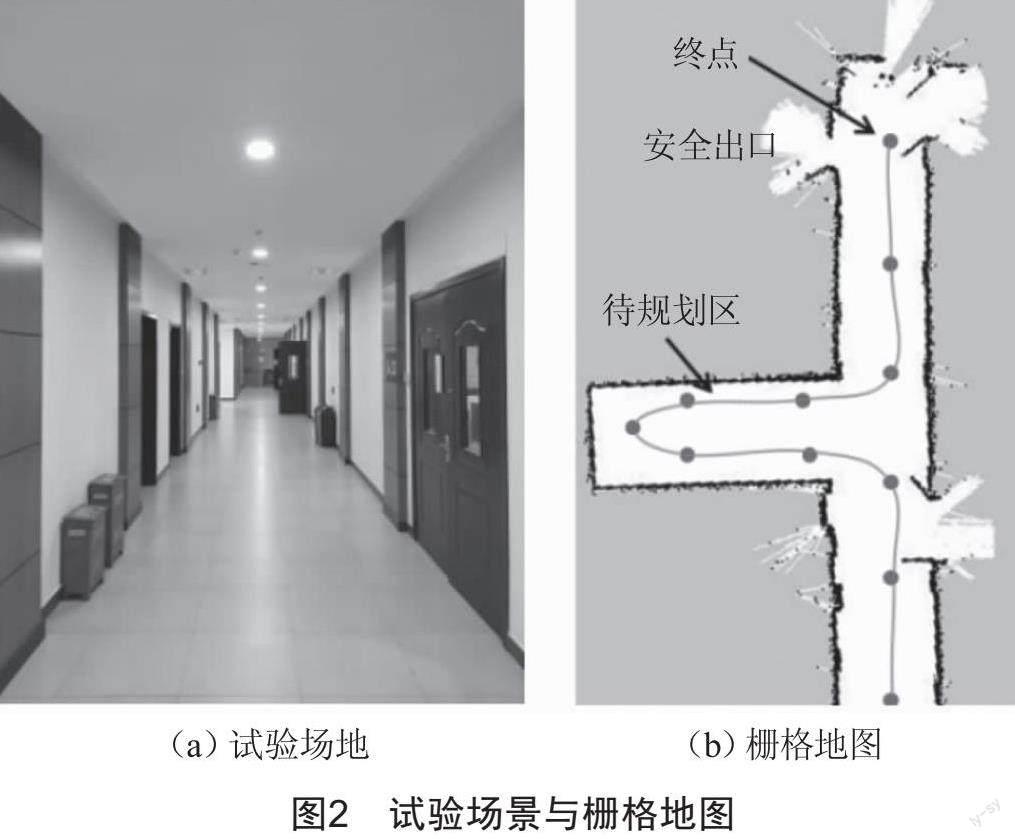
为创建全局先验地图,用于巡检机器人的轨迹规划,本节选取了校园内的一个室内安全疏散过道作为实体机器人测试场地,如图2(a)所示。
Gmapping算法主要以激光雷达和里程计为硬件载体,通过采集环境中的点云数据和里程计数据构建未知环境的地图[5]。此外,研究表明,Gmapping算法在构建例如长廊、走道等具有低特征的小场景地图时,计算开销低且建图精度高[6]。
巡检机器人在走道的工作环境属于长廊场景,因此选用基于Gmapping算法的激光SLAM作为机器人的建图算法,对走道构建全局的二维栅格地图,如图2(b)所示,并将该图作为巡检机器人导航的全局先验地图。
3 机器人坐标提取
3.1 自动巡检和坐标分析
为进行地图更新和巡检试验,在走道的安全出口旁摆放桌子等杂物作为障碍物,如图3(a)所示。生成的局部定位地图如图3(b)所示,其中红色部分代表雷达原始数据点分布情况,蓝色区域表示为保持安全距离而产生的障碍物膨胀区域。
由图3(b)可知,机器人实时避障过程中激光雷达扫描到物体的轮廓不一定完整,且膨胀区域跟周围物体相连接,难以准确提取障碍物中心坐标,即存在坐标的不确定性。相比之下,机器人的形状和大小一般固定,通过图像处理方式易于确定坐标值,且处于障碍物附近,因此将问题转化为提取机器人在避障时的实时坐标,该坐标即先导机器人的导航指引点,自主导航至此点时可与障碍物保持一定距离且不影响局部建图。
为采用直角坐标系法对机器人的位置信息进行描述,假设每个栅格的中心位置为栅格的直角坐标,(m,n)为栅格地图中任意一点,则每个栅格编号P都与(m,n)相对应,计算公式如式(1)所示。栅格中心坐标(mGrid,nGrid)与P之间同样具有映射关系。
式中:int为取整函数;mlength为坐标取值范围;S为栅格粒的大小。
3.2 机器人像素坐标确定
本节主要结合Halcon视觉库确定机器人在二维图像中的像素坐标,进行了如图4所示的图像处理操作,最终提取了机器人的像素坐标。
4 局部建图及更新
巡检机器人根据标记点的位置进行针对性的局部建图,地图更新前后的对比如图5所示。由图可知,地图(b)中出现了更多的阴影部分,说明获得了更多的障碍物信息,地图信息更加完善,更有利于后续的机器人避障作业。
5 结束语
本文提出了一种基于全局先验地图与二维坐标提取的地图更新方法。以校园的室内消防安全走道为例,对所提方法进行实体样机验证。结果表明,所提基于图像处理的机器人定位方法能对机器人进行像素坐标定位,具有一定的可行性。
[参考文献]
[1] 马辉.基于巡检车视觉的半动态目标在语义地图中的更新方法研究[D].杭州:浙江科技学院,2020.
[2] ENDRES F,HESS J,STURM J,et al.3-D mapping with an RGB-D camera[J].IEEE Transactions on Robotics,2014,30(1):177-187.
[3] WHELAN T,KAESS M,LEONARD J J,et al.Deformation-based loop closure for large scale dense RGB-D SLAM[C]//2013 IEEE/RSJ International Conference on Intelligent Robots and Systems,2013:548-555.
[4] XU L C,FENG C,KAMAT V R,et al.An occupancy grid mapping enhanced visual SLAM for real-time locating applications in indoor GPS-denied environments[J].Automation in Construction, 2019,104:230-245.
[5] ABDELRASOUL Y,SAMAN A B S H,SEBASTIAN P.A quantitative study of tuning ROS gmapping parameters and their effect on performing indoor 2D SLAM[C]// 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automa-tion(ROMA),2016:1-6.
[6] 鄭兵,陈世利,刘蓉.基于萤火虫算法优化的Gmapping研究[J].计算机工程,2018,44(9):22-27.
收稿日期:2023-03-07
作者简介:葛动元(1970—),男,湖南邵阳人,博士,副教授,研究方向:机器视觉、机器学习。
